@chrishamm ok
Posts made by reczul.01
-
RE: Setting up Accelerometer and wiringposted in Duet Hardware and wiring
@chrishamm If you would like I can give you remote acces to my printer
-
RE: Setting up Accelerometer and wiringposted in Duet Hardware and wiring
@chrishamm said in Setting up Accelerometer and wiring:
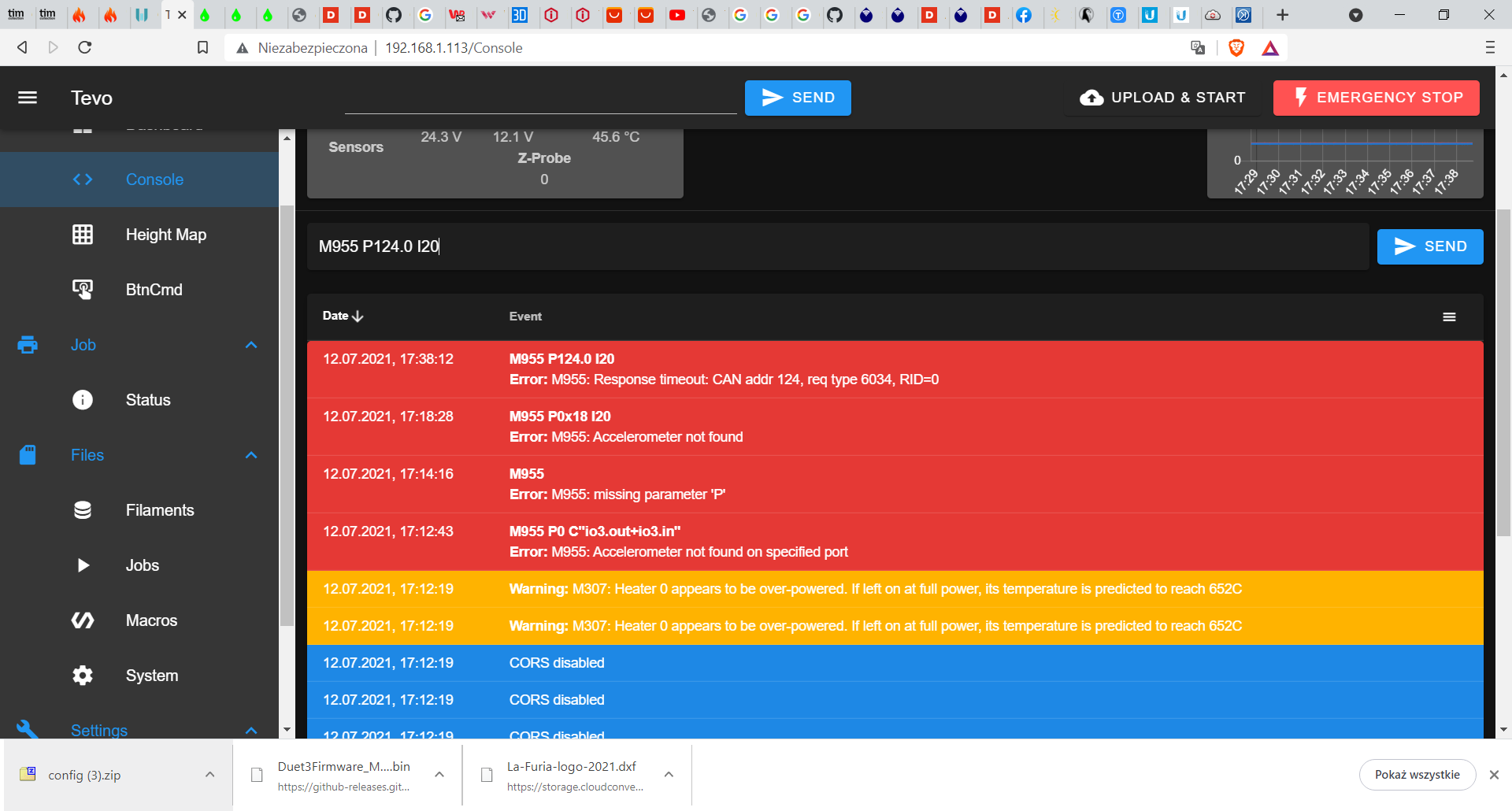
M955 P0 C"io3.out+io3.in"
I managed to remake connections and now it works, beside collecting data
-
RE: Setting up Accelerometer and wiringposted in Duet Hardware and wiring
@chrishamm said in Setting up Accelerometer and wiring:
M955 P0 C"io3.out+io3.in" Q500000
Unfortunately non those commands work, I did check continuity but in a second I will do it again
-
RE: Setting up Accelerometer and wiringposted in Duet Hardware and wiring
@chrishamm I have a small problem (I did solder resistors to filter out noise) I cannot connect to accelerometer
-
RE: Setting up Accelerometer and wiringposted in Duet Hardware and wiring
@dc42 Could check my diagram?
