Hypercube Fusion movement help
-
@Veti said in Hypercube Fusion movement help:
@RAM said in Hypercube Fusion movement help:
The ones I think the thermistors are these 100K ohm NTC 3950FB
That would be B3950 C0.
Thanks for the info, I have been tinkering with the firmware and also looking through @Phaedrux config to try and figure bits out as well as using some of his bits from his macro files
 especially liked the start up tune at the end of the config.g file (I know little things please little minds).
especially liked the start up tune at the end of the config.g file (I know little things please little minds).I have managed to get the printer fully connected with all the bits I am going to be using such as the extruder, hotend & z-probe which I didn't before as I was still printing out the last parts that I needed to get them mounted.
I got the motors, endstops and probe working and even tuned the hotend and heated bed, So I am heading in the right direction at least now thanks to you guys.
Even though I followed the tuning guide to the letter with all the steps and it looked like everything was in the green, when I set the temp it shots past the target before it even tries to let itself settle. E.G if I set the hotend temp to 100c it will hit 110c before it starts to come back down to the set target temp, As where the heated bed seems to be fine. E.G set it to 60c it hits 60.5 and stablizes.
Is that normal for the hotend to do what it is doing or did I do something wrong when I tuned the hotend heater?
This is what I get when sending the M307 H1 & H0 commands which I did save using M500 after each tune had completedM307 H1 Heater 1 model: gain 468.5, time constant 118.3, dead time 9.5, max PWM 1.00, calibration voltage 24.0, mode PID, inverted no, frequency default Computed PID parameters for setpoint change: P4.7, I0.142, D31.6 Computed PID parameters for load change: P4.7, M307 H0 Heater 0 model: gain 146.6, time constant 334.8, dead time 0.7, max PWM 1.00, calibration voltage 23.5, mode PID, inverted no, frequency default Computed PID parameters for setpoint change: P582.4, I38.041, D285.4 Computed PID parameters for load change: PIf I also run any macro to pre-heat bed and hotend temps I get this warning.
M98 P"0:/macros/PRE-HEAT/Pre- Heat PLA" Warning: Heater 1 appears to be over-powered. If left on at full power, its temperature is predicted to reach 493C.Also is there a way to force the X - axis to home before the Y and make the Y - axis wait for the X to be homed before the Y - axis can home as I am using optical sensors and they are both in the same corner, if I press the home all button it causes them to collide and I would like to avoid this if possible.
I have added my whole Config in zip format if it will help.
-
@RAM said in Hypercube Fusion movement help:
Warning: Heater 1 appears to be over-powered. If left on at full power, its temperature is predicted to reach 493C.
What do you have in the pre-heat pla macro?
The warning is to warn you that your heater could reach that temp if it entered a fault state where full power was applied without control. It's a warning to prompt you to take precautions. Always keep an eye on your printer. Have fire suppression nearby. Get a smoke detector. Consider a lower wattage heater cartridge.
@RAM said in Hypercube Fusion movement help:
Also is there a way to force the X - axis to home before the Y and make the Y - axis wait for the X to be homed before the Y - axis can home
Yes, you can define how the homing process proceeds in the homeall.g file.
-
@Phaedrux the PLA settings macro I got from your config and changed the values so that they matched my heaters
; Raise temp of heated bed to 60 and nozzle to 190 ; ; New values M307 H1 A468.5 C118.3 D9.5 S1.00 V24.0 B0 ; Hotend PID tune for 210c M307 H0 A146.6 C334.8 D0.7 S1.00 V23.5 B0 ; Bed PID tune for 90c T0 G10 P0 S190 ; Set extruder temp (tool 0) to 190 M140 S60 ; Set bed temp to 60 M116 ; Wait for temps to be reached... M117 PLA Preheat complete ; and send a notice to the screen that temps have been reached ;Play a tone M300 S1250 P200 G4 P201 M300 S1500 P200 G4 P201 M300 S1100 P200 G4 P201 M300 S950 P300 G4 P400 M300 S1175 P300 G4 S1All of the Pre-heat macros are the same just different bed and hotend temps set and after the M117 it says either PLA, ABS or PETG
I have a smoke detector and the printer is about 4 feet behind me but you are right I should buy a fire extingusher just incase the worst ever did happen.
