@dc42
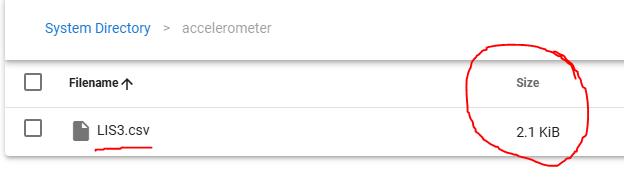
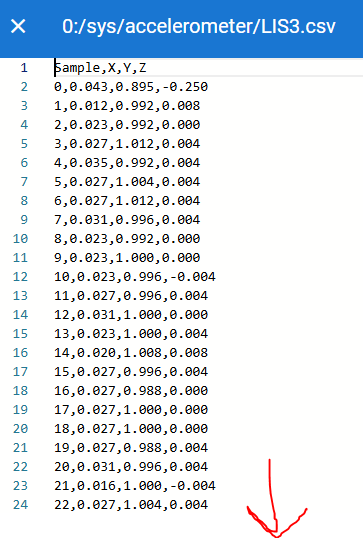
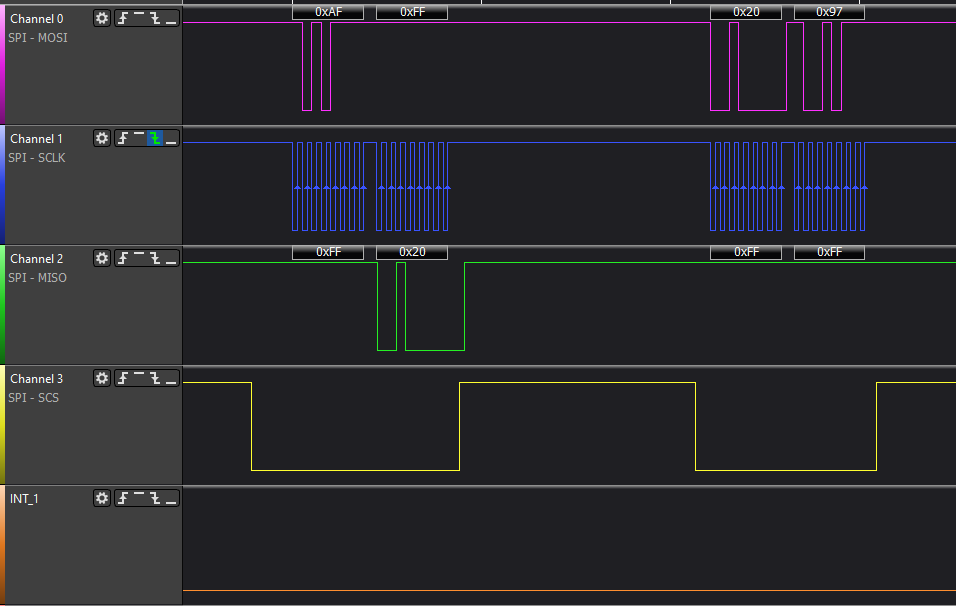
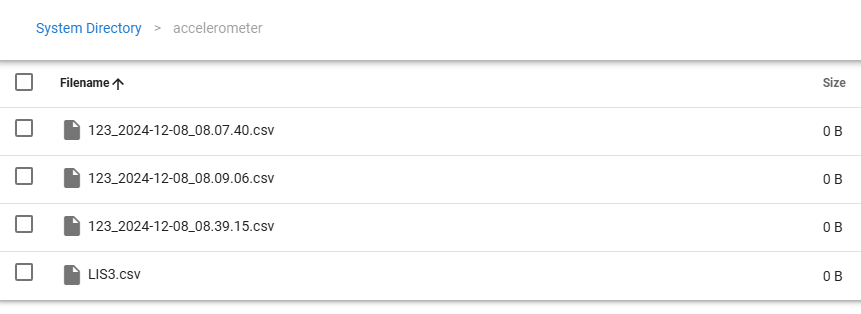
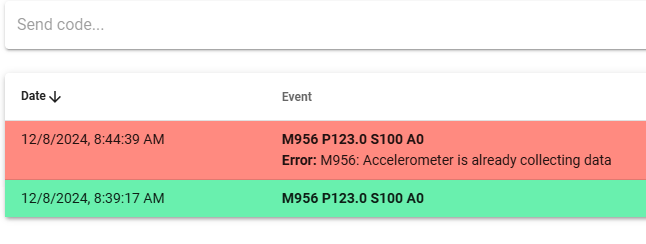
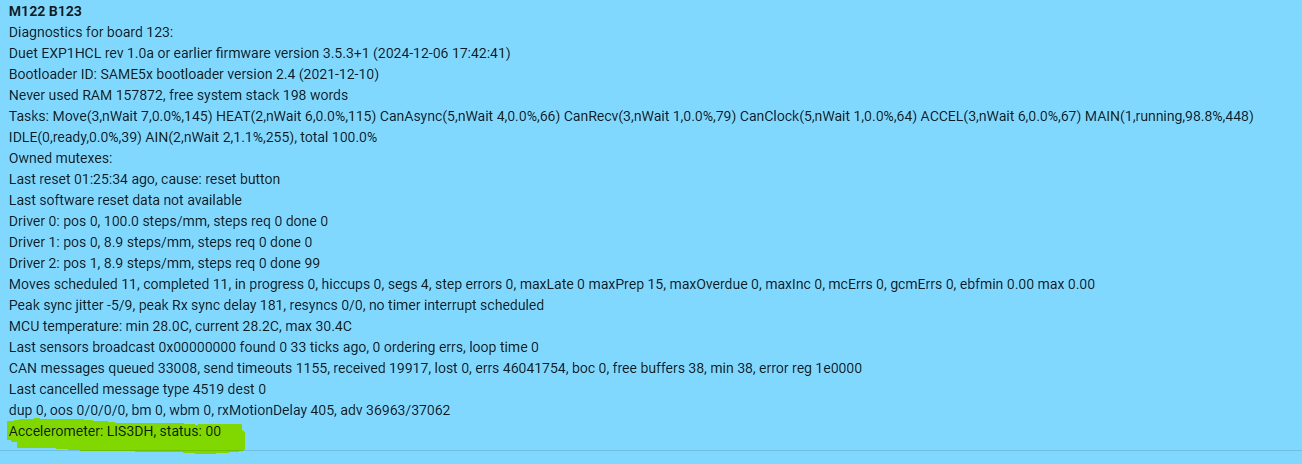
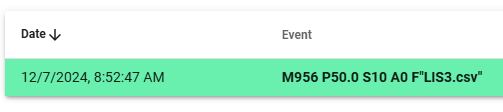
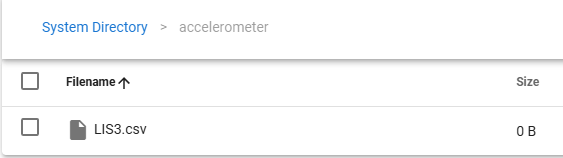
hmm doesn't appear to be working. I am able to set the command and create the .csv file, but the file stays empty;
Here is the config setup
M955 P50.0 I20
;M955 P50.0 C"spi.cs1+spi.cs0" I10 ; configure accelerometer on exp using SPI pins and specify orientation
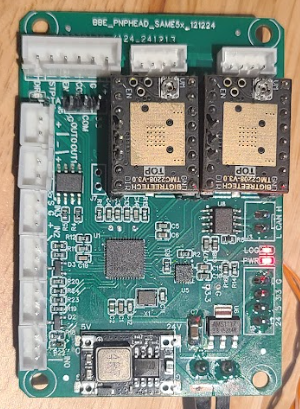
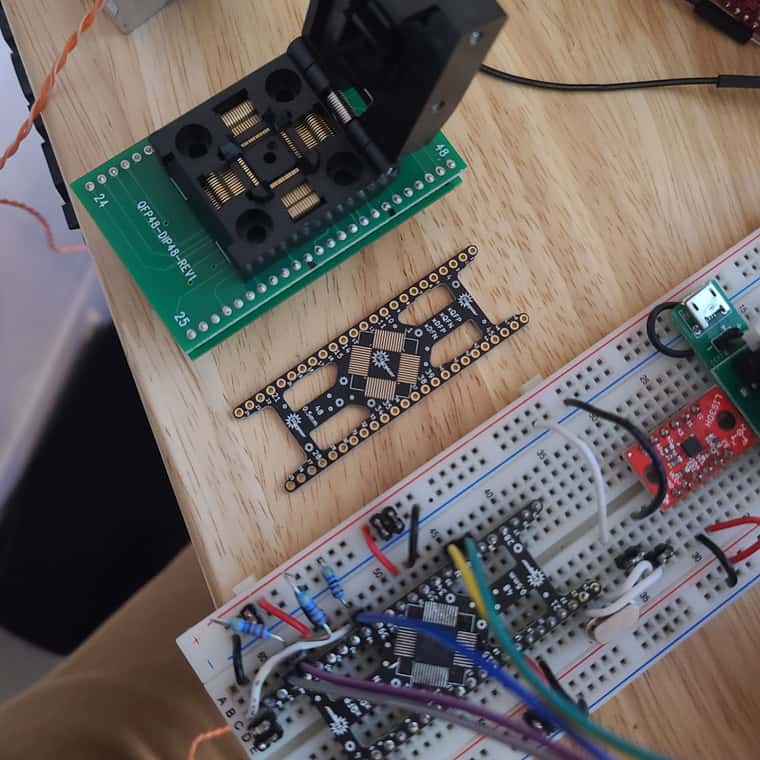
