Resonance, spreadCycle and stealthChop
-
Around here it's called 'Mechanic's Stethoscope' in case you want to search for it.
The problem with stiff metal structures is that vibrations spread everywhere. There are fancy one with multiple electronic microphones but identifying source of vibration was not as easy as I thought. Had to do a lot of trial and error. Eventually stepper dumpers solve the problem here.
https://www.amazon.com/8MILELAKE-Electronic-Stethoscope-diagnosis-mechanics/dp/B01GFKIKN2
Edit: reminds me, met once a guy that worked at local car dealership and his expertise was 'squeaks and rattling'.
")
-
@zapta said in Resonance, spreadCycle and stealthChop:
Around here it's called 'Mechanic's Stethoscope' in case you want to search for it.
Thanks. Good to know.
Had to do a lot of trial and error.
Indeed. But I did eventually find the source of the noise - which in my case was caused by cheap bearings.
The one I got was a non-electronic unit - "Lisle 52750 Stethoscope Kit" - less than $20.
Frederick
-
@garethky I was thinking... would better external drivers help? quality stepper drivers are expensive but not expensive as two Clearpaths
@fcwilt thanks for the suggestion, I'll check that out too.
I'm now evaluating the possibility to switch to a corexyuv since I get resonance only when the two motors are interacting together in the corexy.
-
@matt3o said in Resonance, spreadCycle and stealthChop:
@garethky I was thinking... would better external drivers help? quality stepper drivers are expensive but not expensive as two Clearpaths
I think the Trinamic's in the Duet are pretty top of the line drivers, no?
-
@garethky I mean proper stepper drivers... not the 1-chip-embedded drives like trinamic. Gecko drives come to mind ( https://www.geckodrive.com/gr214v-bulletproof-high-resolution-stepper-drive.html ), but there are dozens of them.
-
@matt3o said in Resonance, spreadCycle and stealthChop:
@garethky I mean proper stepper drivers... not the 1-chip-embedded drives like trinamic. Gecko drives come to mind ( https://www.geckodrive.com/gr214v-bulletproof-high-resolution-stepper-drive.html ), but there are dozens of them.
I don't know, maybe? There are a lot of alternatives on the way to servos: better drivers, "better steppers", closed loop steppers etc. I could spend time and money trying all of those out or I could skip straight to the end game and get a conclusive answer.
My vibration/noise happens at constant speeds in long moves. I don't think that focusing on the Acceleration/Jerk/Jounce will fix that. My bet is the motor's physical design has to change to enable smoother operation.
-
I did some investigations today around SealthChop tuning. I found that my machine resonated worst at 55mm/sec. So I have a test that runs a loop around the bed and sweeps from 40mm/sec to 65mm/sec in 5mm/sec increments. There is a HUGE difference between 55 and 60. 55 is a horrible screech and 60 sounds like what you expect from StealthChop.
So one aspect I had ignored until now was auto-tuning StealthChop. Basically, are we even getting StealthChop if we don't do the tuning procedure right? The manual says you have to apply power, enable stealth chop mode, pause for 130ms and than make a medium speed move of at least 8 steps, but ideally 400 full steps. My homing procedure did not do that exactly, so I added this to the end of my homeall.g:
; StealthChop Calibration ; log driver state first M569 P0 M569 P1 ; first toggle between Spread Cycle and StealthChop modes to enter the calibration phase M913 X30 Y30 M569 P0 D2 M569 P1 D2 M569 P1 D3 M569 P0 D3 M913 X100 Y100 G91 ; use relative positioning ; apply current to the motors G1 Y0 F1000 ; dwell for at least 130ms M400 G4 P135 M400 ; move Y by at least 400 full steps. ; The move needs to be made at a "medium speed", I think RPM > 10 G1 Y20 F6000 ; log driver state after M569 P0 M569 P1 G90 ; back to absolute positioningIt did not make any difference at all in the noise in my test. My logs don't show a lot of
tuninggoing on vs what already happened via homing:# before Drive 0 runs forwards, active low enable, timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, thigh 16 (234.4 mm/sec), tpwmthrs 16 (234.4 mm/sec), pwmScaleSum 17, pwmScaleAuto 1, pwmOfsAuto 24, pwmGradAuto 0, pos 200 Drive 1 runs in reverse, active low enable, timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, thigh 16 (234.4 mm/sec), tpwmthrs 16 (234.4 mm/sec), pwmScaleSum 15, pwmScaleAuto 0, pwmOfsAuto 23, pwmGradAuto 0, pos 840 # after Drive 0 runs forwards, active low enable, timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, thigh 16 (234.4 mm/sec), tpwmthrs 16 (234.4 mm/sec), pwmScaleSum 17, pwmScaleAuto 1, pwmOfsAuto 24, pwmGradAuto 0, pos 200 Drive 1 runs in reverse, active low enable, timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, thigh 16 (234.4 mm/sec), tpwmthrs 16 (234.4 mm/sec), pwmScaleSum 17, pwmScaleAuto 2, pwmOfsAuto 23, pwmGradAuto 0, pos 840- I don't understand why
pwmGradAutois always 0
- pwmScaleAuto does seem to change, slightly

- I don't understand why
-
Yep, I was doing it wrong! @DC42 to the rescue:
So we need to kill the motor power with
M18, then make a tiny move.So now I get real tuning values in my logs!!

