D-Bot/CrusaXY mash up (CoreXY iDEX)
-
Another question while I think of it. Can you modify macros on the paneldue?
-
Anyone able to answer my two questions?
Thanks.
-
@Rushmere3D said in D-Bot/CrusaXY mash up (CoreXY iDEX):
Quick question, am I right in thinking if I want to run two Toolboards on a duet3 I also need a Distribution Board?
Thanks,
J.
Yes, you'll need a distribution board
@Rushmere3D said in D-Bot/CrusaXY mash up (CoreXY iDEX):
Another question while I think of it. Can you modify macros on the paneldue?
no, you can't
-
Thank you.
-
Hi all,
OK a bit of progress, the printer now has the second tool fitting and everything is wired up including now physical end stops rather than sensor-less.
Here a picture of it right now:

Thanks,
James.
-
Right so, I've been playing until someone can offer assistants.
I've got the printer to home each axis (via Home X, Y, U button) I added this line to the config.g under the M584 line.
M669 X1:1:0:0 Y1:-1:0:-1 Z0:0:1:0 U0:0:0:1However homing Z cause issues, the U axis is told to home which is does but then when X and Y move to 0,0 it;s trying to also move U but just skips steps because it is up to it's end stop. Any suggestions?
Thanks,
James.
Follow my adventures in 3D Printing, laser cutting and electronics. https://linktr.ee/Rushmere3D
-
@Rushmere3D said in D-Bot/CrusaXY mash up (CoreXY iDEX):
Quick question, am I right in thinking if I want to run two Toolboards on a duet3 I also need a Distribution Board?
Thanks,