As for the homeall.g file what would I need to do with it as I have not a clue in which way to format it.
How did you manage to do the sound file whilst you are about lol
-
@RAM said in Hypercube Fusion movement help:
; New values
M307 H1 A468.5 C118.3 D9.5 S1.00 V24.0 B0 ; Hotend PID tune for 210c
M307 H0 A146.6 C334.8 D0.7 S1.00 V23.5 B0 ; Bed PID tune for 90cSo it's giving the warning because you are setting the values for the heaters. So it's just telling you that based on those values the heater model indicates that it has the potential to reach that temp if left at full uncontrolled power.
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v2.1.8 on Sun Jan 26 2020 18:02:23 GMT+0000 (Greenwich Mean Time) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-315 F1800 ; move quickly to X or Y endstop and stop there (first pass) G1 X5 F6000 ; go back a few mm G1 H1 X-315 F360 ; move slowly to X axis endstop once more (second pass) G1 H1 Y-325 ; home Y axis G1 Y15 F6000 ; go back a few mm G1 H1 Y-315 F360 ; move slowly to X axis endstop once more (second pass) G90 ; absolute positioning G1 X-18 Y15 F6000 ; go to first bed probe point and home Z G30 ; home Z by probing the bedNotice how I've split the X and Y movement so that it will home X first, then home Y after.
You may want to change the location before the G30 so that it's at the center of the bed for homing Z.
@RAM said in Hypercube Fusion movement help:
How did you manage to do the sound file whilst you are about lol
Way too much time playing tones in the console and composing little tunes.

-
@Phaedrux said in Hypercube Fusion movement help:
So it's giving the warning because you are setting the values for the heaters. So it's just telling you that based on those values the heater model indicates that it has the potential to reach that temp if left at full uncontrolled power.
I thought that was the settings after the tuning was done which was the correct settings to be using so that it wouldn't overshot the temp that was set or am I totally lost again ?
As for the homeall.g file settings I didn't think of doing all of the X-Axis moves 1st then the Y.
If I wanted to have the nozzle in the center of the bed before homing the Z I take it that I change the current setting to the co-ordinates that are showing on the DWC for the X & Y axis so instead of it being;orignal values ;G1 X-18 Y15 F6000 ; go to first bed probe point and home Z ;new values G1 X 146 Y 130 F6000 ; go to first bed probe point and home Z (bed center)Is that correct in the way that I am reading and understanding the gcode ?
How much $$ to do the star wars for the dark side theme

-
@RAM said in Hypercube Fusion movement help:
@Phaedrux said in Hypercube Fusion movement help:
So it's giving the warning because you are setting the values for the heaters. So it's just telling you that based on those values the heater model indicates that it has the potential to reach that temp if left at full uncontrolled power.
I thought that was the settings after the tuning was done which was the correct settings to be using so that it wouldn't overshot the temp that was set or am I totally lost again ?
Yes those settings are fine. The warning just pops up any time that command is executed just to let you know.
As for the homeall.g file settings I didn't think of doing all of the X-Axis moves 1st then the Y.
If I wanted to have the nozzle in the center of the bed before homing the Z I take it that I change the current setting to the co-ordinates that are showing on the DWC for the X & Y axis so instead of it being;orignal values ;G1 X-18 Y15 F6000 ; go to first bed probe point and home Z ;new values G1 X 146 Y 130 F6000 ; go to first bed probe point and home Z (bed center)Is that correct in the way that I am reading and understanding the gcode ?
Yes that looks correct.
How much $$ to do the star wars for the dark side theme
You mean Vader's theme?
-
@Phaedrux Yep the Vadar theme, just think it would be fun to have as a print complete theme. Haven't a clue on how I would implement it unless I put it in the code area of simplify3d.
As for that heater warning when I run the macros does it really need to be in there ?
And is there a way that I can sort out the heating issue on the hotend from over shooting the target so much as it worries me if I have to print PETG and it needs to be set to 240c. Could it be due to a cheap heater cartridge?