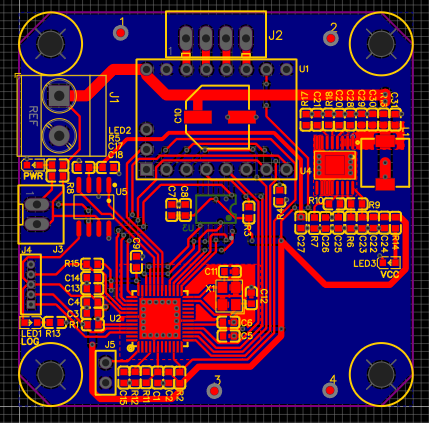
Again, this is custom FW on custom HW. I'm fairly confident in the HW. Not so confident in my FW config.
I have set things for;
- x3 dumb drivers; all 3 step signals working but dir on driver2 not working, HW correctly ohms out
- x2 outs; all work
- x2 io inputs; appear functional but not working as expected. Input changes are not reflected in the OM. I'm sure the HW is wired correctly as setting them as pullup via config '^' pulls them to vddd otherwise, they float.
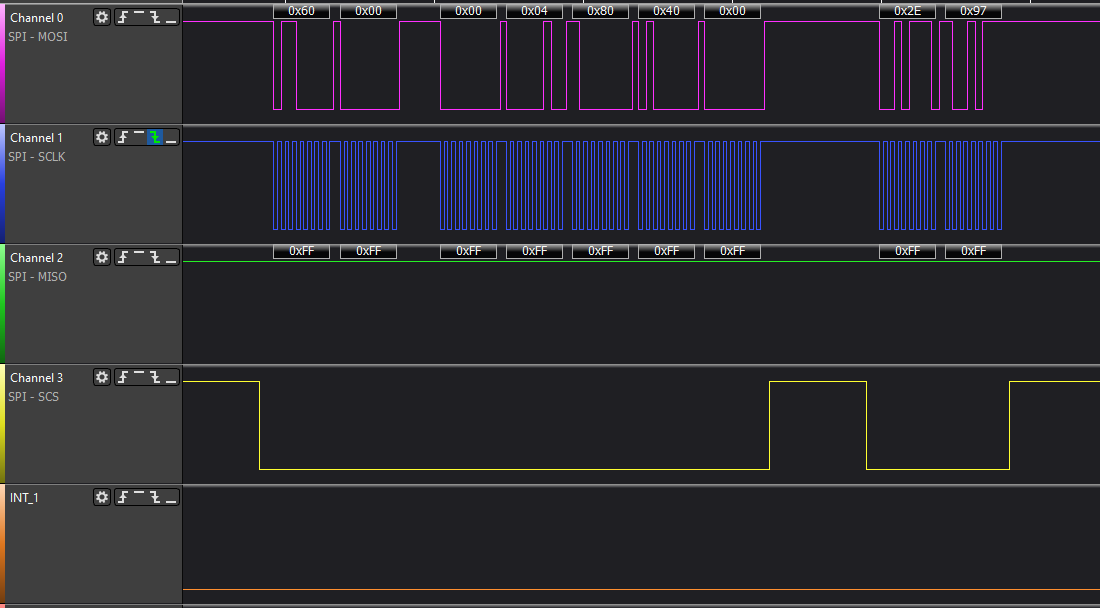
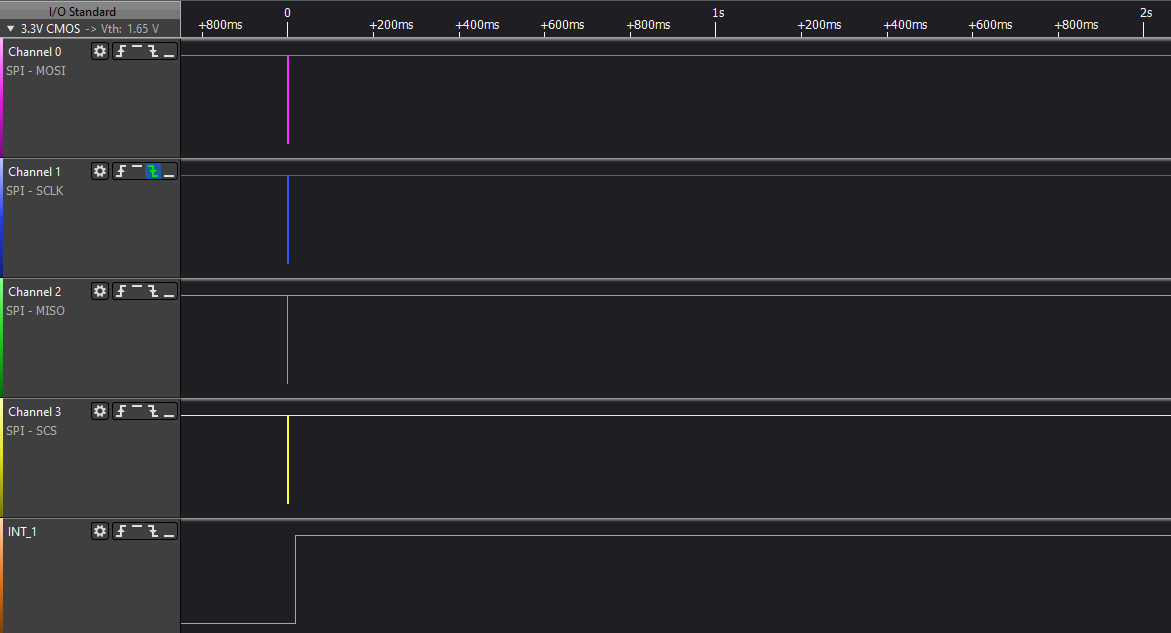
- x1 spi for LIS3. under review
Here the FW config
#if SUPPORT_LIS3DH
