Robotic manipulator using duet
-
I'm toying with the idea of using a duet to make a small manipulator to work with a small collaborative robot in a welding environment.
This would not be intended to work synchronously as a true 7th, 8th & 9th axis, but rather the general sequence of events for the robot to communicate with and issue commands to the duet via a socket connection.
Essentially after homing, the robot would issue G code commands to move along the linear rails as required and rotate the two rotary axis to present the part in the correct angle.
The robot would then carry out a number of welds before again moving the part as required.
I would be able to do a certain amount of coordinated movement by calculating the time required for a manipulator move and programming the robot to complete its movement in teh same time.In order to carry the weights of both robot and parts to be welded I expect I'd have to use nema 23 or nema 34 steppers with external drivers and gearboxes on the two rotary axis.
So my questions are thus.
- what configuration of duet hardware is likely to be required?
e.g. Duet 3 6HC alone, or will 3 x 1XD boards be required
I'm not sure if 24 volts is enough, so the the comes to mind as it could be powered by 48 volts and connected to a closed loop external driver I believe? - What kinematics would be best suited?
It's similar to a serial scara, but obviously the linear axis is not vertical like a typical "Z" axis
Any other "gotchas" I might need to consider?
Here is a rough simulation of the setup.
In use, the manipulator would be turned 90 degrees so that longer objects on the blue face plate would be parallel to the travel direction linear axis, but this is easier to view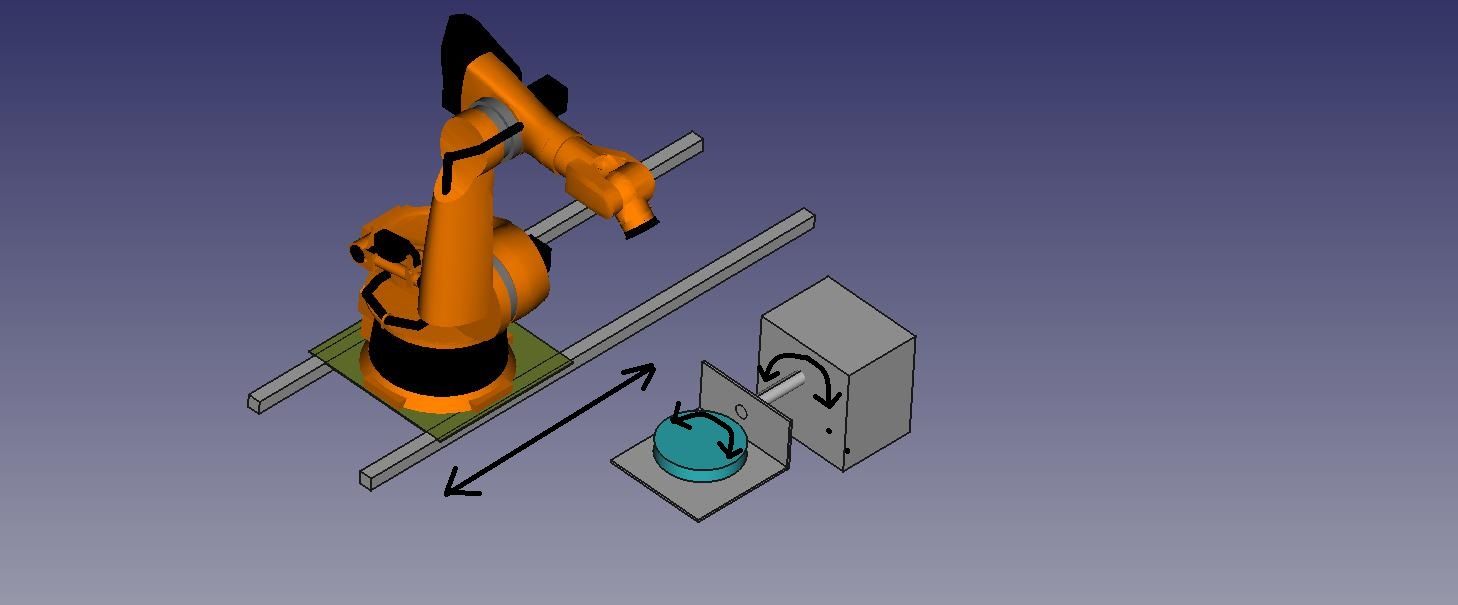
- what configuration of duet hardware is likely to be required?
-
@jens55 is working on kinematics for a robot arm IIRC.
-
@oliof
Thanks, but the actual robot control would be done by its own controller.
This is just a moving platform that the base of the robot mounts on and two rotating axis to turn the part. -
ah, thanks for clarifying. But then this is just a single axis?
-
@oliof
No, 3 axis as indicated by the arrows.
One axis is linear and the other two are rotary. -
Why external drivers? Duet 3 MB6HC can drive Nema 34 motors unless you want very high speeds.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42
Probably only advantage may be closed loop, but outside that the speeds wouldn't be high.
Any thoughts on kinematics? -
@OwenD said in Robotic manipulator using duet:
I would be able to do a certain amount of coordinated movement by calculating the time required for a manipulator move and programming the robot to complete its movement in teh same time.
That's a perfect usecase for semaphores instead of blindly relying on the other robot to do it's duty.
Thousand of slapstick scenes in movies come to my mind, where something (someone) relied blindly on other actions to happen...