Hello everyone!
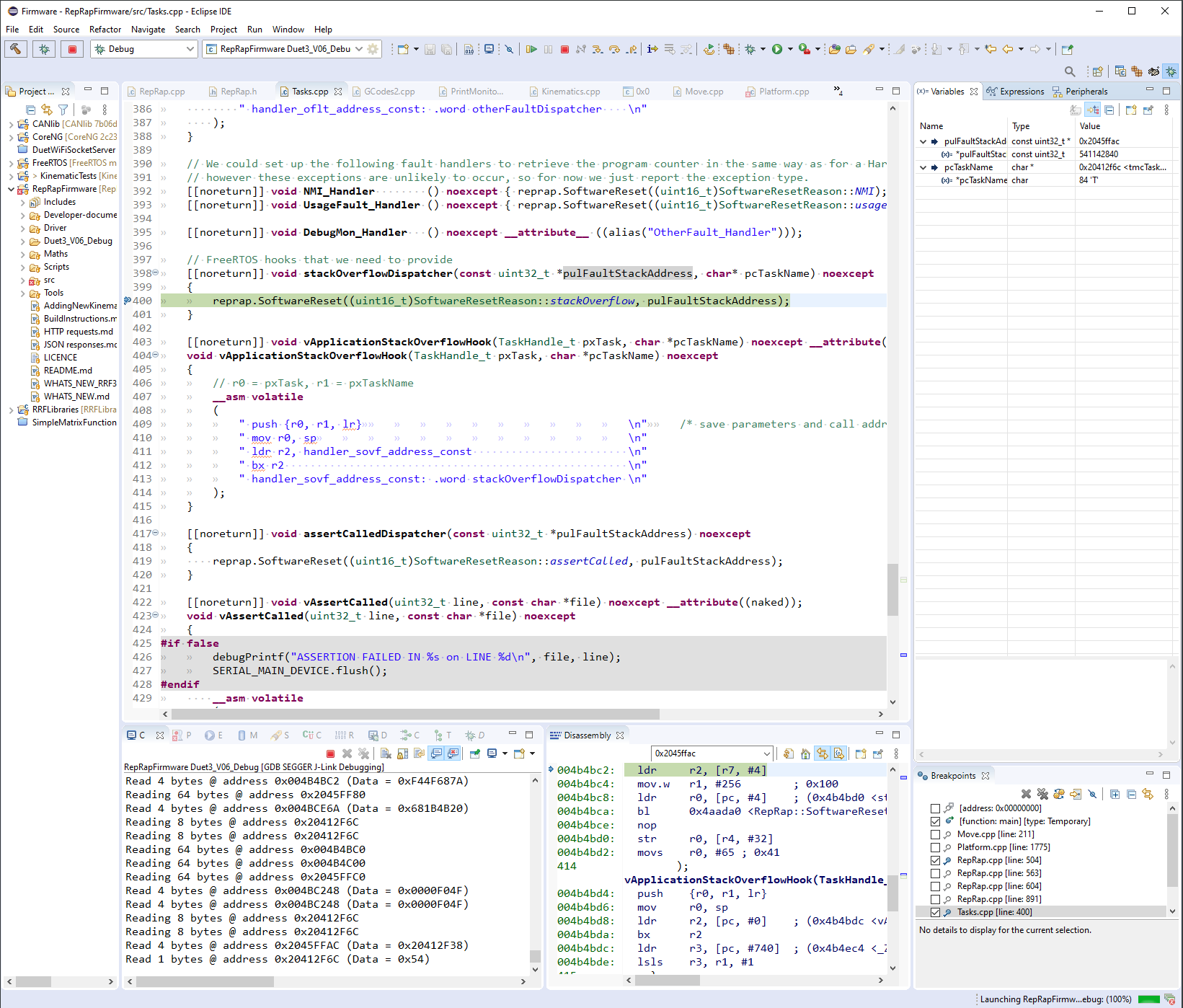
My second post here and got some stochastic “SoftwareResetReason::stackOverflow” when my robot moves (See attached screenshot).
-> RepRapFirmware: v3.01-dev [Debug-Build] (Commit hash 5dda6c9d5aaa24ea94f9246db73e702580e5d0dc).
In the function stackOverflowDispatcher(pulFaultStackAddress, pcTaskName) in Tasks.cpp I got the values pulFaultStackAddress= 0x2045ffac and pcTaskName= TMC.
So thinking that there is maybe an issue in Stepper Drivers at TMC, but actually I don’t know exactly.
Does anyone know this problem or how to fix it?
Thanks in advance,
Best Peter
Hardware
- Duet 3 Board (ATSAM70Q20)
Duet 3 Firmware
- RepRapFirmware: v3.01-dev [Debug-Build] (Commit hash 5dda6c9d5aaa24ea94f9246db73e702580e5d0dc).
- RRFLibraries: dev
- CoreNG: dev
- FreeRTOS: master
- DuetWiFiSocketServer: master
[4_1593442677965_Duet3Firmware.bin](Uploading 100%) [3_1593442677965_Duet3Firmware.7z.002](Uploading 100%) [2_1593442677965_Duet3Firmware.7z.001](Uploading 100%) [1_1593442677965_config.g](Uploading 100%) 
")
")