Help needed with Duet 3 6hc TMC5160 StealthChop config
-
Do you realize the speeds are in mm/min?
So F119 is very slow -
yes like I wrote.
all above 119mm/min goes to spreadcycle
also with V34 (110mm/s) parameter in M569.
and I can not understand why, it looks like the V parameter does not realy change the tpwmthrs.
but when I check this with m569 P0 as example it gives me
Drive 0 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 56, tpwmthrs 34 (110.3 mm/sec) , thigh 200 (18.8 mm/sec)
so it sould be on 110mm/sec and not 2mm (120mm/min) /sec
I have still not understand what the H parameter (thigh 200 (18.8 mm/sec)) means maby someone can explain it.
maby someone can explain it.
I have tried higher H and lover H parameter nothing changed for me.
when I search for "stealthchop" in the Forum it looks like some others has the same problem, but not found a solution for. -
has some bring StealthChop running on a Duet 3?
when I search here in the forum it looks like only problems with a maestro was fixed the issues with the duet 3 looks all
still open.
has someone the maestro running with RR 3?
@dc42 do you have some tips that I can try or what is wrong with my configuration? -
I am not aware of any bugs in this area, but have added this to my list of things to test prior to the 3.01 release of RRF.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 this means I have nothing wrong in my config?

I was hoping that I have done something wrong. -
I don't see anything wrong with your config, and M569 P0 says the threshold speed for changing to spreadCycle should be around 110mm/sec. That speed won't be exactly right because it depends on the accuracy of the 12MHz clock in the TMC5160.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 ok then I have to wait for your tests and hope we can find a solution.
let me know when I can help here with testing etc. -
From my reading of the datasheet, you should always have THIGH < TPWMTHRS. Have you tried setting THIGH to values below 34?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in Help needed with Duet 3 6hc TMC5160 StealthChop config:
THIGH
I think I had done is the H parameter right?
I will try again. -
@danym21 said in Help needed with Duet 3 6hc TMC5160 StealthChop config:
@dc42 said in Help needed with Duet 3 6hc TMC5160 StealthChop config:
THIGH
I think I had done is the H parameter right?
I will try again.Yes. Use M569 with just a P parameter to check that you have set it.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I have tried with H10 for X and Y achses (P0.0 and P0.1) nothing changed, StealthChop only works below F119 all above only Spreadcycle from the noise.
M569 P0.0 Drive 0 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 548, tpwmthrs 34 (110.3 mm/sec), thigh 10 (375.0 mm/sec) M569 P0.1 Drive 1 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 884, tpwmthrs 34 (110.3 mm/sec), thigh 10 (375.0 mm/sec)to be sure also tested :
; Drives M569 P0.0 S0 D3 V34 H50 ; physical drive 0 goes forwards D2=Spread cycle (x-achses) M569 P0.1 S0 D3 V34 H50 ; physical drive 1 goes forwards D2=Spread cycle (y-achses)13.5.2020, 22:17:07 M569 P0.1 Drive 1 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 972, tpwmthrs 34 (110.3 mm/sec), thigh 50 (75.0 mm/sec) 13.5.2020, 22:17:01 M569 P0.0 Drive 0 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 540, tpwmthrs 34 (110.3 mm/sec), thigh 50 (75.0 mm/sec) 13.5.2020, 22:16:07 G0 X130 Y130 F90 13.5.2020, 22:15:51 G0 X135 Y135 F90now also G0 X130 Y130 F90 runs only in SpreadCycle
-
@dc42 was you able to test?
I have also tried to change the D settings on a test print to hear some changes, but nearly nothing has changed only on D0 (constant off-time)
he goes a little bit louder but not much. D1 (random off-time) is not supported by TMC5160.
can it be that my board is faulty or that the Firmware has a Bug and only shows the corect mode but not send to the stepper drivers? -
I have seen the source code "/src/Movement/StepperDrivers/TMC51xx.cpp"
constexpr float SenseResistor = 0.050;when I right on other firmware´s I use 0.075, can this create a difference?
Is it possible to play with over the M569 command or is it needed to compile new, have not found in the Duet documentation. -
I'm experiencing the same thing @danym21.
-
Are there any updates on this?
-
@cjackson234
still not -
I'm sorry for the delay. This is still on my list to continue investigating. As it's a noise issue not a functionality issue, it has lower priotity then some others on my list.
-
Hello! The same thing on my CoreXY using Duet3. Does anyone have found a solution?
-
no sorry
-
My suspicion is that the issue is not following the tuning sequence specified by Trinamic. In particular, you are supposed to energise the motors, keep them still for a short while (but less than 130ms), then execute a medium speed move such as a homing move. Here is an extract from the datasheet:
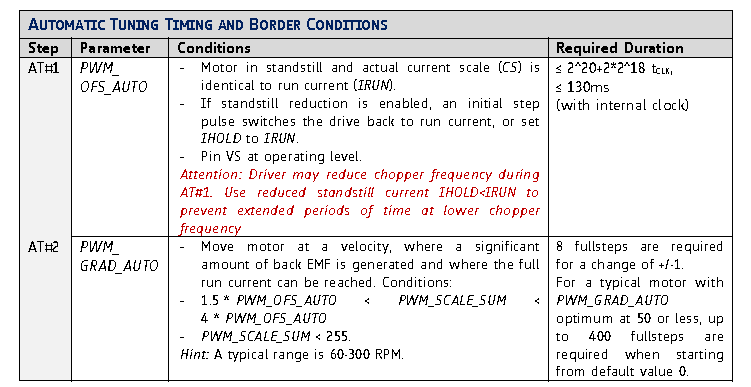
Typically, homeall.g does something like this:
G91
G1 H2 Z5 Fxxx
G1 H1 X-400 Fxxx
...The initial pause at standstill is after powering up the motors is not present. So perhaps this would be better:
G91
G1 H2 Z0.02 Fxxx
G4 P50
G1 H2 Z5
G1 H2 X0.02 Fxxx
G4 P50
G2 H1 X-400Similarly for Y. The 0.02mm figure should be adjusted so that it is at least one microstep, but preferably not much more than that.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com