# (log truncated to make it easy to read) Drive 0 pwmScaleSum 22, pwmScaleAuto 0, pwmOfsAuto 23, pwmGradAuto 22, pos 632 Drive 1 pwmScaleSum 23, pwmScaleAuto 0, pwmOfsAuto 27, pwmGradAuto 19, pos 600And I can hear the difference! My 55mm/second resonance is gone. Its not gone at every step frequency but its an improvement. @matt3o do you have something like this in your homing script??
-
After some more testing this is a mixed bag. So tantalizing but still imperfect. I tested with different speeds to perform the auto tuning and different move lengths. I tried switching between StealthChop and Spread Cycle at different speeds. And I tried going back to 1.8 degree motors.
With the 0.9 degree motor I found:
- With tuned StealthChop slow moves are pretty much silent
- With tuned StealthChop speeds between about 110mm/sec and 170mm/sec are incredibly noisy. Much worse than Spread Cycle.
- Trying to switch between StealthChop and Spread Cycle at 100mm/sec causes the machine to loose steps.
- The best performance was switching from StealthChop to Spread Cycle at ~57mm/sec. But there were scary "popping" noises near the transition speed that I could not get rid of.
Knowing what I know now, I figure I have never heard tuned Stealth Chop on the 1.8 degree motors, so back on the Tool Changer they went:
- Slow moves are very quiet but with a low pitched rumble that wasn't there with the 0.9's
- Moves in tuned StealthChop above about 180mm/sec screech badly.
- I can tune the cut over from StealthChop to SpreadCycle to a higher speed, ~75mm/sec
- With that setting test sweeps from 50mm/sec to 200mm/sec in 10mm/sec increments don't turn up any objectionable screeching
But (and there is always a but right?) when you print with this setup it becomes apparent that the drivers do the StealthChop/SpreadCycle switch every time there is a hard change of direction. This causes a loud jerk/bang noise which isn't acceptable. Forcing StealthChop for printing works great until there is a rapid move and it screeches.
When it is quiet, its truly quiet, way quieter than it ever was with the 1.8 motors. It is quieter than my Prusa for some moves! The cheap/easy answer then is to run it in StealthChop all the time and limit all moves to a max speed of ~150mm/sec. Maybe put the printer on a big block of foam to damp out the rumble.
This is the script that I'm using. In my HomeAll.g I home X & Y, then run this, then home X, Y, Z, C.
; StelthChop Calibration G91 ; use relative positioning M18 ; cut all motor power M915 P0 T5 ; set coolstep threshold (disables stall detection) M915 P1 T5 ; set coolstep threshold (disables stall detection) M569 P0 D3 H16 V16 ; set stealthChop mode, set tpwmthrs and thigh M569 P1 D3 H16 V16 ; set stealthChop mode, set tpwmthrs and thigh ; log driver state after reset M569 P0 M569 P1 M564 H0 ; disable safe moves ; apply current to the motors G1 Y0.02 F1000 ; dwell for at least 130ms G4 P250 ; For CoreX/Y: move Y by at least 400 full steps, this moves both motors ; The move needs to be made fairly fast G1 Y100 F6000 ; dwell for at least 130ms G4 P250 ; move back to the starting location to speed up homing G1 Y-100 F6000 ; log driver state after tuning M569 P0 M569 P1 M564 H1 ; enable safe moves G90 ; back to absolute positioningIf you run
M569 P0and yourpwmGradAutovalue is0, you haven't auto-tuned and you are not getting the benefits of StealthChop.I don't fully understand what
M915 P0 T5does.T5should set the Coolstep control register to the value 5 in binary. But I also see documentation saying this is some sort of speed. Leaving it out breaks the tuning.And I'm not saying I won't still put servo's on it... in just doing my due diligence first
-
@garethky, thanks for the update!