-
@RAM said in Hypercube Fusion movement help:
As for that heater warning when I run the macros does it really need to be in there ?
Do you mean, do the commands really need to be in there? Not really. It depends how different the tuning results are for different temperatures. You'd still get the warning at boot time when the default commands are executed.
And is there a way that I can sort out the heating issue on the hotend from over shooting the target so much as it worries me if I have to print PETG and it needs to be set to 240c. Could it be due to a cheap heater cartridge?
If you run the PID tune for the temperature you'll be using it shouldn't overshoot by much. Check that the cartridge and thermistor are tightly secured in the block.
-
@Phaedrux ok thanks I will try running the hotend tune again at 240 to see if it behaves better.
-
Ok I run the tuning again @ 240c and this is what it comes back with.
Warning: Heater 1 appears to be over-powered. If left on at full power, its temperature is predicted to reach 558C. Auto tune heater 1 completed in 218 sec Use M307 H1 to see the result, or M500 to save the result in config-override.g 28/01/2020, 18:35:41 Auto tune phase 3, peak temperature was 258.3 28/01/2020, 18:35:31 Auto tune phase 2, heater off 28/01/2020, 18:34:10 Auto tune phase 1, heater on 28/01/2020, 18:34:04 M303 H1 S240 Auto tuning heater 1 using target temperature 240.0°C and PWM 1.00 - do not leave printer unattendedis there a way that if the heater goes beyond a certain temp that it will shutdown automatically, or is that what the temp limit setting does when you go through the RRF config tool ?
apparently the heater cartridge that I have is capable of 350c but I don't want it going that high obviously as I only have the V6 clone but I am hoping to upgrade to the new E3D Hemera but I can't find a mount that works with my build of the hypercube as I am using rails for the X & Y axis. (Should have stuck to the original plans
) -
@RAM Yes there is a temperature limit set
M143 H1 S280 ; set temperature limit for heater 1 to 280CBut that only applies when the duet is in control. The warning is about what would happen if the duet failed in such a way that the heater was fully powered. The warning is just informational to let you know what you're dealing with.
Are you using M500 after the tuning to save the results?
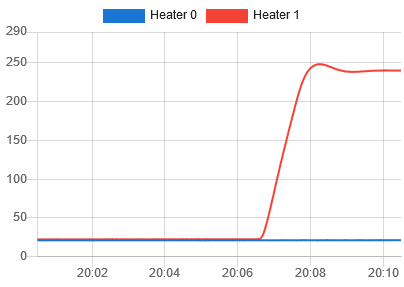
Now that you've tuned for 240 what does the temp graph look like when you set it to 240?
Did you start the tuning process from room temperature?
It's also a good idea to have the print cooling fan running at the same speed you'd normally be using during a print. Which for PETG may be next to nothing, but for PLA might be quite a lot. That's another reason why it may be beneficial having different tunes loaded for different temps, especially if you don't have a nozzle sock.
-
@Phaedrux Yep I am using M500 after the tuning is done to save it but I think I might not have checked the Read config-override.g file at end of startup process when I was doing the config.
It doesn't seem to shoot past 240c to much now I think it was about 8c more as where before it was going almost 18c above so that is an improvement at least.
Always done the tuning at room temp and with the part cooling fan set to 100% and even when I have been doing the pre-heat just as a test the part fan has been on 100%
I do have a silicon sock fitted too, how can I store different tunes for different temps or would I just run the tune for each filament temp that I would need and just store it in the pre-heat macro for that type of filament ?
If you think it might be better to just buy genuine heater cartridge and thermister I will do that as I don't want to be pulling the printer apart every 5 mins as I have a HicTop that is like that and I cannot be dealing with that again
-
8c overshoot isn't too bad. It does seem to level off nicely after that. A genuine cartridge and thermistor may help. I'm always a fan of the quality option.
how can I store different tunes for different temps or would I just run the tune for each filament temp that I would need and just store it in the pre-heat macro for that type of filament ?
