@dc42 Build installed and running.
and I've logged a message in the console already:
*** Memory difference at offset 24: was a5a5a5a5 now 00000000
That was the final message in the console before the reset. The printer was idle. DWC was open in Chrome.
No reset to report.
M122
=== Diagnostics ===
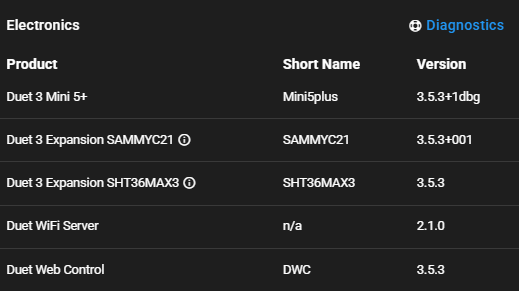
RepRapFirmware for Duet 3 Mini 5+ version 3.5.3+1dbg (2024-10-14 09:45:56) running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: NTK2Z-J196U-D65J0-40KMN-1V03Z-ZJMGF
Used output buffers: 3 of 40 (26 max)
=== RTOS ===
Static ram: 103368
Dynamic ram: 124576 of which 0 recycled
Never used RAM 10952, free system stack 156 words
Tasks: NETWORK(2,nWait 7,8.3%,228) LASER(5,nWait 7,0.0%,269) HEAT(3,nWait 6,0.0%,361) Move(4,nWait 6,0.0%,355) CanReceiv(6,nWait 1,0.1%,798) CanSender(5,nWait 7,0.0%,336) CanClock(7,delaying,0.0%,350) TMC(4,nWait 6,1.5%,101) MAIN(1,running,87.7%,665) IDLE(0,ready,1.6%,29) AIN(4,delaying,0.8%,259), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:00:18 ago, cause: software
Last software reset at 2024-10-17 18:07, reason: HardFault bfarValid precise, Gcodes spinning, available RAM 7892, slot 0
Software reset code 0x4063 HFSR 0x40000000 CFSR 0x00008200 ICSR 0x00000803 BFAR 0x00000004 SP 0x20012008 Task NETW Freestk 482 ok
Stack: 00000165 00000002 200014e4 00000164 20033af1 000a102f 0003041a 810f0000 00030411 00000000 00000000 00000000 2003111c 00000800 20036670 2002c5d8 2001882c 2002c42e 2001882c 2001ea80 000305ab 00000000 00000000 00000000 200120b8 00000014 b5ddddb2
Error status: 0x00
Aux0 errors 0,0,0
MCU revision 3, ADC conversions started 14510, completed 14510, timed out 0, errs 0
MCU temperature: min 33.7, current 33.7, max 35.1
Supply voltage: min 24.3, current 24.4, max 24.5, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 99/10, heap memory allocated/used/recyclable 2048/304/132, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 0, read errors 0, write errors 1, ifcnt 47, reads 1693, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 1: standstill, SG min 0, read errors 0, write errors 1, ifcnt 47, reads 1693, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 2: standstill, SG min 0, read errors 0, write errors 1, ifcnt 32, reads 1696, writes 10, timeouts 0, DMA errors 0, CC errors 0
Driver 3: standstill, SG min 0, read errors 0, write errors 1, ifcnt 51, reads 1692, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 4: standstill, SG min 0, read errors 0, write errors 1, ifcnt 51, reads 1693, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 5: standstill, SG min 0, read errors 0, write errors 1, ifcnt 47, reads 1693, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 6: standstill, SG min 0, read errors 0, write errors 1, ifcnt 32, reads 1696, writes 10, timeouts 0, DMA errors 0, CC errors 0
Date/time: 2024-10-17 18:07:41
Cache data hit count 35094639
Slowest loop: 5.03ms; fastest: 0.16ms
=== Storage ===
Free file entries: 20
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 0.5ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 0.00
no step interrupt scheduled
Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0
=== DDARing 0 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000803
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 181, received 573, lost 0, errs 0, boc 0
Longest wait 2ms for reply type 6060, peak Tx sync delay 90, free buffers 26 (min 25), ts 95/94/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 4.31ms; fastest: 0.00ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0)
HTTP sessions: 1 of 8
=== WiFi ===
Interface state: active
Module is connected to access point
Failed messages: pending 0, notrdy 0, noresp 0
Firmware version 2.1.0
MAC address d8:bf:c0:14:e5:fc
Module reset reason: Power up, Vcc 3.36, flash size 2097152, free heap 42932
WiFi IP address 192.168.2.8
Signal strength -47dBm, channel 1, mode 802.11n, reconnections 0
Clock register 00002001
Socket states: 0 0 0 0 0 0 0 0
And a second reset about an hour later.
