Very confused with Duet mesh level correction
-
Not a problem
M122M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.2 running on Duet 3 MB6HC v0.6 or 1.0 (standalone mode) Board ID: 08DJM-956L2-G43S4-6JKDD-3SJ6T-TB6GH Used output buffers: 1 of 40 (36 max) === RTOS === Static ram: 149788 Dynamic ram: 93192 of which 132 recycled Never used RAM 115720, free system stack 122 words Tasks: NETWORK(ready,171) ETHERNET(blocked,109) HEAT(blocked,271) CanReceiv(blocked,927) CanSender(blocked,350) CanClock(blocked,349) TMC(blocked,19) MAIN(running,671) IDLE(ready,19) Owned mutexes: === Platform === Last reset 84:30:27 ago, cause: software Last software reset at 2021-03-19 23:20, reason: User, GCodes spinning, available RAM 115720, slot 0 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 Aux1 errors 0,0,0 MCU temperature: min 39.6, current 40.5, max 44.5 Supply voltage: min 22.9, current 23.9, max 24.6, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.2, max 12.3, under voltage events: 0 Driver 0: position 30073, standstill, reads 53715, writes 130 timeouts 0, SG min/max 0/915 Driver 1: position 35556, standstill, reads 53715, writes 130 timeouts 0, SG min/max 0/125 Driver 2: position 365607, standstill, reads 53705, writes 140 timeouts 0, SG min/max 0/1023 Driver 3: position 0, standstill, reads 53796, writes 50 timeouts 0, SG min/max 0/198 Driver 4: position 0, standstill, reads 53706, writes 140 timeouts 0, SG min/max 0/1023 Driver 5: position 0, standstill, reads 53835, writes 11 timeouts 0, SG min/max 0/0 Date/time: 2021-03-23 11:50:47 Slowest loop: 69.48ms; fastest: 0.03ms === Storage === Free file entries: 10 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 3.3ms, write time 22.6ms, max retries 0 === Move === DMs created 125, maxWait 416792ms, bed compensation in use: mesh, comp offset 0.000 === MainDDARing === Scheduled moves 3200, completed moves 3200, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 33], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 Heater 0 is on, I-accum = 0.0 Heater 1 is on, I-accum = 0.6 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 67.65ms; fastest: 0.02ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions HTTP sessions: 1 of 8 - Ethernet - State: active Error counts: 0 0 1 0 0 Socket states: 5 2 2 2 2 0 0 0 === CAN === Messages queued 1217061, send timeouts 2738195, received 0, lost 0, longest wait 0ms for reply type 0, free buffers 48M98 P"config.g"
M98 P"config.g" HTTP is enabled on port 80 FTP is disabled TELNET is disabled```Config
; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.2.0 on Wed Jan 06 2021 20:53:06 GMT-0500 (Eastern Standard Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Gigabot" ; set printer name ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S1 ; physical drive 0.0 goes forwards M569 P0.1 S0 ; physical drive 0.1 goes backwards M569 P0.2 S1 ; physical drive 0.2 goes forwards M569 P0.3 S1 ; physical drive 0.3 goes forwards M569 P0.4 S1 ; physical drive 0.4 goes forwards M584 X0.0 Y0.1 Z0.2:0.4 E0.3 ; set drive mapping M671 X-109:707 Y300:300 S2.5 ; leadscrews at left (connected to Z) and right (connected to E1) of X CHANGE AFTER FIGURE OUT POSITION OF BL ON MOUNT/limits M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X59.26 Y59.26 Z2015.50 E393.46 ; set steps per mm ;M566 X900.00 Y900.00 Z60.00 E120 ; set maximum instantaneous speed changes (mm/min) WAS 120 ;M203 X6000.00 Y6000.00 Z180.00 E7000.00 ; set maximum speeds (mm/min) ;M201 X500.00 Y500.00 Z20.00 E3500 ; set accelerations (mm/s^2) M566 X600.00 Y600.00 Z12.00 E120.00 ; Set maximum instantaneous speed changes (mm/min) M203 X18000.00 Y18000.00 Z180.00 E15000.00 ; Set maximum speeds (mm/min) this allows 585 mm3 max flow rate M201 X3000.00 Y3000.00 Z20.00 E10000.00 ; Set accelerations (mm/s^2) M906 X950 Y1900 Z950:950 E950 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X607 Y603 Z578.5 S0 ; set axis maxima M208 X0:607 Y0:603 ; max movement allowed ; Endstops M574 X1 S1 P"!io0.in" ; configure active-high endstop for low end on X via pin !io0.in M574 Y2 S1 P"!io1.in" ; configure active-high endstop for high end on Y via pin !io1.in ; Z-Probe M950 S0 C"io7.out" ; create servo pin 0 for BLTouch M558 P9 C"^io7.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds ORIGINAL ;M558 P9 C"^io7.in" H3 F60 T6000 A3 R0.75 S-1 ; will probe each spot 3x then average it out G31 P25 X-5 Y48 Z2.5 ; G31 P25 X-5 Y48 Z2.09 PRIOR TO MARCH 19set Z probe trigger value, offset and trigger height ;M557 X5:600 Y47:603 S40 ; define mesh grid M557 X5:598 Y0:603 P5:7 ; Heaters ;Bed heater config M308 S0 P"temp0" Y"thermistor" T100000 B4138 A"Heated bed"; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 M307 H0 R0.418 C453.0 D4.22 S1.00 V23.9 M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C ;Hotend heater config ;M308 S1 P"temp1" Y"pt1000" A"PT1000" ; configure sensor 1 as thermocouple via CS pin spi.cs1 PT1000 code ;M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 PT1000 code M308 S1 P"spi.cs0" Y"rtd-max31865" A"PT100" ; configure sensor 1 as thermocouple via CS pin spi.cs1 CODE FOR PT100 M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 CODE FOR PT100 ;M307 H1 R1.424 C485.5 D8.34 S1.00 ; PID SETTINGS FOR HOTEND previous one M307 H1 R1.558 C264.3 D6.50 S1.00 ;M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S450 ; set temperature limit for heater 1 to 450C ; Fans M950 F0 C"out7" Q500 ; create fan 0 on pin out4 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out8" Q500 ; create fan 1 on pin out5 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous T0 ; select first tool M555 P2homeall.g
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v3.2.0 on Wed Jan 06 2021 20:53:07 GMT-0500 (Eastern Standard Time) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-598 Y617 F4000 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X5 Y-5 F6000 ; go back a few mm G1 H1 X-598 Y617 F360 ; move slowly to X and Y axis endstops once more (second pass) G90 ; absolute positioning G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G90 ; absolute positioning G1 X300 Y300 F6000 ; go to first probe point G30 ; home Z by probing the bed G91 ; relative positioning G1 H1 Y617 F4000 ; move quickly to Y axis endstop and stop there (first pass) G1 H2 Y-5 F6000 ; go back a few mm G1 H1 Y617 F360 ; move slowly to Y axis endstop once more (second pass) G90 ; absolute positioninghomey.g
; homey.g ; called to home the Y axis ; ; generated by RepRapFirmware Configuration Tool v3.2.0 on Wed Jan 06 2021 20:53:07 GMT-0500 (Eastern Standard Time) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Y617 F4000 ; move quickly to Y axis endstop and stop there (first pass) G1 H2 Y-5 F6000 ; go back a few mm G1 H1 Y617 F360 ; move slowly to Y axis endstop once more (second pass) G1 H2 Z-5 F6000 ; lower Z again G90 ; absolute positioninghomez.g