-
RE: Setting up Accelerometer and wiringposted in Duet Hardware and wiring
Can somebody help me with wiring diagram to connecting the same acclolmeter as one above to duet 3 6hc 1.01.
-
Setting up Accelerometer and wiringposted in Duet Hardware and wiring
Hi do any body have a wiring diagram for accelerometer and firmware guide on hand?
-
RE: Error with homingposted in Duet Hardware and wiring
@jay_s_uk What is the default password to duetpi frimware?
-
RE: Error with homingposted in Duet Hardware and wiring
@jay_s_uk said in Error with homing:
M122?
=== Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode) Board ID: 08DJM-956L2-G43S4-6J9D6-3S86J-KA56F Used output buffers: 1 of 40 (10 max) === RTOS === Static ram: 154604 Dynamic ram: 162552 of which 32 recycled Exception stack ram used: 224 Never used ram: 75804 Tasks: ETHERNET(blocked,844) NETWORK(ready,1980) HEAT(blocked,1200) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1452) TMC(blocked,204) MAIN(running,5096) IDLE(ready,76) Owned mutexes: === Platform === Last reset 00:00:47 ago, cause: software Last software reset at 2021-07-06 17:12, reason: User, spinning module LinuxInterface, available RAM 75308 bytes (slot 0) Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN Error status: 0 MCU temperature: min 41.3, current 41.7, max 41.9 Supply voltage: min 24.3, current 24.3, max 24.3, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0 Driver 0: standstill, reads 36163, writes 14 timeouts 0, SG min/max 0/0 Driver 1: standstill, reads 36163, writes 14 timeouts 0, SG min/max 0/0 Driver 2: standstill, reads 36164, writes 14 timeouts 0, SG min/max 0/0 Driver 3: standstill, reads 36164, writes 14 timeouts 0, SG min/max 0/0 Driver 4: standstill, reads 36168, writes 11 timeouts 0, SG min/max 0/0 Driver 5: standstill, reads 36168, writes 11 timeouts 0, SG min/max 0/0 Date/time: 2021-07-06 17:12:56 Slowest loop: 4.21ms; fastest: 0.14ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === Hiccups: 0(0), FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP* is ready with "M122" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 0, running macro Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon* is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 0.88ms; fastest: 0.01ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions HTTP sessions: 0 of 8 - Ethernet - State: establishingLink Error counts: 0 0 0 0 0 Socket states: 0 0 0 0 0 0 0 0 === CAN === Messages sent 178, longest wait 0ms for type 0 === Linux interface === State: 0, failed transfers: 1 Last transfer: 19ms ago RX/TX seq numbers: 1881/1882 SPI underruns 1, overruns 1 Number of disconnects: 0 Buffer RX/TX: 0/0-0 === Duet Control Server === Duet Control Server v3.2.2 Trigger: Buffered code: T0 ; select first tool ==> 20 bytes Executing macro config.g, started by system > Next stack level Code buffer space: 4096 Configured SPI speed: 8000000 Hz Full transfers per second: 40.97 Maximum length of RX/TX data transfers: 5256/804 -
