Independent Z with Independent Sensors U steps/mm wrong
-
A whole bunch of months ago, I retrofitted my Promega to have dual Z lead screws with independent sensors for homing. Then I had so many issues with the Maestro board skipping steps, the extruder system behaving badly, and a work trip that kept me busy for several months.
I'm back to it now, I've redesigned the X carriage, swapped in a Duet WiFi that I had lying around while waiting for the Duet 3 and I've got everything pretty much back to working but the Z homing is behaving weird.
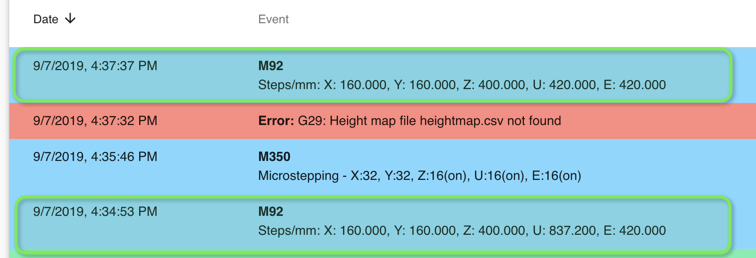
I set the U axis at the same steps/mm as Z but in the commented out line the U axis gets 837.20steps/mm and E0 gets 420. When use the second option where I try to set U to 400 after the fact, I get U and E as 420.

[0_1567892760893_MonkeyMega-Config-2019-09-07.zip](Uploading 100%)I'm on firmware 2.03 and, at this point, I'm at a complete loss as to what to do. I can try putting some overrides in the homez file but I'd rather find out if I'm doing something wrong first!
-
Here is a dropbox link to my config:
https://www.dropbox.com/s/a6954n6rumxr327/MonkeyMega-Config-2019-09-07.zip?dl=0 -
I think you may need to define U in your M584 command? And I'm not sure but I think it should be P4 instead of P3.
I don't personally use multiple independent motors for Z, so I could be wrong.
I'm sure you've seen this, but maybe a good idea to go over it once more and try to follow the examples.
https://duet3d.dozuki.com/Wiki/Bed_levelling_using_multiple_independent_Z_motors
-
Hi,
That article that Phaedrux referenced makes no mention of creating other axes.
So I think there may be something amiss in your configuration.
Frederick
-
Just to make it clearer what is happening when homing Z
; homez.g ; called to home the Z axis ; ; ============= PRE-HOMING ===================== ; Ignore Machine boundaries M564 H0 S0 ; Turn off bed leveling during homing G29 S2 ; Does the same as M561! G29 S2 ; Do it twice because once just isn't enough ; Switch to Origin Tool T0 ; Relative positioning G91 ; Provide Z height clearance G1 Z10 F250 S1 ; =========== Reconfigure axes ========= M584 Z2 U4 P4 ; Split Z into 2 (Z+U) ; =========== set U axis current ====== ;M906 U1200 I60; Set motor currents (mA) and idle current percentage ; ============ HOME Z ============== ; Rapid Z+U until limit switch triggers G0 Z450 U450 F1500 S1 ; Back off to release limit switch G1 Z-5 U-5 F120 S2 ; Slow advance to trigger limit switch G0 Z20 U20 F120 S1 ;Offset U before merge to level platform - again ;Offset not needed due to tuned sensor flags. ;G1 U-0.5 F1000 ;Merge U and Z again M584 Z2:4 P3 ;Move back again 5mm in -z direction G1 Z-5 F1500 S2 ;Set actual z-height (might be able to do this in config as part of default height. G92 Z322.3 U322.3 ; ============ Post-Homing ============== ; Revert to absolute coordinates G90 ; Re-enable mesh leveling G29 S1 ; Stop movement across limits, enable boundaries, homing requirement M564 H1 S1 ; -
The ProMega config setup is a little unorthodox in my opinion. There have been a few other threads trying to sort through it in the recent past.
Have you seen this? https://promega.printm3d.com/documentation/software-firmware/adjust-homing-macros
-
Check that in config.g you have a M584 command that creates the U axis and also redefines the E drivers, earlier than your M350 and M906 commands. I'm using a smartphone so it's not easy for me to look at the config.g that you uploaded.
-
I think the problem is that the u axis isn't created until the homing files as it's missing from the m584 in the config.g
-
@phaedrux said in Independent Z with Independent Sensors U steps/mm wrong:
I think the problem is that the u axis isn't created until the homing files as it's missing from the m584 in the config.g
In that case the U motor will still be set up as an extruder, and the microstepping and motor current will be set as for the extruder. So if E microstepping is different from Z microstepping, that would explain the symptom
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@phaedrux said in Independent Z with Independent Sensors U steps/mm wrong:
https://duet3d.dozuki.com/Wiki/Bed_levelling_using_multiple_independent_Z_motors
Yes, that's what I based my config on!
-
-
@phaedrux There's no reason to treat this like a Promega. I've gutted it, changed the Z drive system to dual lead screws, the rails, the carriage, the board, the bed...
-
Defining U in config.g before then combining worked for me. Thanks for the help!
-
@leonmf said in Independent Z with Independent Sensors U steps/mm wrong:
Defining U in config.g before then combining worked for me. Thanks for the help!
Hi,
What is the reason for end stop switches on both z axes?
Frederick
-
@fcwilt I believe it's used as an X axis leveling mechanism.