; homez.g ; called to home the Z axis ; ; generated by RepRapFirmware Configuration Tool v3.2.0 on Wed Jan 06 2021 20:53:07 GMT-0500 (Eastern Standard Time) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G90 ; absolute positioning G1 X300 Y300 F4000 ; go to first probe point G30 ; home Z by probing the bed ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z5 F100 ; lift Z relative to current position ;G90 ; absolute positioningbeg.g
; bed.g ; called to perform automatic bed compensation via G32 ; ; generated by RepRapFirmware Configuration Tool v3.2.0 on Wed Jan 06 2021 20:53:06 GMT-0500 (Eastern Standard Time) ;M561 ; clear any bed transform ;G29 ; probe the bed and enable compensation G28 ; home G30 P0 X0 Y300 Z-99999 ; probe near a leadscrew, half way along Y axis G30 P1 X600 Y300 Z-99999 S2 ; probe near a leadscrew and calibrate 2 motorsPrusaslicer start gcode
M572 D0 S0.025 ;hemeera pressure avance attempt G90 ; use absolute coordinates M83 ; extruder relative mode M104 S170 ; set extruder temp for bed leveling M140 S[first_layer_bed_temperature] ; set bed temp ;M109 R170 ; wait for bed leveling temp M190 S[first_layer_bed_temperature] ; wait for bed temp ;G28 ; home all without mesh bed level G32 G29 ; mesh bed leveling G29 S1 M104 S[first_layer_temperature] ; set extruder temp G92 E0.0 G1 Y0 X0 F4000 G1 Z3 F720 M109 S[first_layer_temperature] ; wait for extruder temp ; intro line G1 X0 F1000 G1 Z0.2 F720 G1 X60 E38.0 F900 G1 X130 E30.0 F700 G92 E0.0Let me know if anything else would be helpful.
-
Yea I figured that this could just be a minor setting I mixed up when I set things up however I did use the configurator as my base to get me started. I would not be surprised if I fudged something in that process, ive become to used to Marlin but love the hardware Duet offers just wish I could get my head around the firmware.
Its a cartesian frame where the bed drops down as the print progresses
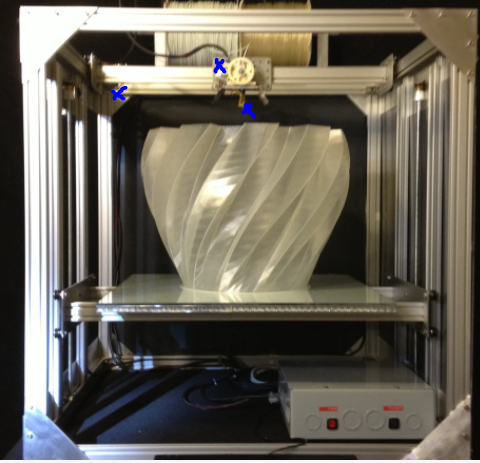
X axis endstop is on the print head and homes to the minimum
Y axis endstop is in the back left corner and homes to a maximum
Z axis endstop is the BLtouch which homes to a minumum
-
@singhm29 said in Very confused with Duet mesh level correction:
; Z-Probe
M950 S0 C"io7.out" ; create servo pin 0 for BLTouch
M558 P9 C"^io7.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds ORIGINALI'm no expert for BLTouch. Is it the usual way to define 'io7' as in- and output?
-
@o_lampe said in Very confused with Duet mesh level correction:
@singhm29 said in Very confused with Duet mesh level correction:
; Z-Probe
M950 S0 C"io7.out" ; create servo pin 0 for BLTouch
M558 P9 C"^io7.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds ORIGINALI'm no expert for BLTouch. Is it the usual way to define 'io7' as in- and output?
Yes that's ok. The Duet 3 has a range of generalized io ports.
-
@singhm29 said in Very confused with Duet mesh level correction:
M906 X950 Y1900 Z950:950 E950 I30 ; set motor currents (mA) and motor idle factor in per cent
You only need to define a single value for Z. It will be applied to all drivers assigned to that axis. It's only for multiple extruders that the values must be defined for each, since extruders are independant.
-
@singhm29 said in Very confused with Duet mesh level correction:
X axis endstop is on the print head and homes to the minimum
Y axis endstop is in the back left corner and homes to a maximum
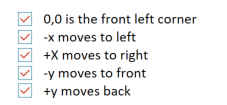
Z axis endstop is the BLtouch which homes to a minumumJust to be perfectly clear can you confirm that 0,0 is at the front left corner, -x moves to the left, +x to the right, -y to the front, +y to the back?
