HELP! Duet 2 WiFi Configuration and DWC Upload???
-
@pcnoobneedsmajorhelp I'll check your files a bit later I can't view the g files on mobile.
-
ok
Here are some word docs. Just going to add the .json file so you can read it. I whited out the IP address stuff on it. I wasn't sure if that was sensitive info or not.
-
Ok so the config looks mostly ok. The biggest problem I see is that there is no endstop for z or a Z probe defined, so there is no way to home the Z axis as it is now. You mentioned you have a Z probe. Are you wanting to install it or use the endstop for now?
What problems specifically are you encountering?
Can you go to the gcode console tab in DWC and send the command
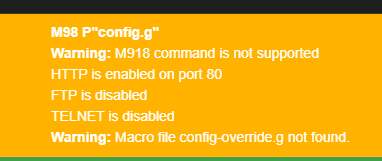
M98 P"config.g"please? and copy and paste the results here. -
I do have a BL Touch but I don't want to complicate things too much. so i'll just use endstops for now. The main goal with this new board is just to be able to get back to basic printing but with 300+ temperatures
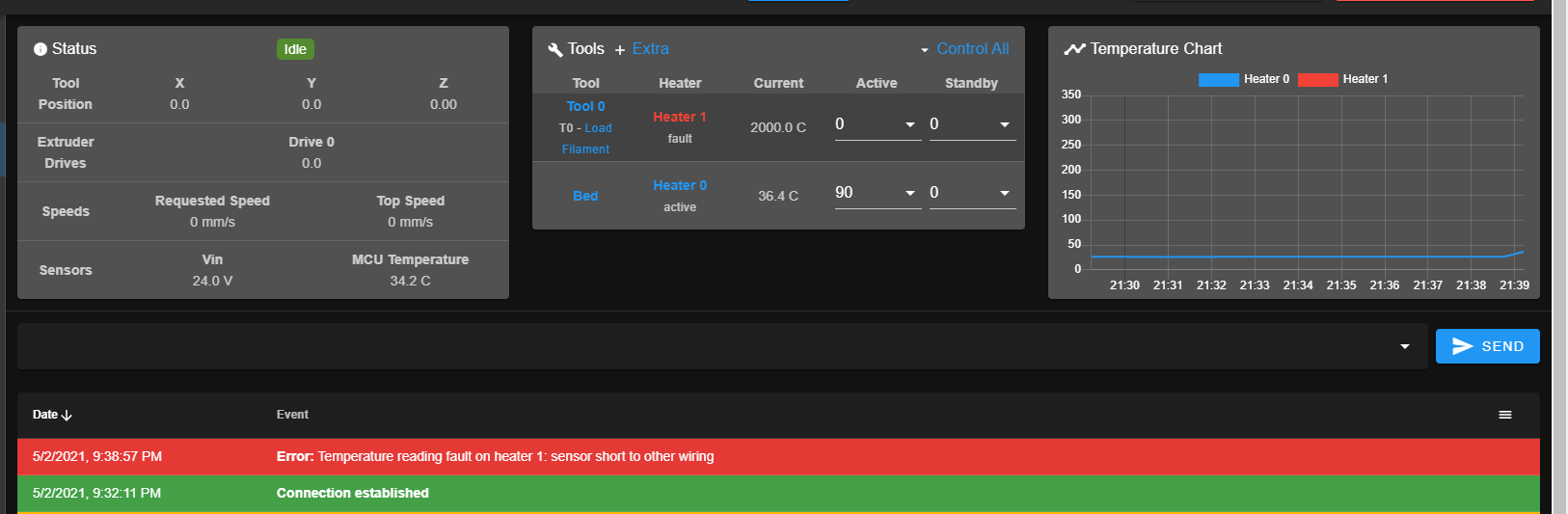
The problems I'm encountering are that no matter what button I hit on the DWC or the PanelDue my printer doesn't react/do anything. I just get errors and faults.
-If I try to test the Hotend temp...nothing happens and I get a fault.
-If I try to test the PMW fans, they don't react.
-If I try to heat the bed, nothing happens
-If I try to move an axis motor nothing happens and I get a fault.
