'Jumpy' X/Y movement on Maestro
-
Stutter like that is usually because of low jerk on Z and having mesh compensation active. Low E jerk may also contribute when using pressure advance and could be triggered by the model/gcode as well.
What slicer are you using? there was a bug in a recent version of Cura that has since been fixed that caused stuttering. Updating Cura to 4.6.1 fixes it.
-
CURA but I am on 4.6.1.
I think your correct on the mesh. Upping these values has smoothed it out but not corrected it.
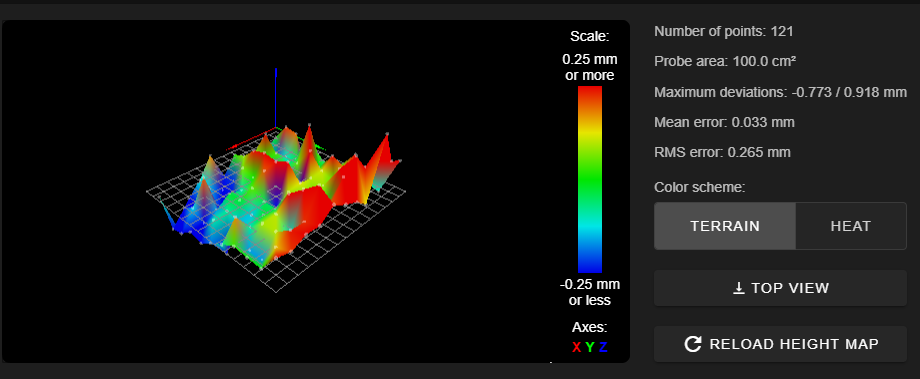
Just checked my latest mesh and it does look like a mountain range for some reason. Can't get my head around the scale of this though, is the deviation on this significant?
Using differential IR sensor on glass bed.
-
@dm86 you have driver 4 not defined with M569, but use it in M584 for Z. After correction some of the errors may go away.
-
I suggest you clean the bed really well before redoing the heightmap. It will pick up all the glue gunk.
You can also add a taper off for the compensation.
https://duet3d.dozuki.com/Wiki/Gcode#Section_M376_Set_bed_compensation_taper
-
@dm86 you could also check whether the M906 setting for x and y motors 1800 is not too high. It should be about 50 to 80 % of the stepper current, please check documentation.
The M92 setting of 200 for x and y seem strange to me, do you have 400 step per round stepper (0.9 degree) with 16 teeth pulley? Otherwise 200 could be wrong.
-
This post is deleted! -
Thanks all,
Will have another go today and report back.
@JoergS5 said in 'Jumpy' X/Y movement on Maestro:
@dm86 you have driver 4 not defined with M569, but use it in M584 for Z. After correction some of the errors may go away.
Good spot. I don't think it will make a difference but will correct and see. Thanks.
@JoergS5 said in 'Jumpy' X/Y movement on Maestro:
@dm86 you could also check whether the M906 setting for x and y motors 1800 is not too high. It should be about 50 to 80 % of the stepper current, please check documentation.
The M92 setting of 200 for x and y seem strange to me, do you have 400 step per round stepper (0.9 degree) with 16 teeth pulley? Otherwise 200 could be wrong.
Your right on the currents. I'm not sure how accurate they are though. They are 2A steppers but if I go lower they start to miss steps. I used a Duet2 Wifi on here before and had them quite a bit lower with no issues.
M92 is correct, that is what I have. Dimension accuracy is spot on.
-
Thanks all.
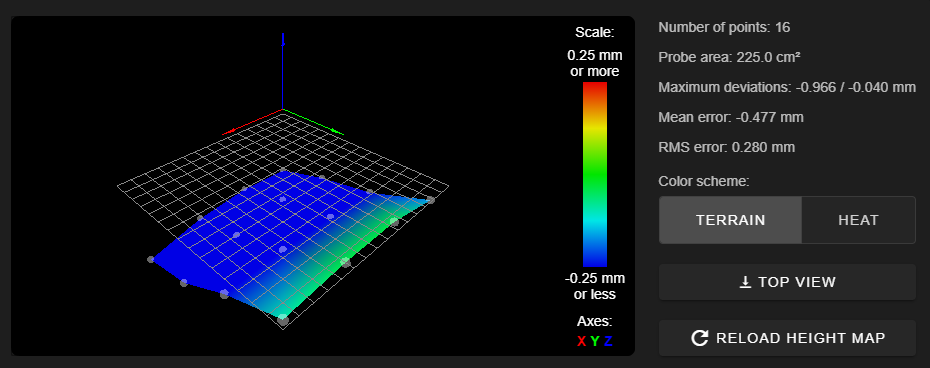
Problem solved. Was combo of dodgy bed mesh caused my loose mounting screw on sensor & low Z jerk.
Simplified the mesh too as being glass its pretty flat, just often on a tilt.
-
@dm86 your tilt could be due to different stepper positions of the Z steppers, when you power on.
-
You may want to try this: https://duet3d.dozuki.com/Wiki/Bed_levelling_using_multiple_independent_Z_motors
-
@Phaedrux Thanks. I did but had real trouble getting it to work reliably. However that was using a capacitive sensor and was my main reason for changing to IR.
My X is usually fairly stable anyway. Its my Y that I have issues taking the tilt out of.