-
@singhm29 said in Very confused with Duet mesh level correction:
G28 ; home G30 P0 X0 Y300 Z-99999 ; probe near a leadscrew, half way along Y axis G30 P1 X600 Y300 Z-99999 S2 ; probe near a leadscrew and calibrate 2 motors
In bed.g you may want to add a G30 at the center of the bed after the sides have been probed and the tilt adjusted, because the act of changing the tilt can have an effect on the position of Z0. You may also want to double up on the tilt correction by adding a second pass.
G28 ; home G90 G30 P0 X0 Y300 Z-99999 ; probe near a leadscrew, half way along Y axis G30 P1 X600 Y300 Z-99999 S2 ; probe near a leadscrew and calibrate 2 motors G1 X300 Y300 F4000 ; go to first probe point G30 ; home Z by probing the bed G30 P0 X0 Y300 Z-99999 ; probe near a leadscrew, half way along Y axis G30 P1 X600 Y300 Z-99999 S2 ; probe near a leadscrew and calibrate 2 motors G1 X300 Y300 F4000 ; go to first probe point G30 ; home Z by probing the bed -
@singhm29 said in Very confused with Duet mesh level correction:
G29 ; mesh bed leveling G29 S1
The second G29 S1 is redundant. I don't think it would cause a problem, but once the G29 is performed the mesh is active, so no need to load the saved mesh afterwards.
-
Make those corrections and see how it goes.
Also keep in mind that the 2 point tilt correction is only going to correct for tilt along the X axis. You'll still need to manually level the bed to eliminate any tilt on the Y axis as much as possible for mesh compensation to be most effective.
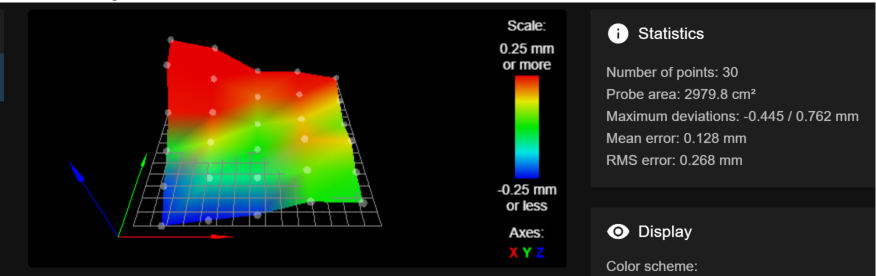
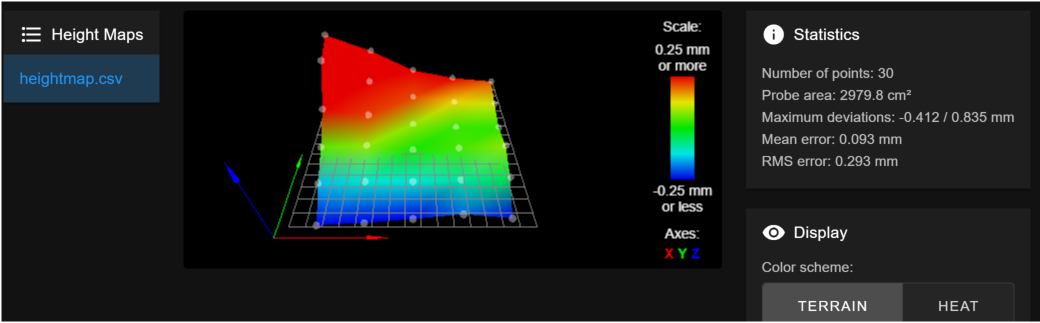
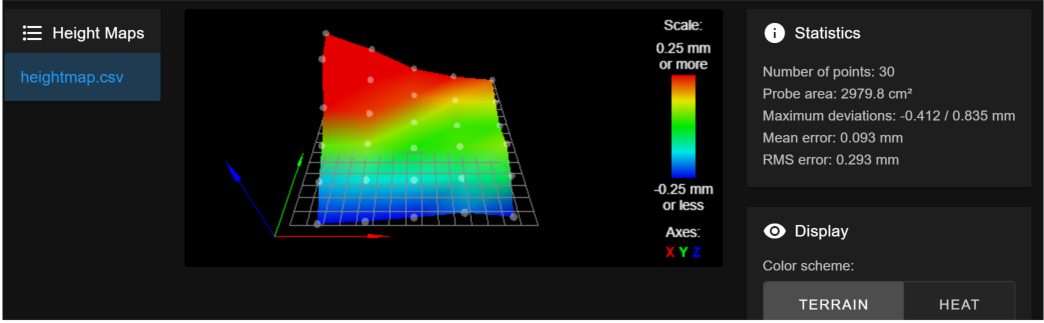
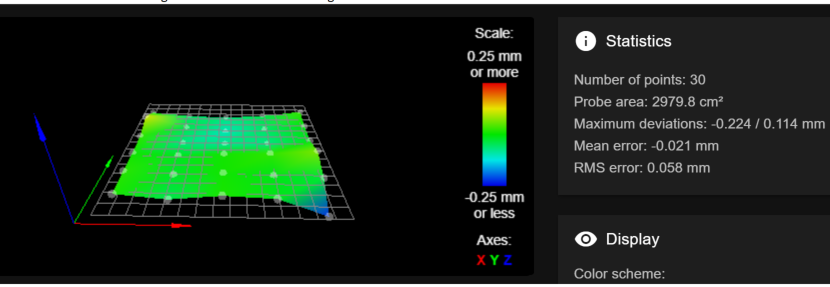
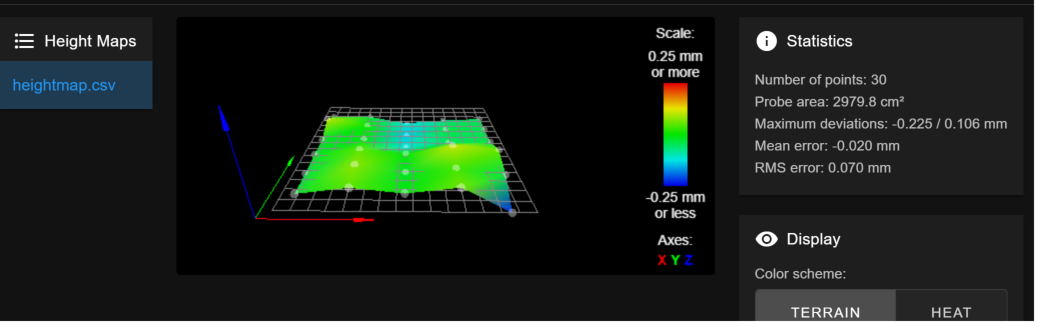
Your heightmap image indicates that there is a strong downward tilt back to front. That may be the bed tilting, but it may also be the XY gantry tilting down towards the back. Check the frame for squareness.
-
Thanks for the feedback. All changes were made other than changing any hardware yet.