At one point I hit the home button I think, on the PanelDue and my Z motor was traveling at max speed and was running into endstops violently, never stopping. I ended up hitting the Emergency stop button.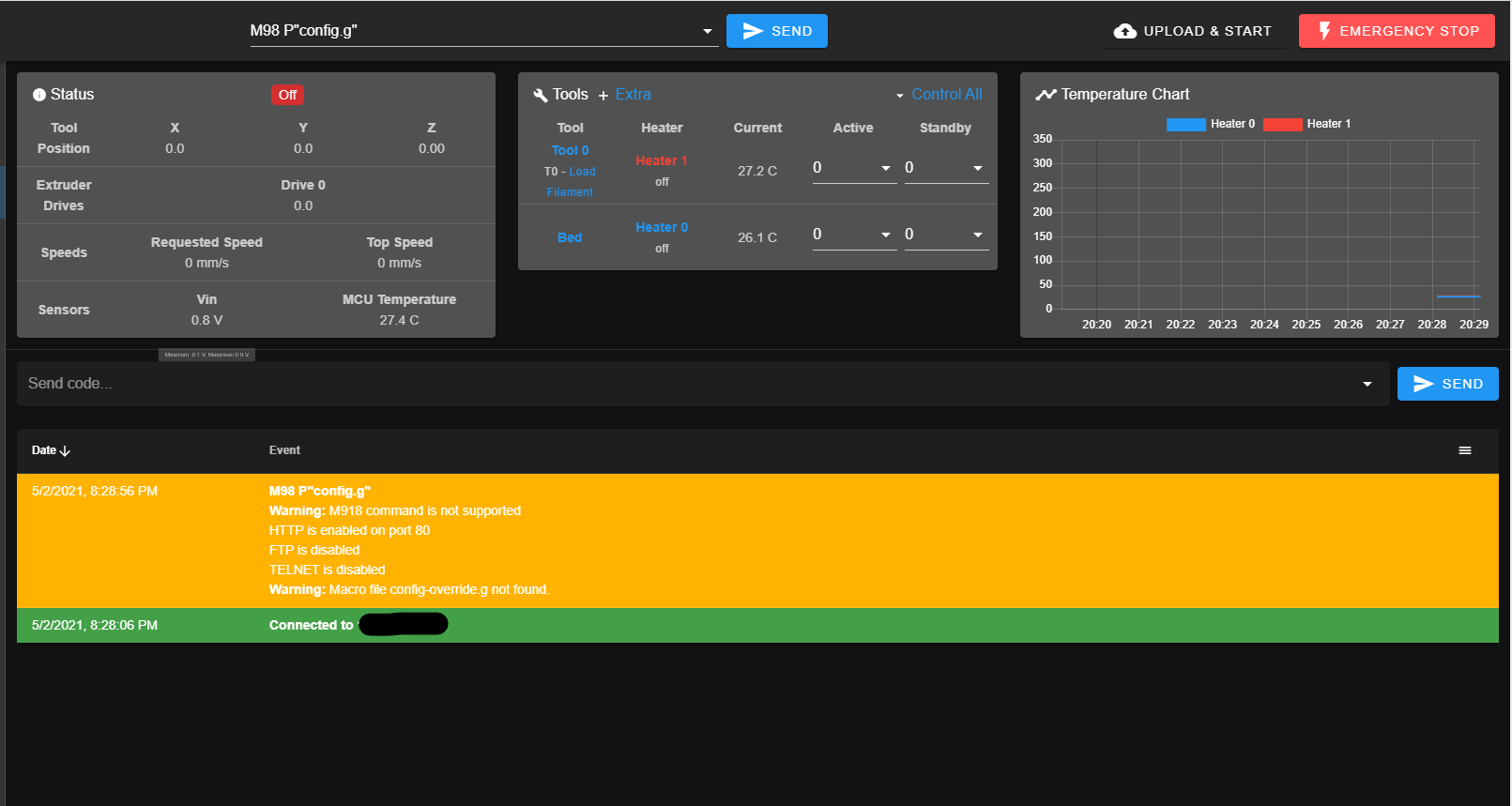
Seriously, thank you thus far for your attention and help with my issue. It means a great deal.
-Carson
-
Well to use the Z endstop you'll need to edit the line in config.g to add the Z endstop.
M574 X1 Y1 S1 ; set active high endstops
AddZ1in there. That should take care of the Z axis problem providing the endstop is connected correctly and actually working. Do a careful test first time. Does the LED on the board change when you click the switch by hand? Click homeZ and then click the switch by hand before it hits. If it doesn't stop, E stop it.When you say you get faults and errors. It would help to know exactly what you try to do and exactly what happens including the error message. As in, I send this command and it does this. Or I click on this and it does this.
If you were trying to use those test macros to check things, that might have been part of the problem.
Do the fans work when connected to the always on fan ports?
When you try to turn on the bed heater does the LED on the board turn on? What kind of bed is it? How is it wired?
Motors won't move until they are homed.