RE: Error with homingposted in Duet Hardware and wiring
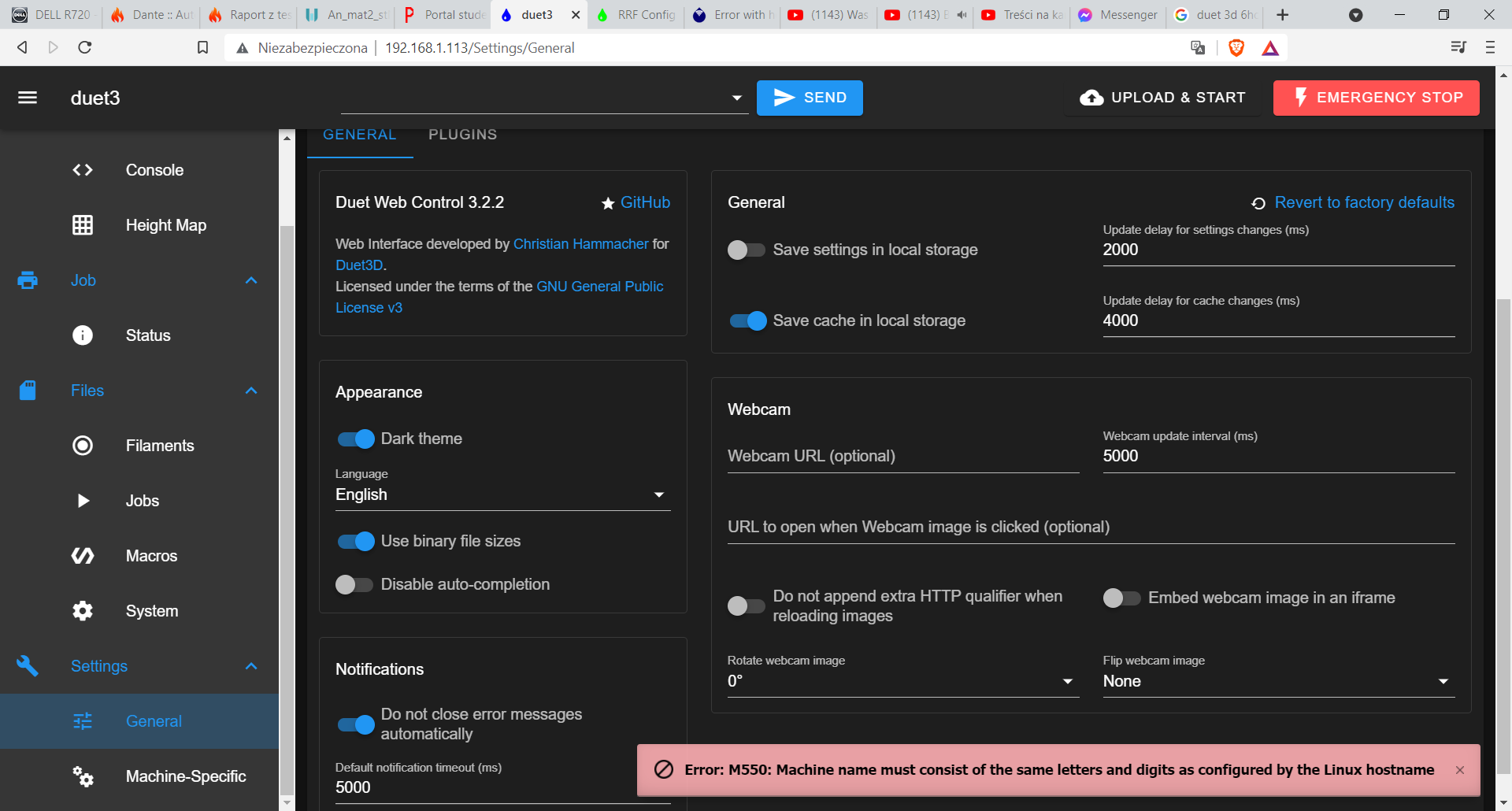
@jay_s_uk I have just recived new 6HC 1.01v after my first one turned out defective.
; Configuration file for Duet 3 (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.2.3 on Tue Jul 06 2021 17:37:28 GMT+0200 (czas środkowoeuropejski letni) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Tevo" ; set printer name ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S1 ; enable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S0 ; physical drive 0.0 goes backwards M569 P0.1 S0 ; physical drive 0.1 goes backwards M569 P0.2 S1 ; physical drive 0.2 goes forwards M569 P0.3 S0 ; physical drive 0.3 goes backwards M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping M350 E256 I0 ; configure microstepping without interpolation M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M92 X80.32 Y80.32 Z399.29 E3492.31 ; set steps per mm M566 X1200.00 Y1200.00 Z1200.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X540000.00 Y540000.00 Z72000.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z5000.00 E250.00 ; set accelerations (mm/s^2) M906 X950 Y1200 Z950 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X300 Y300 Z400 S0 ; set axis maxima ; Endstops M574 X1 S1 P"!io0.in" ; configure active-high endstop for low end on X via pin !io0.in M574 Y1 S1 P"!io1.in" ; configure active-high endstop for low end on Y via pin !io1.in M574 Z1 S1 P"!io4.in" ; configure active-high endstop for low end on Z via pin !io4.in ; Z-Probe ;M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed ;M557 X5:265 Y10:300 S40 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out1" T0 ; create bed heater output on out1 and map it to sensor 0 M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out0" T1 ; create nozzle heater output on out0 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"out7" Q500 ; create fan 0 on pin out7 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out8" Q500 ; create fan 1 on pin out8 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 S"E3D" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss T0 ; select first tool -
RE: Error with homingposted in Duet Hardware and wiring
@jay_s_uk ; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Tue Jul 06 2021 17:37:28 GMT+0200 (czas środkowoeuropejski letni)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-305 Y-305 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-305 Y-305 F360 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z-405 F360 ; move Z down stopping at the endstop
G90 ; absolute positioning
G92 Z0 ; set Z position to axis minimum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
Error with homingposted in Duet Hardware and wiring
Hi, I have a problem. While I'm trying to home printer it is getting stuck in endless loop of homing. Here is video: https://youtu.be/wbYwX1FOeWI
-
RE: IO_4 not workingposted in Duet Hardware and wiring
@phaedrux THX for your help It was pleasure to talk to you