Exactly. If you use the preheat macro consistently, you could have the tuned settings in there. If you use PrusaSlicer you can even use the filaments gcode section to load the settings for each filament automatically. I think it's too bad that more slicers don't allow for that.
There is also the DWC filaments functionality that would let you automate the filament loading and unloading behaviour and you could have different tuned values loaded there.
But yes, using the preheat macro to load the values would be the most straight forward.
-
@Phaedrux oh if that seems ok with the overshoot margin I will stop worrying then, I will have to wait till payday but will definately buy the genuine heater and thermister and use that till I can find a mount for the Hemera.
I will set about doing the tuning for each filament and get the macros changed to the correct values for each one.
I did also start to do the macros for the filaments in the DWC too.I just hope my 1st test print doesn't explode the printer into bits.
-
I wouldn't worry about the overshoot as long as the temp holds steady.
I wouldn't even worry too much about having specific tuned values for each temp. If you print PLA at 200 and PETG at 240, you could split the difference and tune to 220 and have very good results. As long as the heat up time is quick, the overshoot isn't too bad, and the temps are stable during use I would call it good.
More important would be having accurate thermistor values giving you accurate temp readings to begin with. That's where a good quality thermistor like the Semitec from E3D that gives you actual values to use makes the most difference. The fit and finish of the cartridges also ensure good physical connection to the heater block.
-
@Phaedrux changed the tune but also just purchased the E3D gold V6 which I will change out as soon as it arrives.
I think I have everything else setup correctly but there is 2 things I would like to change if possible.
I would like to add the original Z axis optical sensor to the bottom of the bed movement so that will stop the bed from going any further. Is that something that is possible to do even though I am using the a Z probe as the bed leveling and endstop ?
The other thing I would like to change is how fast the Z axis actually moves as I put the bed to the bottom the other day and hit home and it took almost 4 mins to home which is way to long for my liking but I am not sure what I need to change in the config or home files.
-
@RAM said in Hypercube Fusion movement help:
The other thing I would like to change is how fast the Z axis actually moves as I put the bed to the bottom the other day and hit home and it took almost 4 mins to home which is way to long for my liking but I am not sure what I need to change in the config or home files.
Here is a copy and paste from my homeZ which does exactly that.
; FAST home Z
G1 Z-740 F450 H1; Lower bed again
G91 ; relative
G1 Z5 F300 ; lower bed 5mm again
G90 ; back to absolute;Slow home Z
G1 Z-10 F60 H1You'll need to play around with those values but hopefully you get the idea.
Or if you use a Z probe, you can change the speed using M558. So in the above example, for fast homing use M558 F450 then for the slow homing use M558 F60 ( or whatever speeds you want).
-
@deckingman thank you very much for that.
-
@RAM said in Hypercube Fusion movement help:
I would like to add the original Z axis optical sensor to the bottom of the bed movement so that will stop the bed from going any further. Is that something that is possible to do even though I am using the a Z probe as the bed leveling and endstop ?
Technically the endstop will only stop movement during a homing move. You could setup the switch to act as an emergency stop though, but if the M208 is set correctly, the firmware will prevent moving the axis beyond the maxima anyway.
It can be handy to have a Zmax endstop in combination with a probe because it allows you to home the Z axis after a power failure and a print on the bed prevents you using the probe.
Here's an example of doing just that with an Ender 3.
As for the speed of your Z axis, from your config.g it looks like you're using the default values which are very conservative for safety.
M566 Z12.00 ; set maximum instantaneous speed changes (mm/min) M203 Z180.00 ; set maximum speeds (mm/min) M201 Z20.00 ; set accelerations (mm/s^2)Try these settings
M566 Z60.00 ; set maximum instantaneous speed changes (mm/min) M203 Z600.00 ; set maximum speeds (mm/min) M201 Z200.00 ; set accelerations (mm/s^2)You'll need to make these changes to the limits before you'll be able to use higher speeds the way Deckingman shows.
-
@Phaedrux Thanks I will change the values once I get my head round the bed mesh leveling which is bending my brain at the moment. but on the plus side thanks to you and everyone else in the Duet forum that has been so helpful I am hoping I will be able to do my 1st test print this weekend.