-
@phaedrux
Ok. So. There was a loose wire on my Z Endstop. That's fixed. I did add the Z1 in there after the S1 on the line in the config.g file, saved changes and reset the board. All the LEDs are lit and the Endstops are working when I clicked them with my hand. The bed is heating fine and is working as it should, but I didn't see a light come on when I made the bed active-Fans are still non-reactive. whether I set them at 100% 0r 0% it seems they're always at 100%. My always on fans are on and working as they should.
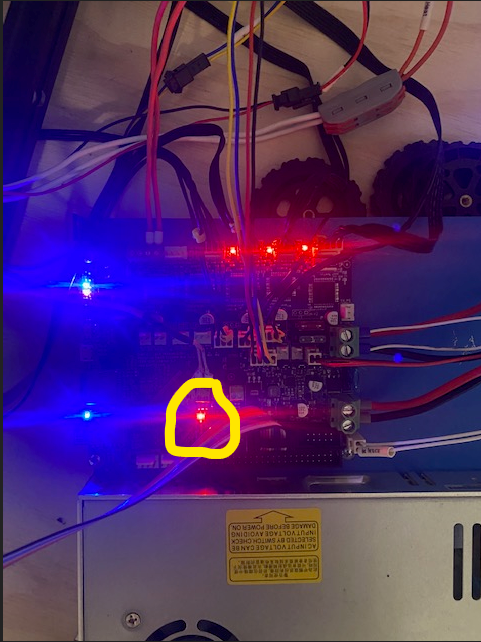
-The fault and errors I get are with the Hotend, and I have a red LED light on my daughterboard and next to the LED it says the word "Fault" (so I assume it means when lit, there's a fault)
-It seems when I try to home any axis, they're going in the wrong direction, and then end up running into the opposite end of where the endstops are resulting in me E Stopping it. So I figure in my firmware somewhere it's either an issue of motors set in the wrong direction, the wiring is wrong, or the build plate parameters are wrong and it thinks the bed is longer than it is. Or I'm way off base...not sureI'll include screenshots of everything
Lights working on duet board
Temp Fault
Temp Reading Error

Hotend Fault
Error codes
Endstops in config.g

Thanks,
-Carson
-
For the fans always being at 100%.
What are the fans? What voltage?
What ports are they connected to?
What setting is the voltage selection jumper set to?
The photo of the board is too blurry I can't make out any detail.Sensor short to other wiring is pretty self explanatory. It thinks you have a short in your wiring, so best to double check that carefully.
What daughterboard is it specifically? The config.g says it's configured as a thermocouple. Is it actually a thermocouple? Is the thermocouple wiring extended at all?
In your screen shot of DWC it showed what looked like room temperature being displayed for the hotend. So it seems to be working at first at least. What temp are you trying to heat to? How have you commanded it?
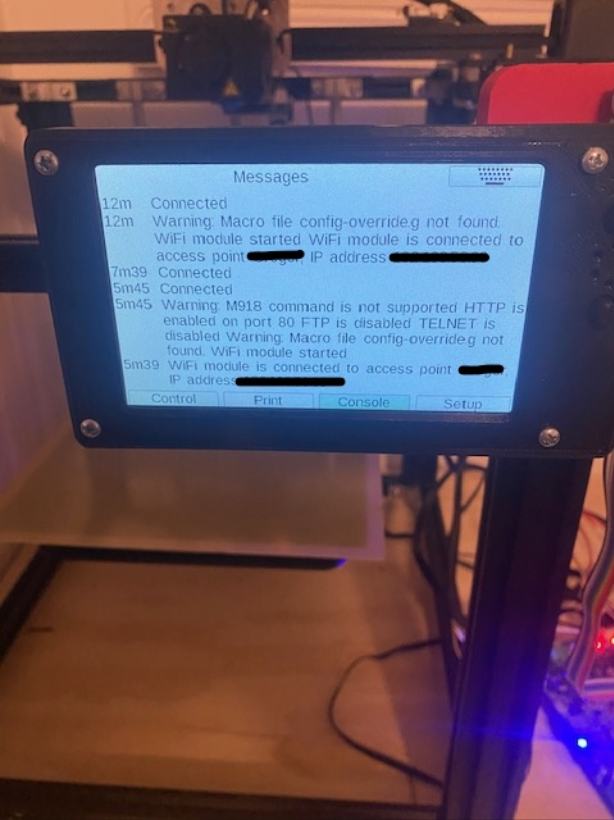
The warning about the M918 command is because you have an M918 command in your config.g to configure a rotary encoder display but that's not supported on duet wifi. So should delete that line.
The waring about config-override.g not found just means that you haven'd done a PID tuning and saved the results with M500 yet. That will go away once you do.
