Hi
I have configured hardware with MB6XD and MB6HC connected via CAN as a controller for OpenPnP, but I'm struggling to resolve an error that occurs in the definition of the input port for homing, Could you please give me some advice?
The error message in the console log of the 6XD is as follows:
"Error in start-up file macro line 85: Pin 'io0.in' is not free"
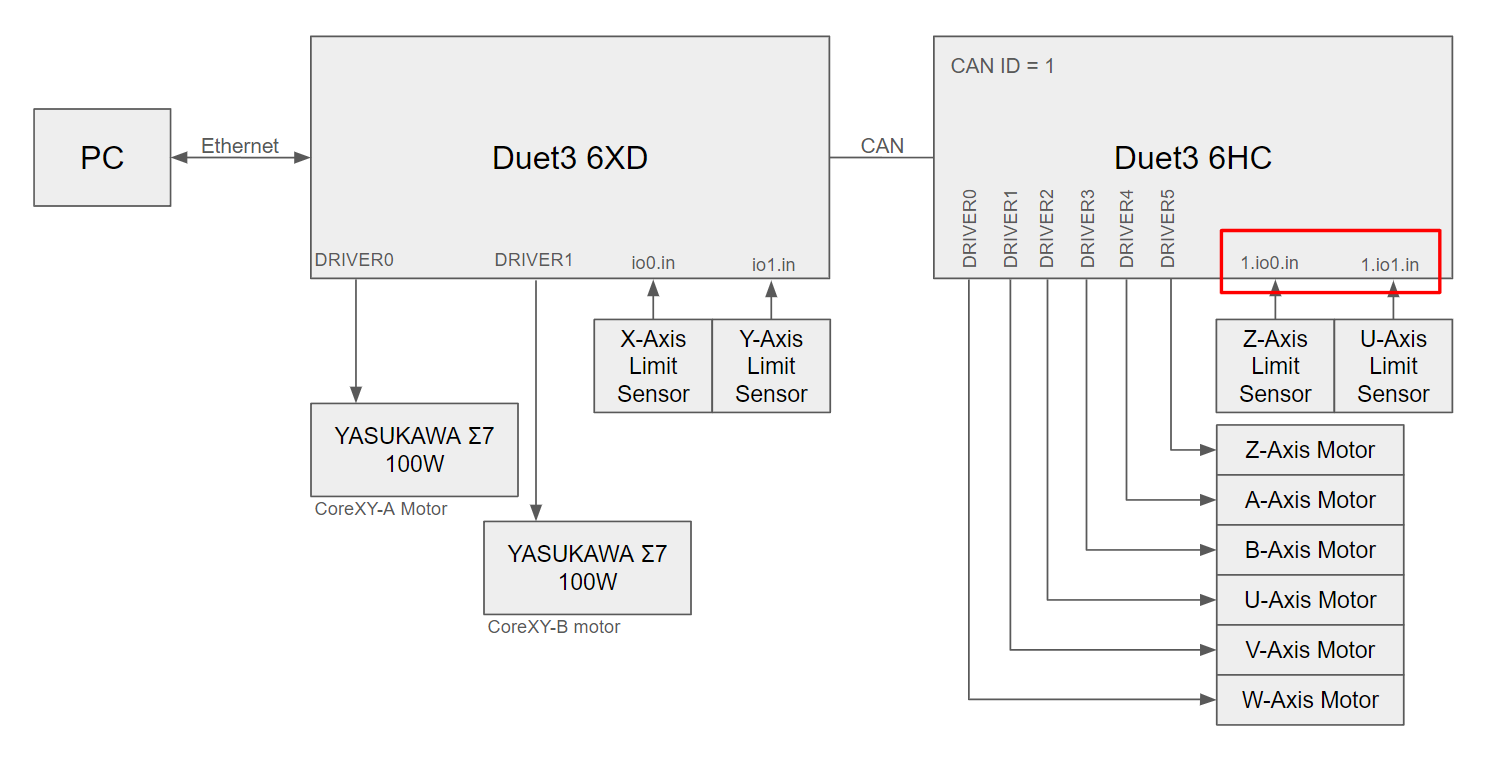
In line 85 of config.g, it is defined as follows. It is assumed that io0.in of MB6HC (CAN ID1) will be used.
M574 Z1 P"^1.io0.in" S1
; Endstops
M574 X2 P"^io0.in" S1 ; configure X axis endstop ; endstop for high end on X via pin ^io0.in
M574 Y2 P"^io1.in" S1 ; configure Y axis endstop ; endstop for high end on Y via pin ^io1.in
M574 Z1 P"^1.io0.in" S1 ; configure Z axis endstop ; endstop for low end on Z0 via pin ^1.io0.in
;M574 A0 ; configure A axis endstop
;M574 B0 ; configure B axis endstop
M574 U1 P"^1.io1.in" S1 ; configure U axis endstop ; endstop for high end on Z1 via pin ^1.io1.in
;M574 V0 ; configure V axis endstop
;M574 W0 ; configure W axis endstop
I have not been able to understand the following points:
- The settings for M350, M566, M203, etc., should be defined in the configuration file of the board to which the axis belongs, or in the configuration file of the host board?
- Is it possible to use the input ports of the Expansion Board for the endstop port used for homing? If so, what is the specific method for doing this?
The CAN connection with the 6HC was confirmed to be working by executing the following command from the MB6XD console, and verifying that the servo motor for radio control connected to the MB6HC operates:
M288 P9 S120
I am sharing a simplified block diagram, configuration files, and results from executing M98 P"config.g" here:
https://github.com/crono2250/mounter_duet3_config
The firmware versions for each board are as follows:
Duet 3 MB6XD: Version 3.5.2
Duet 3 Expansion MB6HC: Version 3.5.2
Duet Web Control (DWC): Version 3.5.2
thank you
Ryosuke
