Duet2 Wifi PanelDue serial passthrough with Arduino Due
-
have you seen https://github.com/Duet3D/CNC-Pendant-Firmware ?
-
In addition to @bearer here is the topic where all originated:
https://forum.duet3d.com/topic/11389/cnc-style-pendant
I have one of these with a modified Arduino Nano (a SMD resistor has to be changed) working together with the Panel Due. It makes a world of a difference how easier it is now to jog around...
-
@bearer
Yes i read this topic many many times, tried to understand the "passthrough" code but a bit too complicated for me.
I have build a pendant with joystick and buttons that works.
The only thing that doesn't work is the passthrough for continuing to use the PanelDue.
I also tried to weld the Duet_TX to Panel_RX (so bypassing the Arduino), it is better but have no correct return (current position, etc) so i would to implement the thing using code to be transparent. -
@Olivimages when you say "it doesn' work", what do you mean exactly? it does not move? it moves erratically?
Could you eventually post a wiring diagram of what you have done as well as the code? otherwise, we will be trying to troubleshoot a black box...
-
@FelixH
Sorry, i found that a wire was broken, so now everything work perfectly")
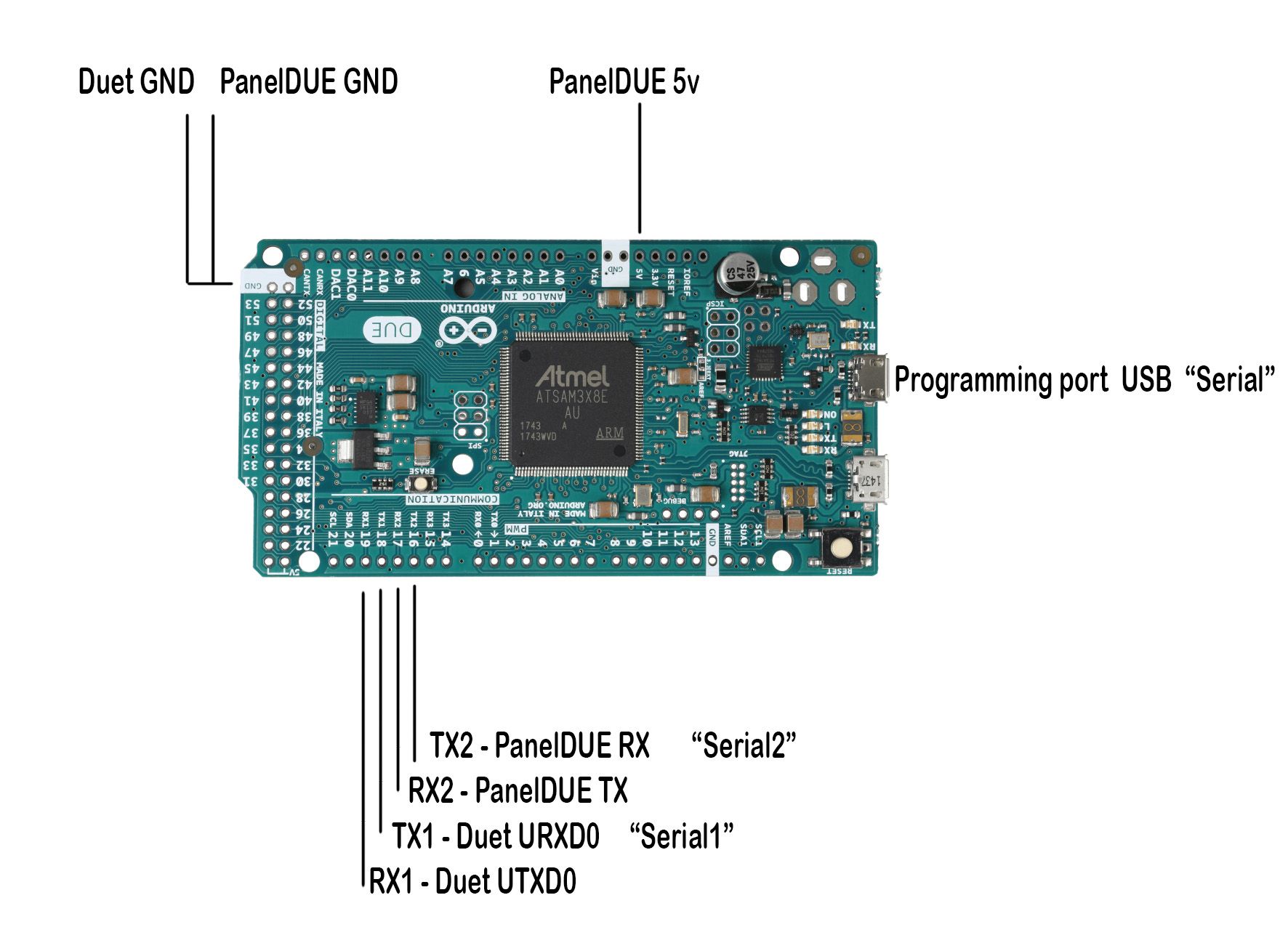
Here is the wiring
And the complete code, simplified to make first the passthrough functioning before adding the joystick code. I will post the complete code with a photo of the joysticks when it will be finished.