# if SUPPORT_I2C_SENSORS
# define ACCELEROMETER_USES_SPI (0) // accelerometer is connected via I2C
constexpr Pin Lis3dhInt1Pin = PortAPin(20); // same as io1.in
# else
# define ACCELEROMETER_USES_SPI (1) // accelerometer is connected via SPI
constexpr Pin Lis3dhCsPin = PortAPin(18); // same as encoder CS pin
constexpr Pin Lis3dhInt1Pin = PortAPin(12); // same as io1.in
# endif
#endif
// Shared SPI (used for interface to encoders, not for temperature sensors)
constexpr uint8_t SspiSercomNumber = 1;
constexpr uint32_t SspiDataInPad = 3;
constexpr Pin SSPIMosiPin = PortAPin(16);
constexpr GpioPinFunction SSPIMosiPinPeriphMode = GpioPinFunction::C;
constexpr Pin SSPISclkPin = PortAPin(17);
constexpr GpioPinFunction SSPISclkPinPeriphMode = GpioPinFunction::C;
constexpr Pin SSPIMisoPin = PortAPin(19);
constexpr GpioPinFunction SSPIMisoPinPeriphMode = GpioPinFunction::C;
//**REMAPPED we use the decoder pins for other things
// Position decoder
//constexpr Pin PositionDecoderPins[] = { PortAPin(24), PortAPin(25), PortBPin(22) };
//constexpr GpioPinFunction PositionDecoderPinFunction = GpioPinFunction::G;
// Clock generator pin for TMC2160
constexpr uint8_t ClockGenGclkNumber = 5;
constexpr Pin ClockGenPin = PortBPin(11);
constexpr GpioPinFunction ClockGenPinPeriphMode = GpioPinFunction::M;
// Brake On pin for version 2.0 board. If the BrakwPwmPort is configured as the brake pin in M569.7 then the BrakeOnPin is used implicitly as well.