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 thanks! Can you say what
T5inM915 P0 T5is actually doing? -
@garethky said in Resonance, spreadCycle and stealthChop:
@dc42 thanks! Can you say what
T5inM915 P0 T5is actually doing?It's rather technical. See sections 5 and 6.7 of the TMC2660 datasheet. Unless you understand what you are doing, I suggest you remove that T5 parameter.
-
@garethky This is very interesting, can you confirm which drivers you are using (5160/2209/2660)? Having recently switched to 0.9 e3d steppers on a CoreXY I'd like to get rid of some of the noise as well!
@dc42 If/when you have have tuned a motor would it make sense to read the tuning values and then set them at startup (rather then tuning each time)? Is it possible with RRF to set all of the required register values (and which ones are they?).
-
@gloomyandy I'm using the Duet 3 with the
TMC2160TMC5160@dc42 removing the T5 parameter breaks the tuning! Nothing I have ever tried worked properly till I tried that suggestion.
WARNING: its smarter me from the future, everything below this line is WRONG! Leaving it here to demonstrate the confusion:
I'm technical
 . But even better, @Kolbi made a spreadsheet so we can have visual aids:
. But even better, @Kolbi made a spreadsheet so we can have visual aids: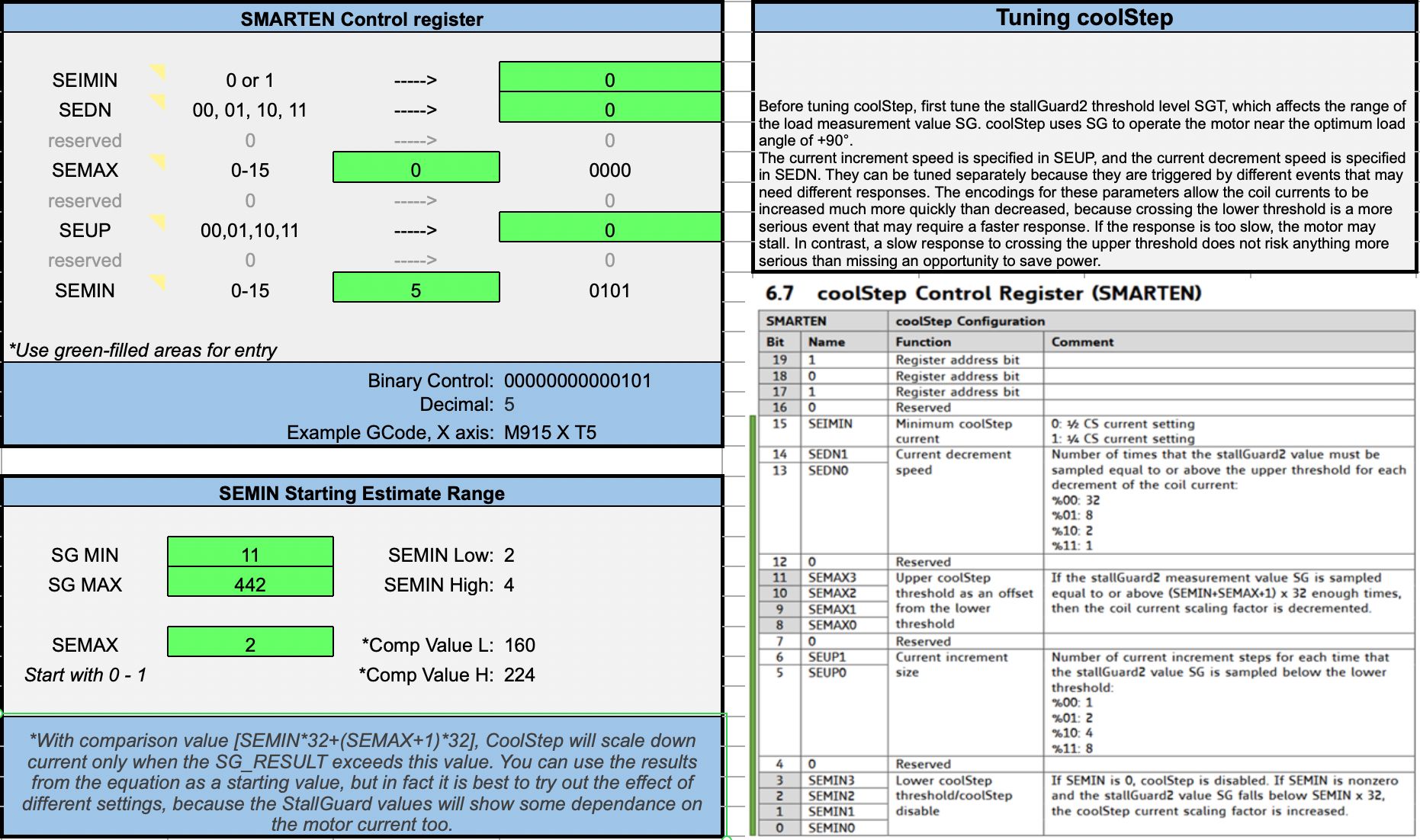
T5sets all of the bits related to Stall Guard to 0/off. But it sets SEMIN to 5 or really 160. My guess is that the important part is assigning all the stall guard fields to 0. The value 5 is probably something that should be tuned.My machine config has no other calls to M915 except for the C axis. So there is some voodoo here about writing zeros to that register that I don't see documented in the manual. Maybe its TMC2160 specific?