/* Workbee pendant */ void setup() { Serial1.begin(57600); Serial2.begin(57600); Serial1.print("M111 S1 P3\n"); // Start debug mode on USB Serial1.print("M575 P1 B57600 S0\n"); // Serial port without checksum Serial.begin(57600); // echo to Programming port for Serial Monitor } void loop() { // read from port 1, send to port 2, transmit from Duet to PanelDUE while (Serial1.available() > 0) { int inByte = Serial1.read(); Serial2.write(inByte); Serial.print(char(inByte)); // echo to Serial Monitor } // read from port 2, send to port 1, transmit from PanelDUE to Duet while (Serial2.available() > 0) { int inByte = Serial2.read(); Serial1.write(inByte); Serial.print(char(inByte)); // echo to Serial Monitor } } -
@Olivimages said in Duet2 Wifi PanelDue serial passthrough with Arduino Due:
@FelixH
Sorry, i found that a wire was broken, so now everything work perfectlyI was just comparing codes here...
 glad you sorted it out. Something like that happened to me more than once!
glad you sorted it out. Something like that happened to me more than once! -
I tried this code, without storing the data in a variable it appears to react faster than before.
void loop() { // read from port 1, send to port 2, transmit from Duet to PanelDUE while (Serial1.available() > 0) { Serial2.write(Serial1.read()); } // read from port 2, send to port 1, transmit from PanelDUE to Duet while (Serial2.available() > 0) { Serial1.write(Serial2.read()); } -
@Olivimages said in Duet2 Wifi PanelDue serial passthrough with Arduino Due:
I tried this code, without storing the data in a variable it appears to react faster than before.
Possibly it's faster because you don't echo it and not because of the variable.
-
to increase the speed further skip past the arduni serial and write good old avr fashioned code in its place.
also having a while loop process all the bytes in the queue would favour one direction of the link, putting a limt on the number of bytes in each loop might balance things out?
-
Not to hijack but I'm working on something similar. I have a Duet 2 Wifi, Panel Due and 5 inch screen with firmware 2.04. I want to make a G Code Sender with a simple 16 button keypad. Each button will have an assigned G Code to send to the printer. I have spare Arduino Nano, Mini, and ESP8266 so I have some options.
-
@dhusolo if you have a PanelDue, why don't you just create macros??
-
@FelixH I've tried that but with the number of macros needed it would clutter the screen. I feel this would be easier during troubleshooting and I think it'll be pretty useful to others if I can get it working right.
-
@dhusolo said in Duet2 Wifi PanelDue serial passthrough with Arduino Due:
@FelixH I've tried that but with the number of macros needed it would clutter the screen. I feel this would be easier during troubleshooting and I think it'll be pretty useful to others if I can get it working right.
I have plenty of macros on my Duet CNC. I de-clutter them by using folders and sub-folders. Not to discourage you ore anything, but your problem has a much easier solution than an external Arduino Gcode sender.
-
@FelixH I completely agree, there's an easier way of doing it. Just sometimes it'd be easier if i had a handheld controller vs having to navigate the touchscreen
-
@dhusolo said in Duet2 Wifi PanelDue serial passthrough with Arduino Due:
@FelixH I completely agree, there's an easier way of doing it. Just sometimes it'd be easier if i had a handheld controller vs having to navigate the touchscreen
You can always have a look here:
https://forum.duet3d.com/topic/11389/cnc-style-pendant/122?_=1593623248420
remove all the code regarding the pendant (encoders, buttons, etc.) and just set what you want to do. Should be quite doable...