//**REMAPP**//constexpr Pin BrakePwmPin = PortBPin(10);
//**REMAPP**//constexpr Pin BrakeOnPin = PortAPin(20);
constexpr auto sercom2cPad0 = SercomIo::sercom2c + SercomIo::pad0;
constexpr auto sercom2cPad1 = SercomIo::sercom2c + SercomIo::pad1;
// Table of pin functions that we are allowed to use
constexpr PinDescription PinTable[] =
{
// TC TCC ADC SERCOM in SERCOM out Exint PinName
// Port A
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 0, "spi.cs1" }, // PA00 CAN reset jumper on V0 boards, spi.cs1 on V1 boards
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 0, nullptr }, // PA00 //**REMAPPED CAN RST**//
// { TcOutput::tc2_1, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "out0" }, // PA01 OUT0 /**REMAPP**/
{ TcOutput::tc2_1, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA01 //**REMAPPED**//
{ TcOutput::none, TccOutput::none, AdcInput::adc0_0, SercomIo::none, SercomIo::none, Nx, "ate.vin" }, // PA02 VIN monitor
{ TcOutput::none, TccOutput::none, AdcInput::adc0_1, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA03 board type
{ TcOutput::none, TccOutput::none, AdcInput::adc0_4, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA04 VREF_MON
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA05 driver ENN
{ TcOutput::none, TccOutput::none, AdcInput::adc0_6, SercomIo::none, SercomIo::none, Nx, "ate.v12" }, // PA06 12v monitor
// { TcOutput::none, TccOutput::none, AdcInput::adc0_7, SercomIo::none, SercomIo::none, 7, "temp1" }, // PA07 TEMP1 /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA07 //**REMAPPED driver2 DIR**//
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA08 driver MOSI /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "out1" }, // PA08 //**REMAPPED out1 **//
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA09 driver SCLK /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "out0" }, // PA09 //**REMAPPED "out0" **//
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA10 driver CS /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 13, "io1.in" }, // PA10 driver CS //**REMAPPED "io1.in"**//
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA11 driver MISO /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 3, "io0.in" }, // PA11 driver MISO //**REMAPPED "io0.in"**//
// { TcOutput::none, TccOutput::tcc1_2F, AdcInput::none, SercomIo::none, sercom2cPad0, Nx, "io1.out" }, // PA12 IO1 out, I2C capable /**REMAPP**/
{ TcOutput::none, TccOutput::tcc1_2F, AdcInput::none, SercomIo::none, sercom2cPad0, 1, nullptr }, // PA12 //**REMAPPED ACCEL_INT**//
// { TcOutput::none, TccOutput::none, AdcInput::none, sercom2cPad1, SercomIo::none, 13, "io1.in" }, // PA13 IO1 in, I2C capable /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, sercom2cPad1, SercomIo::none, Nx, nullptr }, // PA13 //**REMAPPED **//
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA14 crystal
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA15 crystal
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA16 AS5047/SPI MOSI (SERCOM1.0)
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA17 AS5047/SPI SCK (SERCOM1.1)
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 2, "spi.cs0,ate.spi.cs" }, // PA18 AS5047/SPI CS (SERCOM1.2)
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA19 AS5047/SPI MISO (SERCOM1.3)
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa20,brake.pos"}, //**REMAPP**// // PA20 test pad/spare on V1, Brake On on V2
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA20 //**REMAPPED driver1 EN** //
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 5, "ate.d0.diag" }, // PA21 driver DIAG /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA21 //**REMAPPED**//
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA22 CAN0 Tx
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA23 CAN0 Rx
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 8, "pdec.a" }, // PA24 PDEC0 /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA24 //**REMAPPED driver1 DIR**//
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 9, "pdec.b" }, // PA25 PDEC1 /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA25 //**REMAPPED driver0 EN**//