-
@phaedrux
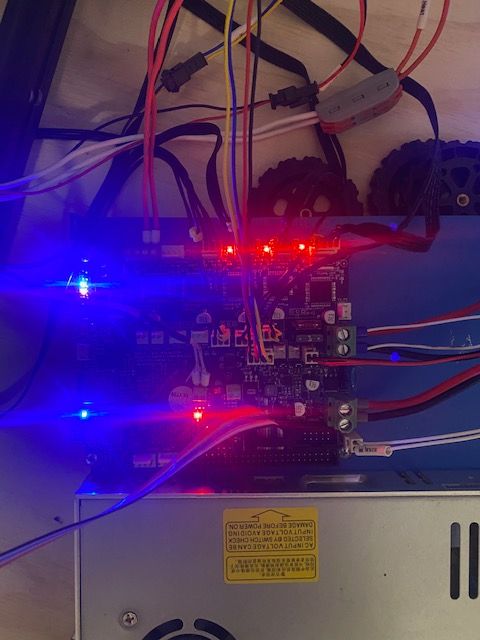
I'll include a better picture of the board.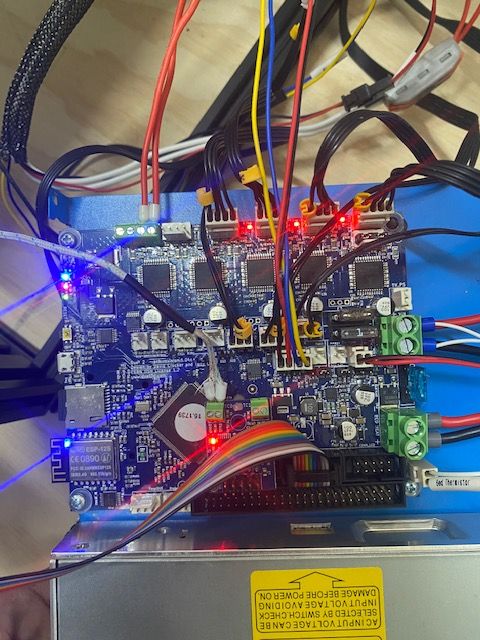
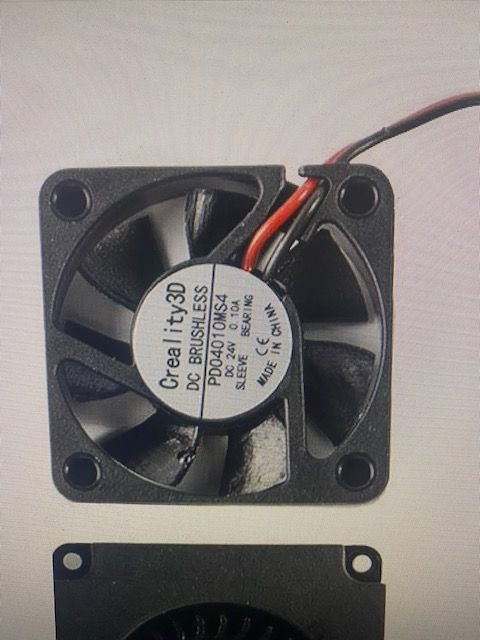
I'll include pictures of my fans. the first two pictures are my hardware cooling fans. the larger black one I repurposed from another PSU. and then the small clear one was an upgraded hardware cooling fan I swapped with the stock fan. the small one is plugged into the Always on ports and the larger one is wired directly into the board with power from the VIN. (two white wires with blue ferrules)


As for my part cooling fans, I have the 2 that came stock with the printer, and those are plugged into the PMW ports
-Yellow and blue into Fan 1 port- Black and Red into Fan2 port

"What setting is the voltage selection jumper set to?"...not sure what that is or what you mean? I don't have a buck converter or booster on this board in case that's what you were referring to.
