problèmes duet 3 mini5+ coreXY
-
little update
the noise and became much more acute and my z axis managed to put this in possition for homing but my bltouch does not activate.
for the XY axes it is always pariel "except the noise which is more acute"
Is there a way to send yourself a video to help you solve the problem?
-
@foukouda You can't post a video directly on the forum. Upload it to YouTube or similar, post a link.
You posted your config.g, but didn't post the other information I requested. If you've changed your config.g, please post it again. As I asked before, please also post your homeall.g files, send M122 and post the response, and send M98 P'config.g' and post the response. A picture of your machine and wiring to the Duet, and make and model number of the stepper motors may help, too.
Ian
-
this is config.g :
; Configuration file for Duet 3 Mini 5+ (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Fri Jul 02 2021 10:07:21 GMT+0200 (heure d’été d’Europe centrale); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"dimitry printer" ; set printer name
M669 K1 ; select CoreXY mode; Network
M551 P"dimitry" ; set password
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.0 S0 ; physical drive 0.0 goes backwards
M569 P0.1 S0 ; physical drive 0.1 goes backwards
M569 P0.4 S1 ; physical drive 0.4 goes forwards
M584 X0.3 Y0.2 Z0.0:0.1 E0.4 ; set drive mapping
M350 X16 Y16 Z16 E64 I0 ; configure microstepping without interpolation
M92 X160.00 Y160.00 Z6400.00 E409.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X1600 Y1600 Z1600 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X400 Y400 Z465 S0 ; set axis maxima; Endstops
M574 X1 S1 P"io6.in" ; configure active-high endstop for low end on X via pin io6.in
M574 Y2 S1 P"io5.in" ; configure active-high endstop for high end on Y via pin io5.in
M574 Z2 S2 ; configure Z-probe endstop for high end on Z; Z-Probe
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
M558 P9 C"io3.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
M558 H30 ;*** Remove this line after delta calibration has been done and new delta parameters have been saved
G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:215 S20 ; define mesh grid; Heaters
M308 S0 P"temp0" Y"pt1000" R2200 ; configure sensor 0 as PT1000 on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"pt1000" R2200 ; configure sensor 1 as PT1000 on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and stanby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power lossthis is homeall.g :
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Thu Jul 01 2021 14:21:20 GMT+0200 (heure d’été d’Europe centrale)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-405 Y-405 F1800 ; move quickly to X or Y endstop and stop there (first pass)
G1 H1 X-405 ; home X axis
G1 H1 Y-405 ; home Y axis
G1 X5 Y5 F6000 ; go back a few mm
G1 H1 X-405 F360 ; move slowly to X axis endstop once more (second pass)
G1 H1 Y-405 ; then move slowly to Y axis endstop
G1 H1 Z505 F360 ; move Z up stopping at the endstop
G90 ; absolute positioning
G92 Z500 ; set Z position to axis maximum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioningthis is the M122 :
)
Board ID: 7LB4M-Y096U-D65J0-40KM2-2713Z-ZMJD7
Used output buffers: 16 of 40 (40 max)
=== RTOS ===
Static ram: 97472
Dynamic ram: 133036 of which 828 recycled
Never used RAM 29784, free system stack 196 words
Tasks: NETWORK(ready,194) HEAT(suspended,316) TMC(blocked,65) MAIN(running,446) IDLE(ready,20) AIN(blocked,264)
Owned mutexes:
=== Platform ===
Last reset 00:04:50 ago, cause: power up
Last software reset at 2021-07-02 13:38, reason: User, GCodes spinning, available RAM 29784, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00430000 BFAR 0xe000ed38 SP 0xffffffff Task MAIN
Error status: 0x04
Supply voltage: min 24.2, current 24.2, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 475, writes 0, timeouts 0, DMA errors 0
Driver 1: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 475, writes 0, timeouts 0, DMA errors 0
Driver 2: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 474, writes 0, timeouts 0, DMA errors 0
Driver 3: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 474, writes 0, timeouts 0, DMA errors 0