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.5.3+1dbg (2024-10-14 09:45:56) running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: NTK2Z-J196U-D65J0-40KMN-1V03Z-ZJMGF
Used output buffers: 3 of 40 (28 max)
=== RTOS ===
Static ram: 103368
Dynamic ram: 124564 of which 12 recycled
Never used RAM 10952, free system stack 156 words
Tasks: NETWORK(2,nWait 7,15.5%,241) LASER(5,nWait 7,0.0%,269) HEAT(3,nWait 6,0.0%,335) Move(4,nWait 6,0.0%,355) CanReceiv(6,nWait 1,0.1%,773) CanSender(5,nWait 7,0.0%,336) CanClock(7,delaying,0.0%,348) TMC(4,nWait 6,1.5%,101) MAIN(1,running,82.1%,665) IDLE(0,ready,0.0%,29) AIN(4,delaying,0.8%,259), total 100.0%
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 01:14:36 ago, cause: software
Last software reset at 2024-10-17 19:14, reason: HardFault bfarValid precise, none spinning, available RAM 10952, slot 1
Software reset code 0x0073 HFSR 0x40000000 CFSR 0x00008200 ICSR 0x00000803 BFAR 0x0000001c SP 0x20012008 Task NETW Freestk 482 ok
Stack: 2002c5f0 200328a0 200014e4 00000000 ffffffff 00030425 00030338 610f0000 00030411 00000000 00000000 00000000 200328ac 00000800 200365c0 2002c5d8 2001882c 2002c42e 2001882c 2001ea80 000305ab 00000000 00000000 00000000 200120b8 00000014 b5ddddb2
Error status: 0x00
Aux0 errors 0,0,0
MCU revision 3, ADC conversions started 3357571, completed 3357570, timed out 0, errs 0
MCU temperature: min 30.2, current 30.7, max 32.1
Supply voltage: min 24.3, current 24.3, max 24.5, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 99/10, heap memory allocated/used/recyclable 2048/304/132, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 0, read errors 0, write errors 1, ifcnt 61, reads 13726, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 1: standstill, SG min 0, read errors 0, write errors 1, ifcnt 61, reads 13726, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 2: standstill, SG min 0, read errors 0, write errors 1, ifcnt 43, reads 13729, writes 10, timeouts 0, DMA errors 0, CC errors 0
Driver 3: standstill, SG min 0, read errors 0, write errors 1, ifcnt 65, reads 13726, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 4: standstill, SG min 0, read errors 0, write errors 1, ifcnt 65, reads 13726, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 5: standstill, SG min 0, read errors 0, write errors 1, ifcnt 61, reads 13726, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 6: standstill, SG min 0, read errors 0, write errors 1, ifcnt 43, reads 13729, writes 10, timeouts 0, DMA errors 0, CC errors 0
Date/time: 2024-10-17 20:29:25
Cache data hit count 4294967295
Slowest loop: 9.45ms; fastest: 0.16ms
=== Storage ===
Free file entries: 20
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 4.7ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 0.00
no step interrupt scheduled
Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0
=== DDARing 0 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000803
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 40299, received 127619, lost 0, errs 0, boc 0
Longest wait 2ms for reply type 6031, peak Tx sync delay 282, free buffers 26 (min 25), ts 22384/22383/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 7.94ms; fastest: 0.00ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0)
HTTP sessions: 1 of 8
=== WiFi ===
Interface state: active
Module is connected to access point
Failed messages: pending 0, notrdy 0, noresp 0
Firmware version 2.1.0
MAC address d8:bf:c0:14:e5:fc
Module reset reason: Power up, Vcc 3.36, flash size 2097152, free heap 42772
WiFi IP address 192.168.2.8
Signal strength -48dBm, channel 1, mode 802.11n, reconnections 0
Clock register 00002001
Socket states: 0 0 0 0 0 0 0 0
 button. If you click it'll have the particular URL for cloning the repository using the command line, or a button for opening in Github Desktop.
button. If you click it'll have the particular URL for cloning the repository using the command line, or a button for opening in Github Desktop.