Here's the daughterboard
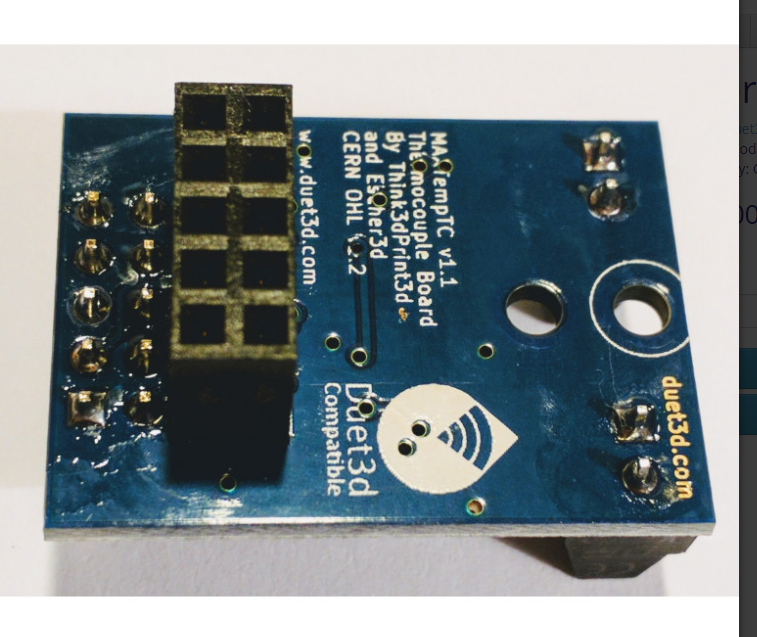
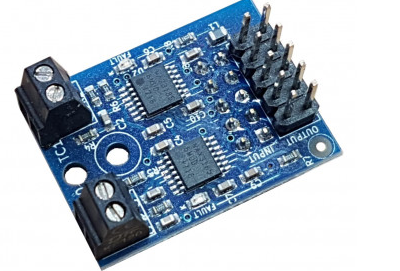
-Thermistor/Thermocouple: Type K Thermocouple (I think MAX31856 on CS1 or CS2, not sure which)
-The wire is not extended
As for the Hotend, I commanded it to max out at 350c, I'm trying to test for 210 just to see if everything was working
I'll delete that line when I get home from work
*What's PID tuning?
Thanks
-Carson
- Black and Red into Fan2 port
-
For the fan you've got connected directly to VIN, why not connect it to the second always on fan port? Then you have the benefit of the fuse protection at least.
For the PWM fan ports, you have them connected to fan1 and fan2, but fan0 is empty. It's recommended to use fan0 as the part cooling fan, and fan1 as the hotend heatsink fan.
So move the yellow and blue wired blower to fan0 for the part cooling, and the red and black wire 40mm fan to fan1 for the hotend heatsink. That seems to be the way it's configured in your config.g anyway.
The fan voltage selection jumper is the little jumper block right in front of the fan ports. I can see in your new photo that it is set to use VIN, so 24v, which matches your fans. That's all good.
For the thermocouple it looks like it's configured correctly and seems to be reading room temp ok. We're you able to pull the wiring and re-check it?
-
How do I PID Tune? So like set the temp to 350c wait until it gets there and then let it turn off and then back on again at its minimum temp., and then save that somehow??
I deleted the M918 line.
Ok. So.
-The fans are all connected and in the right ports. They work and are reacting to being adjusted
-The Fault LED went off on the daughterboard after I readjusted them
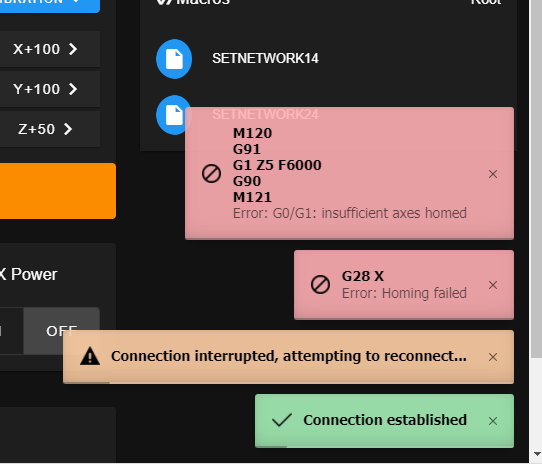
-I tested the bed and the Hotend and both are working and reaching the desired temps*Now as for the Homing, how do I even do that from scratch? i just tried to home X and the motors were running in the wrong direction. What do I change in the code to make the motors go in the right direction. I had to E Stop it.
Here are the Errors I got when I tried to home X
Thanks,
-Carson
-
https://duet3d.dozuki.com/Wiki/Tuning_the_heater_temperature_control
In short though, you send
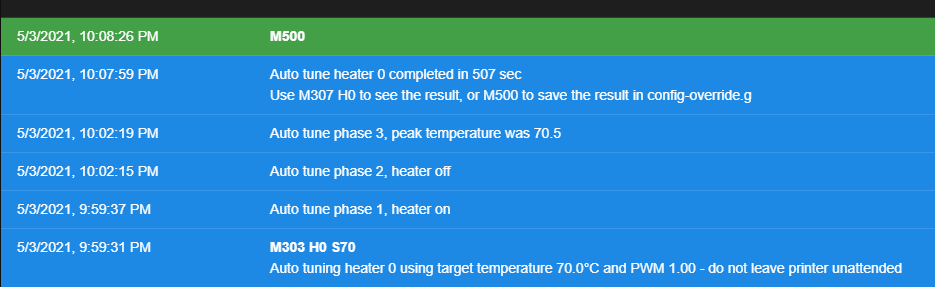
M303 T0 S250for the hotend and wait while it works. For the bed, sendM303 H0 S70and wait. Where S is the temp you will be printing at. Then after it's done tuning send M500 to save the results.Good to see we're making some progress.