-
Hi all,
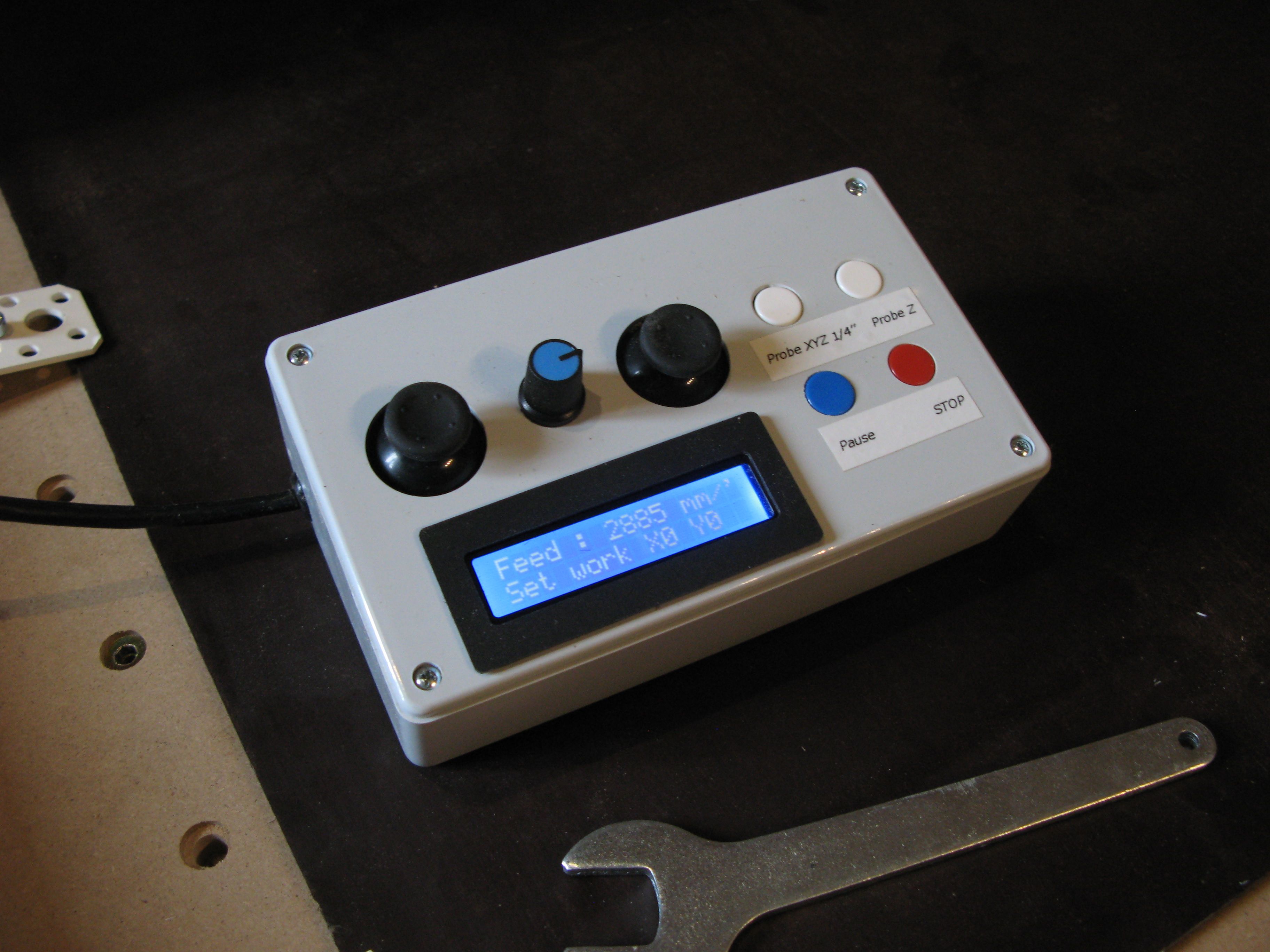
Here is the completed pendant/joystick

The potentiometer sets the feed speed for manual move
Left joystick for X and Y
Right Joystick for Z (up and down) and baby step Z (left and right)
Button on left joystick set work coordinate X Y to 0 while right joystick button set Z to 0.