Confirmed movement
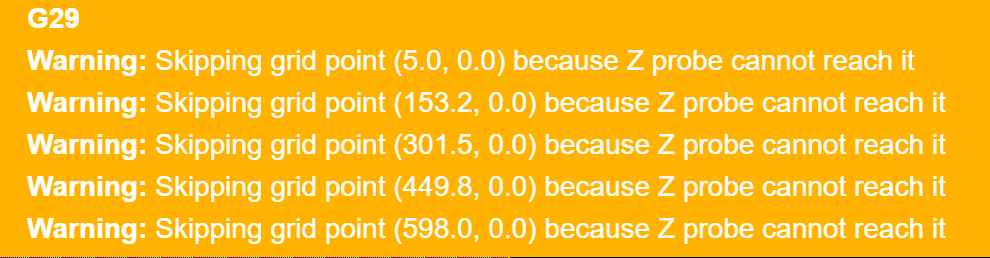
Result from G29 without running G32
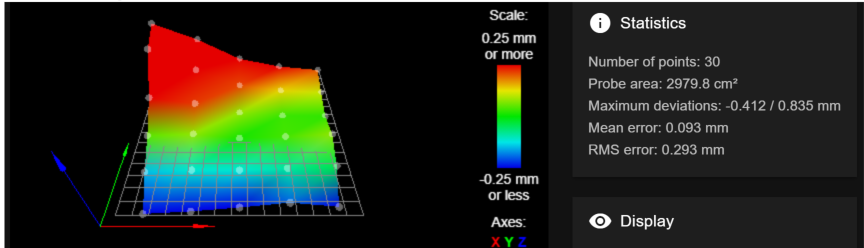
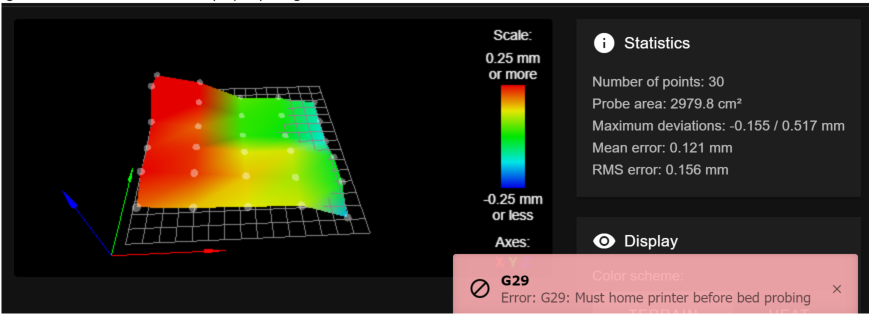
Result from G32 followed by G29
Other interesting things I observed
-when running G29 it skips the first row because the Bltouch would end up trying to probe off the bed
-after this I homed to center and again set to Z=0, the distance was no longer 1 paper sheet but a much larger distance
In terms of bed tilt along the Y axis I'm trying to imagine how I would correct that, normally if I have a bad nozzle crash I will move down the Z axis to the lowest point turn off stepper motors and then manually move down until my bed rests on both Z axis stepper motors to equal out both sides. I feel like that would correct X axis skew and help Y axis but im not sure after that what I could change...I guess I could also verify that there is actually tilt occuring by manually leveling the bed and turning off any compensation and seeing if jogging the Z axis up and down results in a change of Z distance between the front and back?
-
@singhm29 said in Very confused with Duet mesh level correction:
I guess I could also verify that there is actually tilt occuring by manually leveling the bed and turning off any compensation and seeing if jogging the Z axis up and down results in a change of Z distance between the front and back?
Yes that would be a good test. Is that large amount of tilt at the bed, or in the gantry?
-
I wasn't too sure if it was the gantry or the bed so I tried correcting both.
Here was my bed level before doing any changes to the physical bed.
Here it was after I loosened the bed corners so that the springs were all completely loose and then I moved the gantry to rest on the steppers at the bottom of the Z axis (equalizing the Z gantry tilt from left to right and back to front). From here again I set the Z probe offset which changed from 2.5 to 3.1mm. Here is what I got from that
Not particularly promising...so being humble I decided to give another go at bed leveling manually. Here is the result from that
Now to give some context I am not new to bed leveling manually as I have been printing since 2015 but here what was really baffling.
I turned off G29, G32 and G29 S1 from my start gcode printed for a round and the first layer came out well.
I turned on G29 and G32 and lo and behold with no physical changes to the bed I now had this
Thinking it was possibly the presence of G29 followed by G29 S1 I turned it back on to see if that would cause an issue. Again the new bed level came out great.
So I am back to a good looking bed but I have no idea how it was fixed. I'm hoping this will stick and wont be doing any physical changes. Lets see how long this lasts! Open to any thoughts but either way appreciate walking me through the possible issues.