Driver 4: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 475, writes 0, timeouts 0, DMA errors 0
Driver 5: position 0, assumed not present
Driver 6: position 0, assumed not present
Date/time: 2021-07-02 14:14:15
Slowest loop: 7.99ms; fastest: 0.11ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 0.7ms, write time 0.0ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 169, MinFreeDm: 169, MaxWait: 0ms
Bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, StepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, StepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 201.77ms; fastest: 0.09ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8- WiFi -
Network state is active
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 3
WiFi firmware version 1.24beta2-05b1
WiFi MAC address f4:cf:a2:6f:be:e2
WiFi Vcc 3.40, reset reason Power up
WiFi flash size 2097152, free heap 24608
WiFi IP address 192.168.1.69
WiFi signal strength -65dBm, mode none, reconnections 0, sleep mode modem
Clock register 00002002
Socket states: 0 0 0 0 0 0 0 0
=== CAN ===
Messages sent 0, send timeouts 0, longest wait 0ms for type 0, free CAN buffers 15
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.2-beta3.2+1 running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: 7LB4M-Y096U-D65J0-40KM2-2713Z-ZMJD7
Used output buffers: 29 of 40 (40 max)
=== RTOS ===
Static ram: 97472
Dynamic ram: 133036 of which 828 recycled
Never used RAM 29784, free system stack 196 words
Tasks: NETWORK(ready,194) HEAT(suspended,316) TMC(blocked,65) MAIN(running,446) IDLE(ready,20) AIN(blocked,264)
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 00:04:50 ago, cause: power up
Last software reset at 2021-07-02 13:38, reason: User, GCodes spinning, available RAM 29784, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00430000 BFAR 0xe000ed38 SP 0xffffffff Task MAIN
Error status: 0x04
Supply voltage: min 24.2, current 24.2, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 36, writes 0, timeouts 0, DMA errors 0
Driver 1: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 36, writes 0, timeouts 0, DMA errors 0
Driver 2: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 36, writes 0, timeouts 0, DMA errors 0
Driver 3: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 36, writes 0, timeouts 0, DMA errors 0
Driver 4: position 0, standstill, SG min/max 0/0, read errors 0, write errors 0, ifcnt 9, reads 36, writes 0, timeouts 0, DMA errors 0
Driver 5: position 0, assumed not present
Driver 6: position 0, assumed not present
Date/time: 2021-07-02 14:14:15
Slowest loop: 7.46ms; fastest: 0.11ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 0.7ms, write time 0.0ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 169, MinFreeDm: 169, MaxWait: 0ms
Bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, StepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, StepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 199.77ms; fastest: 0.29ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8 - WiFi -
Network state is active
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 4
WiFi firmware version 1.24beta2-05b1
WiFi MAC address f4:cf:a2:6f:be:e2
WiFi Vcc 3.40, reset reason Power up
WiFi flash size 2097152, free heap 24608
WiFi IP address 192.168.1.69
WiFi signal strength -63dBm, mode none, reconnections 0, sleep mode modem
Clock register 00002002
Socket states: 0 0 0 0 0 0 0 0
=== CAN ===
Messages sent 0, send timeouts 0, longest wait 0ms for type 0, free CAN buffers 15
this is M98 P'config.g' :
M98 PCONFIG.G
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Warning: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 365C
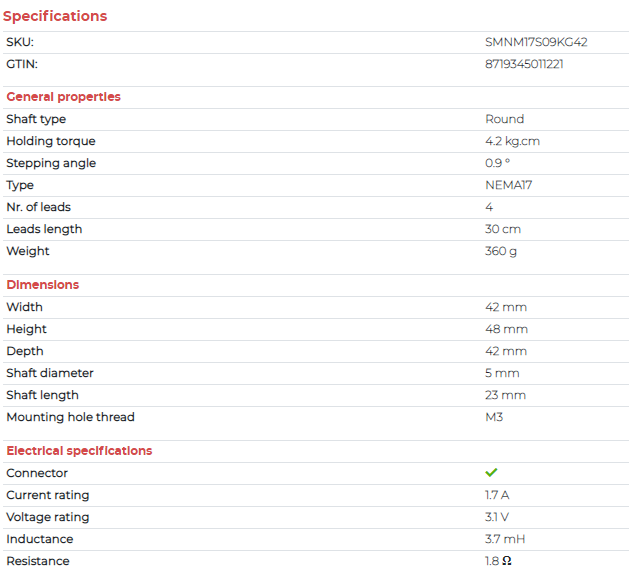
Warning: Macro file config-override.g not foundfor the motor is :
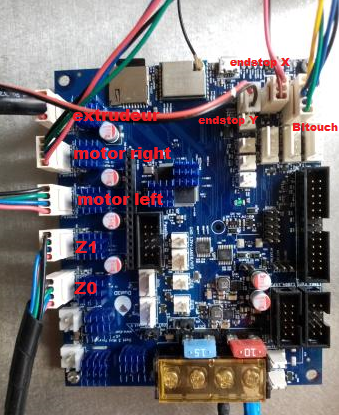
for the wiring :
- WiFi -
-
@foukouda said in problèmes duet 3 mini5+ coreXY:
RepRapFirmware for Duet 3 Mini 5+ version 3.2-beta3.2+1
This is the firmware version you are currently on. It would be worth updating to the current 3.3 release. From https://github.com/Duet3D/RepRapFirmware/releases/tag/3.3 download the "Duet2and3Firmware-3.3.zip" file, and upload it to the Duet, as a zip file, in DWC on System > Upload a system file.