Manual move occurs only when status is "Idle" and not processing.
Cable used is an ethernet cable with 8 wires, that insert between PanelDue and Duet, so Arduino is powered by Duet 5V.I have searched a lot for smooth movements. Pushing maximum joystick sends 5mm move at maximum feed speed.
Pushing just a bit moves % (from 0 to 100%) of 5mm move and feed speed.
There is a calculation for the move duration, and send only a new G1 code only when previous move is terminated.
I can post the code but i need to clean it before. -
@Olivimages That's pretty cool. Great job! are you planning on sharing the sketch and wiring diagram? I built a CNC pendant but I'd like to incorporate some of your features into mine.
-
Here is the sketch, need to be fine tuned but working very good already.
The wiring for serial is on this topic just above, wiring of joystick are on the Analog pins of arduino and buttons on Digital pins.
@dhusolo Let me know if you have remarks or improvement on the code, and show us your project.#include <LiquidCrystal_I2C.h> #include <Wire.h> #define COLUMS 20 #define ROWS 4 #define LCD_SPACE_SYMBOL 0x20 //space symbol from the LCD ROM, see p.9 of GDM2004D datasheet LiquidCrystal_I2C lcd(PCF8574_ADDR_A21_A11_A01, 4, 5, 6, 16, 11, 12, 13, 14, POSITIVE); /* Workbee CNC pendant Duet3d and PanelDue7i Olivier Dessy */ int PotX = 0; // Joystick X reading int PotY = 0; // Joystick Y reading int PotZ = 0; // Joystick Z reading int PotZB = 0; // Joystick Z babystep reading int PotF = 0; // Potentiometer Feed reading bool ButtonX = 0; // Button X joystick bool ButtonZ = 0; // Button Z joystick bool Button1 = 0; // Button 1 bool Button2 = 0; // Button 2 bool Button3 = 0; // Button 3 bool Button4 = 0; // Button 4 bool Button5 = 0; // Button 5 float X = 0.2; // X move float Y = 0.2; // Y move float Z = 0.200; // Z move float ZB = 0.002; // Z babystep move int F = 0; int PotFlcd = 0; String Buffer =""; String Move =""; // Instruction GCODE String Message =""; String Status =""; // I=idle, P=printing from SD card, S=stopped (i.e. needs a reset), C=running config file (i.e starting up), A=paused, D=pausing, R=resuming from a pause, // B=busy (e.g. running a macro), F=performing firmware update, O=Vin power low unsigned long startMillis; unsigned long currentMillis; unsigned long period=500; void setup() { pinMode(22, INPUT); pinMode(23, INPUT); pinMode(24, INPUT); pinMode(25, INPUT); pinMode(26, INPUT); pinMode(27, INPUT); Serial1.begin(57600); // Serial port to Duet3d Serial2.begin(57600); // Serial port to PanelDue // Serial1.print("M111 S1 P3\n"); // Start debug mode on USB Serial1.print(F("M575 P1 B57600 S0\n")); // Serial port without checksum for GCode commands Serial.begin(57600); // Programming port of Arduino Due for debug lcd.begin(16,4); lcd.setCursor(0,0); lcd.print("Feed : "); startMillis=millis(); // Start time } void loop() { if (Buffer.substring(2,8) == "status") { // If status received, extract status Status = Buffer.substring(11,12); } Serial.print(Buffer); // Print received message from Duet3d for debug Buffer=""; Readsensor(); // read the value from the sensor: period=(abs((max(abs(X),max(abs(Y),abs(Z+ZB)))/(F)*60.00*1000.00)*0.8)); // Wait for move to be terminated in ms if (abs(PotF-PotFlcd)>25) { // LCD Anti flickering, display only once when changed PotFlcd = PotF; Serial.print(String(PotFlcd)); lcd.setCursor(7,0); lcd.print(String(PotFlcd)+" mm/' "); } currentMillis=millis(); if ((abs(PotX) > 8 || abs(PotY) > 8 || abs(PotZ) > 15 || abs(PotZB) > 15) && (Status !