For the motor directions I'll link you do a test sequence that ill help walk you through figuring out the correct motor directions etc.
Basically though, you manually move the print head and bed to their center positions and then send G92 X100 Y100 to tell the firmware it's homed and at that location so you can jog the axis around.
When looking at the printer from the front, the 0,0 position would be in the front left corner of the bed. +x should move to the right, -x should move to the left, +y should move back, -y should move to the front.
If the axis aren't moving in those directions the direction of rotation of that motor would need to be changed in M569.
With that in mind, where are your endstops located? X would be either left (-) or right (+), y would be front (-) or back (+).
Will need to know that detail to make sure the M574 command reflects the correct location of the endstops. Then in your homing files the homing moves would need to move towards the endstop, so either in the positive or negative direction.
https://duet3d.dozuki.com/Guide/Ender+3+Pro+and+Duet+Maestro+Guide+Part+3:+Commissioning/39
-
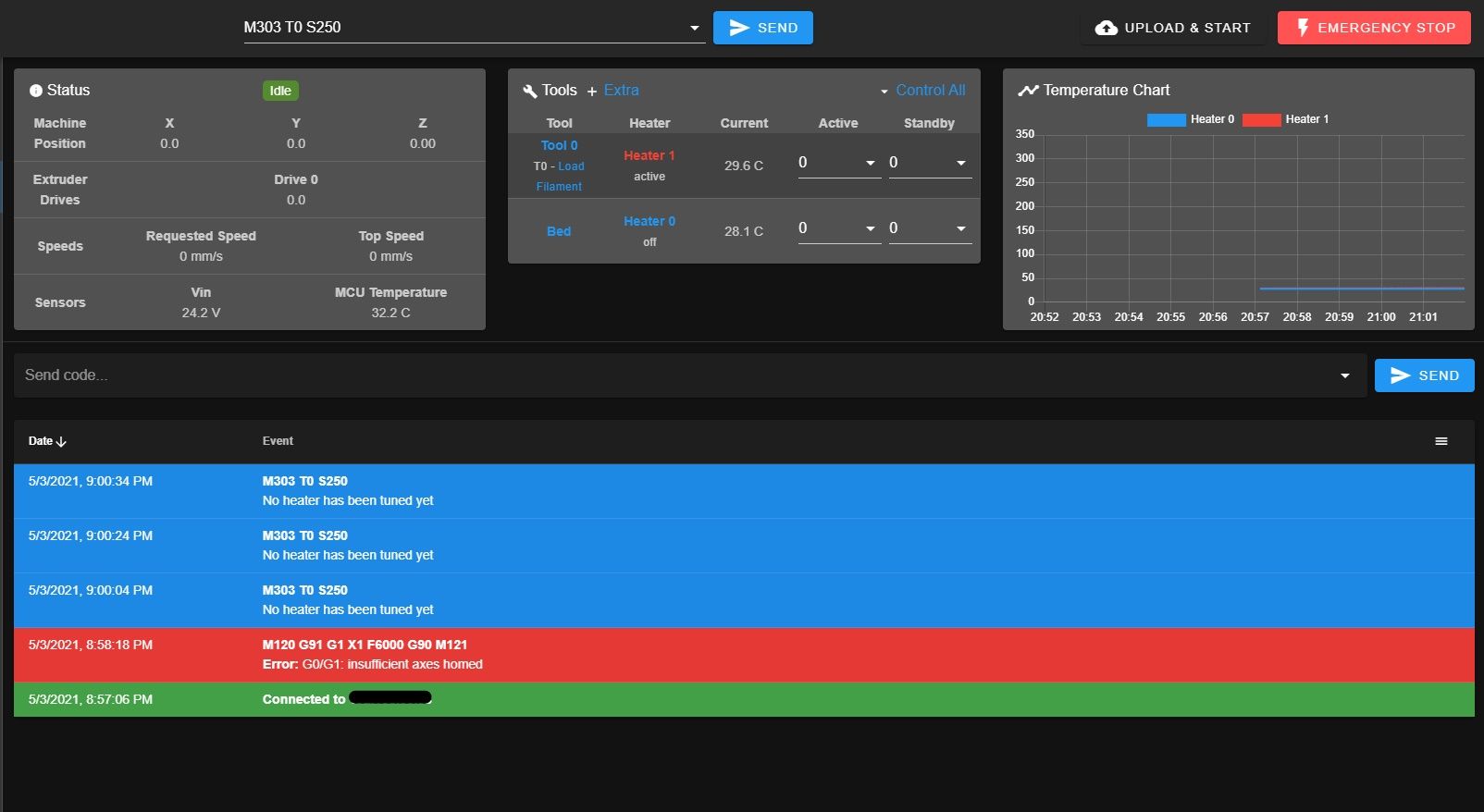
This is what happened when I ran M303 T0 S250
*Also should I use those exact parameters for the test?