-
@dc42 I think the documentation is confusing people, me included, so I went to he source code:
Setting the T param on the 22XX chips does nothing:
https://github.com/Duet3D/RepRapFirmware/blob/7c571137d68a1a2de0d79e2dc1741793a96c7279/src/Movement/StepperDrivers/TMC22xx.cpp#L611Only the 51XX chip family writes the register:
https://github.com/Duet3D/RepRapFirmware/blob/7c571137d68a1a2de0d79e2dc1741793a96c7279/src/Movement/StepperDrivers/TMC51xx.cpp#L513The register it writes to is
TCOOLTHRSsee here. The documentation for M915 says that T sets the "CoolStep control register", which I think a whole lot of users assumed was the "CoolStep config register" referenced here. The config register is written to but only via the set stall detect threashold and set stall detection filer.So the calculator that people are using doesn't do what they think it does. There is no way to write all the bits of the CoolStep config registers with M915. Any large values supplied to the T parameter get truncated to 20 bits and shoved into
TCOOLTHRS. I don't think anyone pointed out this confusion.I think the documentation here and here should be updated to say that T writes to
TCOOLTHRS. The only accurate description of how this works is here.Also, my Duet3 board has 5160's, verified by inspection.
-
@garethky said in Resonance, spreadCycle and stealthChop:
After some more testing this is a mixed bag.
[snip]
I read your interesting report and it's exactly my experience. In real life printing I can't use switching from stealth to spread, jolts and lost steps... it's a nightmare. At "high" speed stealth is not usable, not just for the noise but it loses steps. Unfortunately that happens already at around 130mm/s (with my motors).
So honestly I don't know what else to do apart throwing more money into motors or trying a corexyuv.
Long story short, I don't think this is an issue that can be solved with stealthchop
-
@matt3o said in Resonance, spreadCycle and stealthChop:
I read your interesting report and it's exactly my experience. In real life printing I can't use switching from stealth to spread, jolts and lost steps... it's a nightmare. At "high" speed stealth is not usable, not just for the noise but it loses steps. Unfortunately that happens already at around 130mm/s (with my motors).
So honestly I don't know what else to do apart throwing more money into motors or trying a corexyuv.
Long story short, I don't think this is an issue that can be solved with stealthchop
Agreed. I'm happy that I got it to work but unhappy with being limited to 150mm/sec. I'd like to see 300 max when loaded with a tool and maybe 500 when no tool is loaded.
I'm going to try the 1.8 degree 2 Amp steppers that the Voron community are recommending. But that is the last stepper I'm going to mess with. Seeing the StealthChop results we know its not the mechanical system that's at fault.
-
@garethky said in Resonance, spreadCycle and stealthChop:
I'm going to try the 1.8 degree 2 Amp steppers that the Voron community are recommending.
if they are the Moons 1.8° 2A, don't do it, I have them, they are good but they don't solve the issue (you just move the resonance to a different frequency). Also to be really fair, I get a much better surface texture with 0.9° on my corexy.
-
Would it be possible to add a command to write directly to the driver control registers for those who know what they are doing? (I would love to kill my chips in experimenting, my system has two more drivers than I really need!
 )
) -