="P") ) { // If one joystick is moved and machine not processing/printing F = PotF*(max(abs(PotX),max(abs(PotY),abs(PotZ)))/512.00); // Feed from 4% to 100% of F proportionnal to PotX if (F < 150) { F=150; } // Avoid divide by 0 // Feed min 150mm/min max 3500mm/min, from 4% to 100% of F proportionnal to PotX X = int((PotX)/100.00*10.00)/10.00; // Max potentiometer 512/100 -> X Y move of 5.12 mm max Y = int((PotY)/100.00*10.00)/10.00; Z = int((PotZ)/5000.000*1000.000)/1000.000; // Max potentiometer 512/5000 -> Z move of 0.10 mm max ZB = int((PotZB)/100000.000*10000.000)/10000.000; // Max potentiometer 512/100000 -> ZB move of 0.005 mm max period=(abs((max(abs(X),max(abs(Y),abs(Z+ZB)))/(F)*60.00*1000.00)*1)); // Wait for move to be terminated in ms if (currentMillis-startMillis>=period) { // Start new move only when move is finished String Move = "G91 G1 X"+String(X)+"Y"+String(Y)+"Z"+String(Z+ZB)+" F"+String(F)+"\n" ; Serial1.print(F("G91\n")); Serial1.print(Move); // GCODE send Serial.println(Status+" start="+String(startMillis)+" current="+String(currentMillis)+" delay="+String(period)+" PotF="+String(PotF)+" Move="+String(Move)); // Debug print startMillis=currentMillis; // Reset delay count for next move } } else { // If no joystick is moved do serial passthrough between Duet3d and PanelDue // read from port 1, send to port 2, transmit from Duet to PanelDUE while (Serial1.available() > 0) { Buffer = Serial1.readString(); Serial2.print(Buffer); } // read from port 2, send to port 1, transmit from PanelDUE tu Duet while (Serial2.available() > 0) { // Serial.print(char(Serial2.peek())); Serial1.write(Serial2.read()); } } // Read buttons and execute macros if (ButtonX == LOW ) { Serial1.println("M98 P""0:/macros/Set work X0 Y0"""); lcd.setCursor(0,1); lcd.print("Set work X0 Y0 "); delay(1000); lcd.setCursor(0,1); lcd.print(" "); } if (ButtonZ == LOW ) { Serial1.println("M98 P""0:/macros/Set work Z0"""); lcd.setCursor(0,1); lcd.print("Set work Z0 "); delay(1000); lcd.setCursor(0,1); lcd.print(" "); } if (Button1 == HIGH ) { Serial1.println("M98 P""0:/macros/Probe XYZ Left Front 6,35 tool"""); lcd.setCursor(0,1); lcd.print("Probe XYZ 6,35 "); delay(2000); lcd.setCursor(0,1); lcd.print(" "); } if (Button2 == HIGH ) { Serial1.println("M98 P""0:/macros/Probe Z"""); lcd.setCursor(0,1); lcd.print("Probe Z "); delay(2000); lcd.setCursor(0,1); lcd.print(" "); } if (Button3 == HIGH ) { Serial1.println("M98 P""pause.g"""); lcd.setCursor(0,1); lcd.print("Pause "); delay(2000); lcd.setCursor(0,1); lcd.print(" "); } if (Button4 == HIGH ) { Serial1.println("M98 P""stop.g"""); lcd.setCursor(0,1); lcd.print("Stop "); delay(2000); lcd.setCursor(0,1); lcd.print(" "); } } void Readsensor() { PotX = map(analogRead(A0),0,1023,-512,512)-8; // Offset of -8 joystick not at 0 at center PotY = map(analogRead(A1),0,1023,-512,512)-5; PotZ = map(analogRead(A2),0,1023,-512,512)+7; PotZB = map(analogRead(A4),0,1023,-512,512); PotF = map(analogRead(A3),0,1023,3500,150); // Feed min 150mm/min max 3500mm/min ButtonX = digitalRead(22); ButtonZ = digitalRead(23); Button1 = digitalRead(24); Button2 = digitalRead(25); Button3 = digitalRead(26); Button4 = digitalRead(27); } -
@Olivimages Are you using a normal pot(like a 10K/20K) or a rotary encoder?
-
@dhusolo said in Duet2 Wifi PanelDue serial passthrough with Arduino Due:
@Olivimages Are you using a normal pot(like a 10K/20K) or a rotary encoder?
I used normal pot, these one : https://www.gotronic.fr/art-module-potentiometre-gravity-dfr0054-19304.htm