So do I move the print head and bed literally to the center, or to 0,0 (front and to the left)? What if I want the homed location to be in the back right, is that possible? That's how it was before I got the duet board.
So it wont let me test the +/- directions until it's been homed, so how do I know if the are going in the right direction or not? When I move the printer head manually the DWC doesn't reflect the movements being made.
So I hit X Home and it goes left for example.
-X endstop is on the right
-Y endstop is on the back rightThanks,
-Carson
-
Sorry, I forgot you are still on RRF 2.05. You'll need to use M303 H1 S250 for the hotend. And M303 H0 S70 for the bed.
@pcnoobneedsmajorhelp said in HELP! Duet 2 WiFi Configuration and DWC Upload???:
So do I move the print head and bed literally to the center, or to 0,0 (front and to the left)? What if I want the homed location to be in the back right, is that possible? That's how it was before I got the duet board.
Move it there by hand and send the M92 command just to allow the test to see what directions they move. It's just for the test, nothing permanent.
-
Once you have confirmed the movement direction you'll need to make these changes to get homing working correctly.
@pcnoobneedsmajorhelp said in HELP! Duet 2 WiFi Configuration and DWC Upload???:
So I hit X Home and it goes left for example.
-X endstop is on the right
-Y endstop is on the back rightYou'll need to change a line in config.g to setup the endstops.
M574 X1 Y1 Z1 S1would becomeM574 X2 Y2 Z1 S1your homing files would change to become:
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v3.2.3 on Sat May 01 2021 17:31:12 GMT-0700 (Pacific Daylight Time) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X240 Y240 F3000 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X-5 Y-5 F6000 ; go back a few mm G1 H1 X240 Y240 F240 ; move slowly to X and Y axis endstops once more (second pass) G1 H1 Z-315 F240 ; move Z down stopping at the endstop G90 ; absolute positioning; homex.g ; called to home the X axis ; ; generated by RepRapFirmware Configuration Tool v3.2.3 on Sat May 01 2021 17:31:12 GMT-0700 (Pacific Daylight Time) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X240 F3000 ; move quickly to X axis endstop and stop there (first pass) G1 H2 X-5 F6000 ; go back a few mm G1 H1 X240 F240 ; move slowly to X axis endstop once more (second pass) G1 H2 Z-5 F6000 ; lower Z again G90 ; absolute positioning; homey.g ; called to home the Y axis ; ; generated by RepRapFirmware Configuration Tool v3.2.3 on Sat May 01 2021 17:31:12 GMT-0700 (Pacific Daylight Time) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Y240 F3000 ; move quickly to Y axis endstop and stop there (first pass) G1 H2 Y-5 F6000 ; go back a few mm G1 H1 Y240 F240 ; move slowly to Y axis endstop once more (second pass) G1 H2 Z-5 F6000 ; lower Z again G90Basically just flipped the direction of the X and Y moves so that they go towards the endstops.
-
Ok. So.