J.
It's not essential, but it makes the wiring simpler and provides fused power for each tool distribution board.
-
@Rushmere3D said in D-Bot/CrusaXY mash up (CoreXY iDEX):
Right so, I've been playing until someone can offer assistants.
I've got the printer to home each axis (via Home X, Y, U button) I added this line to the config.g under the M584 line.
M669 X1:1:0:0 Y1:-1:0:-1 Z0:0:1:0 U0:0:0:1However homing Z cause issues, the U axis is told to home which is does but then when X and Y move to 0,0 it;s trying to also move U but just skips steps because it is up to it's end stop. Any suggestions?
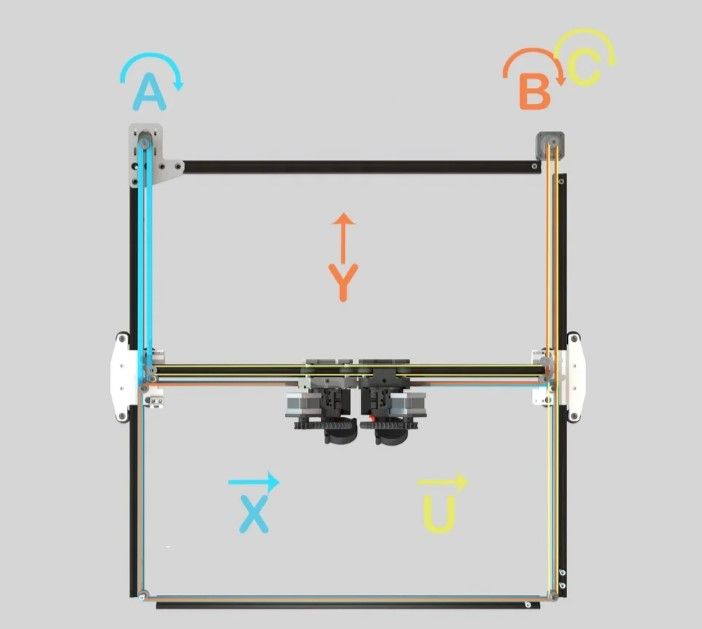
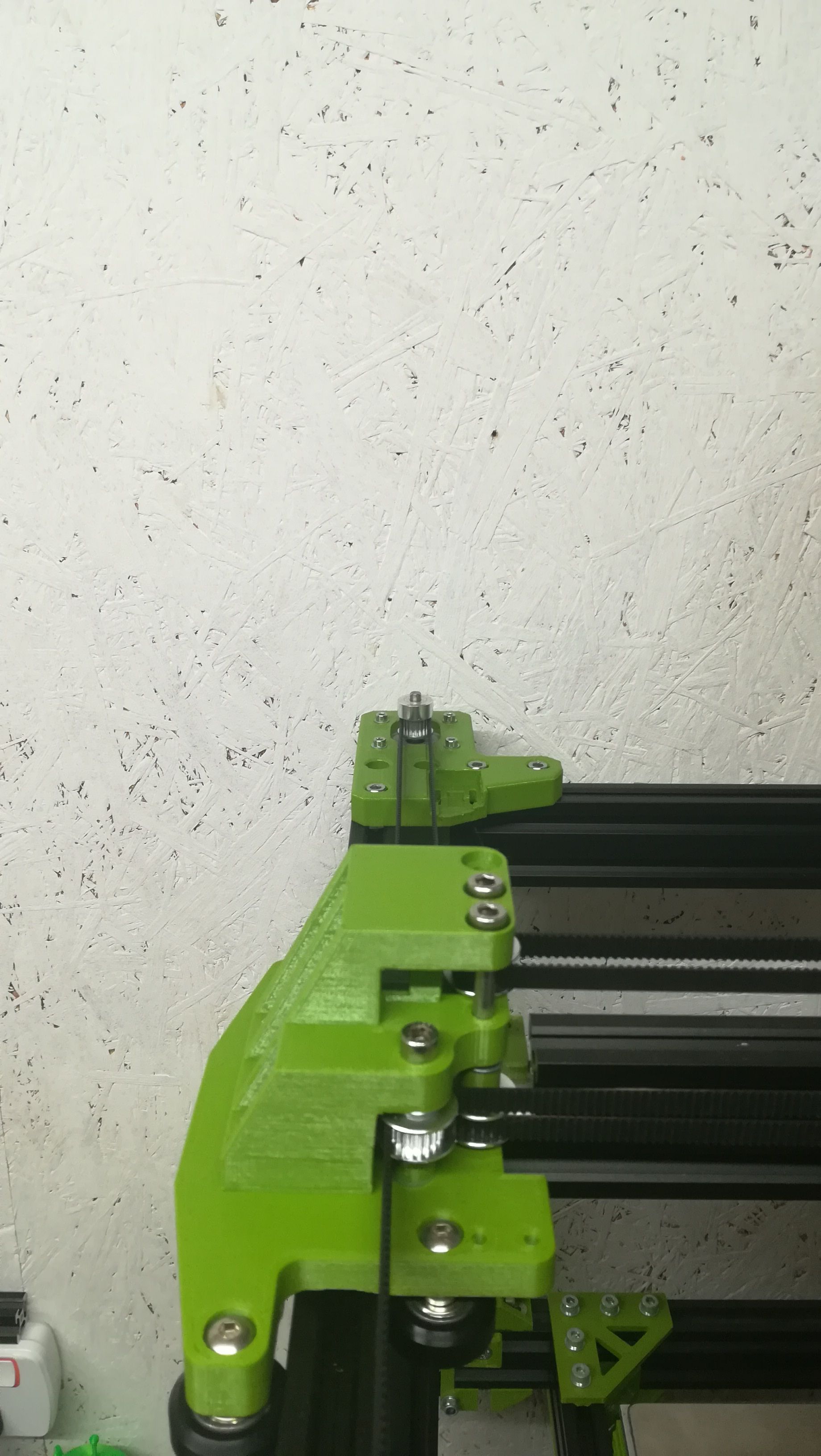
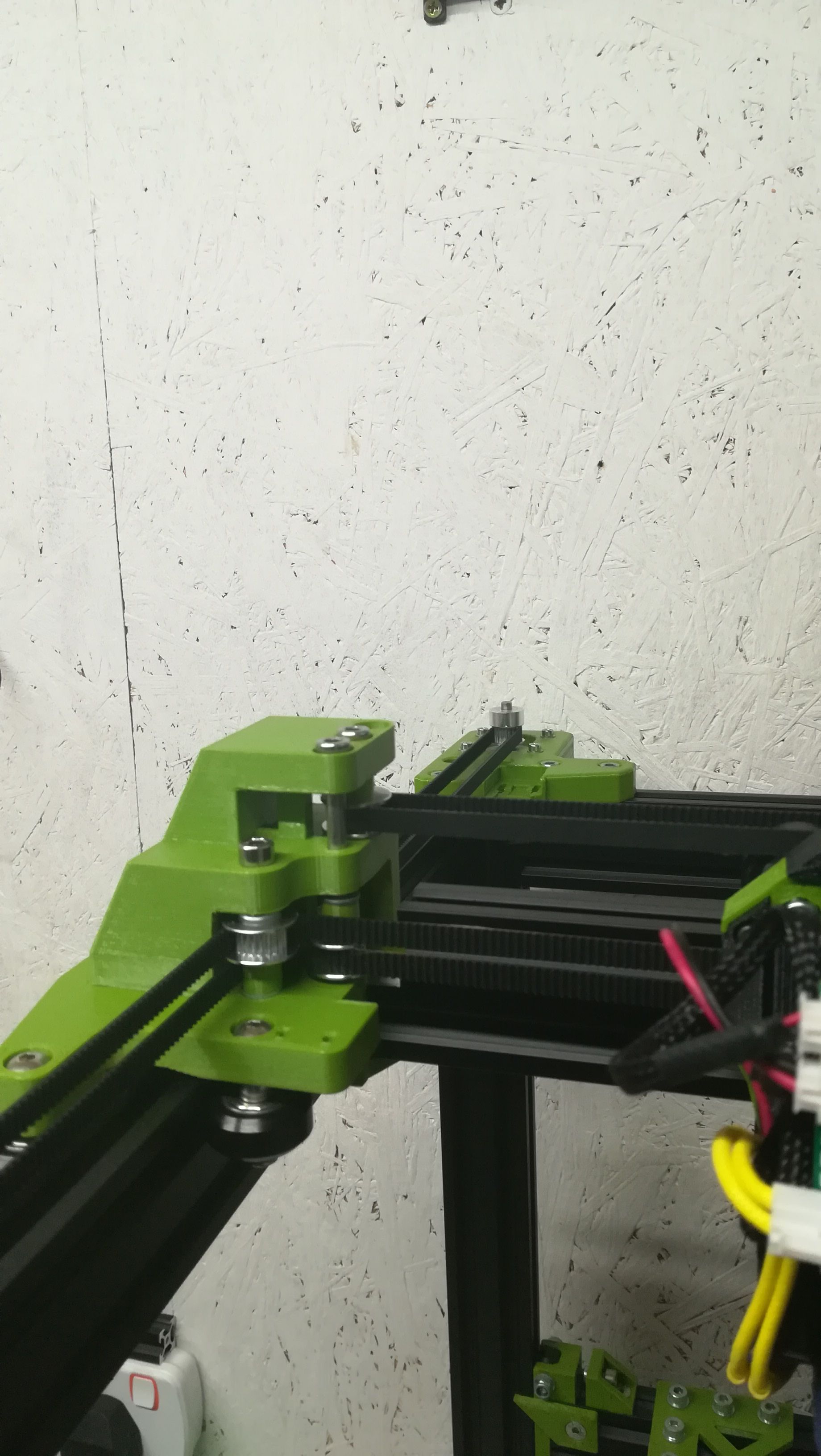
Please post a diagram that shows how the U carriage is controlled by the belts and motors.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
-
Here's some actual printer pictures.


-
if i'm not mistaken , if you want your bed center to be 0,0 then your y minima and maxima should not be 0 and 270 .
-
@hackinistrator Yep, sorry already changed that. I'll update the code.
Thanks.
-
also in homez and homeall you move x absolute position to 150 , which is not the center of the bed , this is the edge , right ?
-
@hackinistrator Also already changed sorry, lol. I posted the configs and then was messing around trying to work it out myself.
The issue right now, is the move to 0,0 with homing Z. It continues to try and move U past the end stop.