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA26 not on chip
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "ate.d0.dir" }, // PA27 driver DIR /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA27 //**REMAPPED driver0 DIR**//
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA28 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA29 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA30 swclk and LED0
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA31 swdio and LED1
// Port B
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB00 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB01 not on chip
// { TcOutput::none, TccOutput::tcc2_2F, AdcInput::none, SercomIo::none, SercomIo::sercom5d, Nx, "io0.out" }, // PB02 IO0 out, UART available /**REMAPP**/
{ TcOutput::none, TccOutput::tcc2_2F, AdcInput::none, SercomIo::none, SercomIo::sercom5d, Nx, nullptr }, // PB02 //**REMAPPED driver2 EN**//
// { TcOutput::none, TccOutput::none, AdcInput::adc0_15, SercomIo::sercom5d, SercomIo::none, 3, "io0.in" }, // PB03 IO0 in, UART available /**REMAPP**/
{ TcOutput::none, TccOutput::none, AdcInput::adc0_15, SercomIo::sercom5d, SercomIo::none, Nx, nullptr }, // PB03 //**REMAPPED**//
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB04 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB05 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB06 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB07 not on chip
// { TcOutput::none, TccOutput::none, AdcInput::adc0_2, SercomIo::none, SercomIo::none, Nx, "temp0" }, // PB08 TEMP0 //**REMAPP**//
{ TcOutput::none, TccOutput::none, AdcInput::adc0_2, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB08 //**REMAPPED driver2 step**//
{ TcOutput::none, TccOutput::none, AdcInput::adc0_3, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB09 VSSA monitor
// { TcOutput::none, TccOutput::tcc0_4F, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "out1,brake,brake.neg" }, // PB10 OUT1 //**REMAPP**//
{ TcOutput::none, TccOutput::tcc0_4F, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB10 OUT1 //**REMAPP**//
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB11 CLKOUT
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB12 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB13 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB14 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB15 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB16 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB17 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB18 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB19 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB20 not on chip
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB21 not on chip
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, 6, "pdec.n" }, // PB22 PDEC2
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB22 //**REMAPPED driver1 step**//
// { TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "ate.d0.step" }, // PB23 driver STEP
{ TcOutput::none, TccOutput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB23 //**REMAPPED driver0 step**//
};
static constexpr size_t NumPins = ARRAY_SIZE(PinTable);
static constexpr size_t NumRealPins = 32 + 24; // 32 pins on port A (some missing), 24 on port B
static_assert(NumPins == NumRealPins); // no virtual pins in this table
Thanks for the help on this



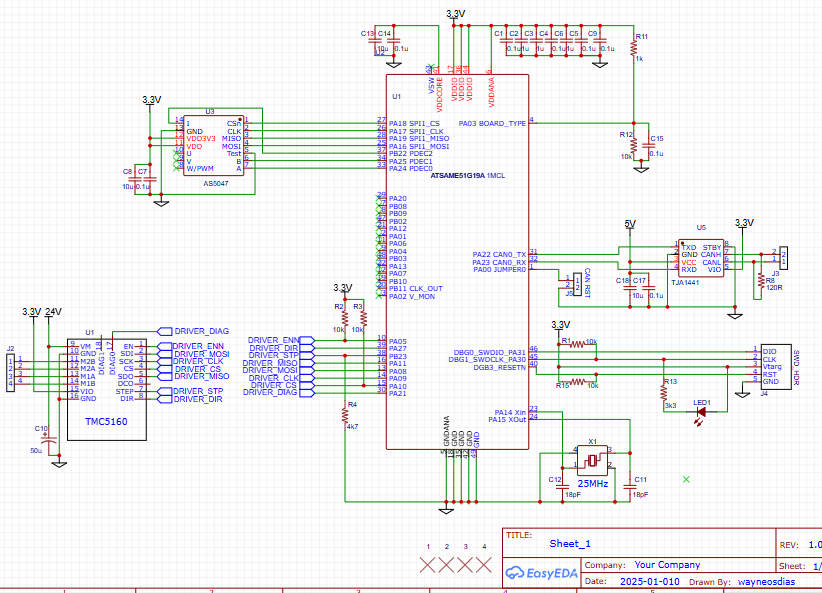
") ). I got it all working. It took another board rev as I had a couple hw hiccups. This included to swapping the MAX3051 to the TJA1441A CAN xcvr per David's #2 note. Any rate, brand new mcu flashed the bootloader first go. I had to first set the fuses as I listed above. The default fuses had several differences, but I didn't note them.
). I got it all working. It took another board rev as I had a couple hw hiccups. This included to swapping the MAX3051 to the TJA1441A CAN xcvr per David's #2 note. Any rate, brand new mcu flashed the bootloader first go. I had to first set the fuses as I listed above. The default fuses had several differences, but I didn't note them.