-M92 Command failed
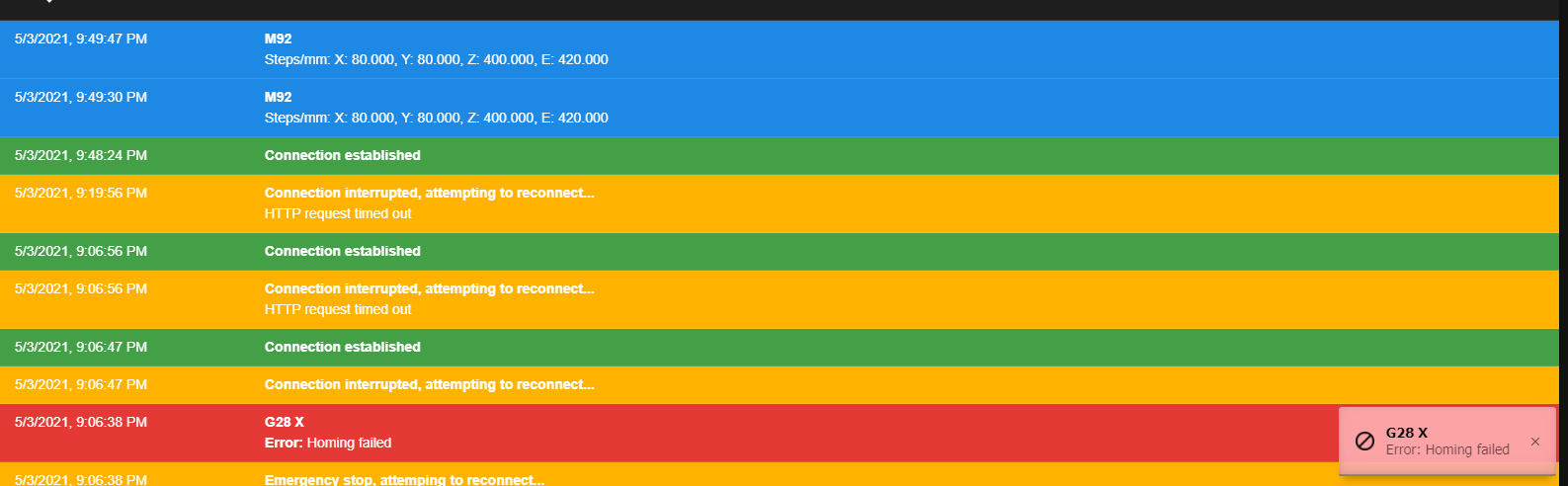

-The Bed Tuning was a success so I type M500 and hit enter
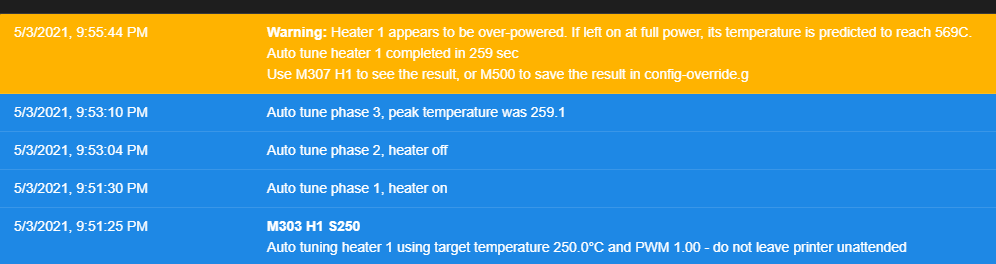
-In theory the Hotend test worked but I didn't save it because of this warning I got. I thought I'd check with you before I saved it
-I haven't made any changes to config.g just yet
Thanks,
-Carson
-
@phaedrux said in HELP! Duet 2 WiFi Configuration and DWC Upload???:
G92 X100 Y100
Not m92. G92. As above.
The warning is just that. A warning. It's letting you know how hot it could get in a failure situation. Take precautions and understand what that temp is capable of.
-
Ah, my bad. I was looking at the wrong post.
Ok. So.
-Hotend tuned and saved
-G92 X100 Y100 entered and the results came out +X to the right, -X to the left, +Y to the back and -Y to the front. I haven't checked Z yet but if these are correct I'll just assume that is too.
-I did notice though, that 0,0 isn't all the way to the left and all the way to the front, is that normal for the test or is that my new build plate size or something? that's a stupid question probably haha.*Should I still send the new M574 codes for the endstops?
Thanks,
-Carson
-
Motor directions look correct.
The 0,0 point will be correct once the axis are actually homed.
So you'll need to change the M574 and homing files as I indicated above first. Then you should be able to use the homing buttons to home the axis correctly and then jog the printer around and maybe even do an actual print.
-
Ok. So.
-I changed the M574 line in config.g and changed the other values in their respective areas.
-Was able to Home X and Y
-Z is going in the opposite direction of the endstop and will not home.*I assume I'll go into config.g and change Z1 to Z2 and then under homeall.g and homez.g I just change the - to + or vise versa?
So after I am able to home all 3, then can I jog the x, y, and z to where I want them and then home them again...or, how does that work exactly?
Thanks,
-Carson
-
@pcnoobneedsmajorhelp said in HELP! Duet 2 WiFi Configuration and DWC Upload???:
*I assume I'll go into config.g and change Z1 to Z2 and then under homeall.g and homez.g I just change the - to + or vise versa?
No. You need to change the direction of rotation of the Z motor in M569 for the Z driver.
M569 P2 S1 ; physical drive 2 goes forwardsChange that to S2