Also during the Y home, it shifts the X and U axis by 2.5mm and that is reflected in the coordinates.
Also the Y home doesn't do the double home move.
Thanks.
-
Your u axis routed like markforge, not corexyu. Are you sure u is not moving in opposite direction?
-
@hackinistrator Well it homes to max correctly so I'm guessing it's going the correct direction?
I commented out the M669 K5 line and add the kinematics I posted above.
-
Ok, slept on it and I'm going to try a few things today.
I've removed the configs from above and if things work out today, I'll report back with updated files.
J.
-
try this :
M669 X1:1:0:0 Y1:-1:0:1 Z0:0:1:0 U0:0:0:1if U axis moves correctly along X , but when you move Y , the u carriage also moves then you have to reverse the motor for y .
-
OK, so turned out the homing issue the part where the X and Y move to 0,0 and that was making the U axis try to move was an issue with have a H2 parameter in the G1 X0 Y0 line. Removed it and nearly everything now homes correctly :). Only issue is that when I home an axis using the 2 touch method the other 2 axis (not Z) increase by 2.5mm? Could this also be a H2 issue?
Now to start working out my offsets.
Thanks.
Follow my adventures in 3D Printing, laser cutting and electronics. https://linktr.ee/Rushmere3D
-
@Rushmere3D said in D-Bot/CrusaXY mash up (CoreXY iDEX):
Could this also be a H2 issue?
H2 should really only be used to lift the Z axis out of the way before it has been homed for clearance in XY moves.