Your motors are rated at 1.7A, and you are running them at 1.6A. We recommend running motors at 80% to 85% of their rated current maximum, so you should run them at 1.4A. So change
M906 X1600 Y1600 Z1600 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
to
M906 X1400 Y1400 Z1400 E800 I30 ; set motor currents (mA) and motor idle factor in per centReducing the current will reduce the noise, and the stepper motors shouldn't get hot at this setting.
Can you send
M569 P0.3and post the response? This will show how the X drive is set up. Most likely it is changing modes of operation from stealthChop (quiet) to spreadCycle (noisy) at the default speed, which may cause a bang and be noisy when moving.At the moment, your homing is using a Z endstop at maximum Z, not the probe, for homing:
G1 H1 Z505 F360 ; move Z up stopping at the endstop
G90 ; absolute positioning
G92 Z500 ; set Z position to axis maximum (you may want to adjust this)But you need to check the probe works first, before changing this. To test the probe, see https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe
Then change the lines in homeall.g (and homez.g) to:
G90 ; absolute positioning G1 X200 Y200 F6000 ; go to first bed probe point and home Z G30 ; home Z by probing the bedIan
-
@droftarts said in problèmes duet 3 mini5+ coreXY:
et téléchargez-le sur Duet, sous forme de fichier zip
M569 P0.3
Drive 3 runs forwards, active low enable, step timing fast, mode stealthChop, ccr 0x00053, toff 3, tblank 0, hstart/hend/hdec 5/0/0, pos 8, tpwmthrs 2000 (2.3 mm/sec), pwmScaleSum 15, pwmScaleAuto 0, pwmOfsAuto 36, pwmGradAuto 14 -
here is a video that can help you
https://youtu.be/4i8183o3-NU -
@foukouda I can't really tell what's happening in the video. It looks like you are clicking Home X? It sounds like the motors are trying to move very fast. Have you tried testing the motors disconnected from the machine? Have you checked that the motor phases are connected correctly? See https://duet3d.dozuki.com/Wiki/Choosing_and_connecting_stepper_motors#Section_Using_the_internal_drivers and https://duet3d.dozuki.com/Wiki/Choosing_and_connecting_stepper_motors#Section_Identifying_the_stepper_motor_phases
Ian
TronXY X5S with Duet 3 MB6HC and Roto toolboard : Cartesian bed-slinger with Duet 3 Mini 5+ WiFi and 1LC : RRP Fisher Delta v1 with Duet 2 Maestro : Polargraph with Duet 2 WiFi
-
I think I'm going to start from zero take it into account your note.
do you think you can provide me some kind of schema code for coreXY 3d printer on which i can base myself?Thanks for your help
-
This may help: https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareCoreXYPrinter
First step would be to identify the motor phase pairs first to ensure the motors are wired correctly. Then in that corexy setup link there are motor tests to perform to determine the correct configuration.
-
hello I just did what you told me and I could see the problem
when I run a command only 1 motor is running. suddenly I checked that the driver was not broken by exchanging the cables is not that. in addition to that I checked the polarity of my motor and it is well doneI will try to make a video to show you
something else my printer is a BLV mgn Cube this can help
-
Hell I have the impression that the printer thinks to be a Cartesian printer yet in the config it is marked

-
Are you getting any errors when you try to command the motor that doesn't work?
Which motor/driver isn't working?
-
This post is deleted! -
This post is deleted! -
no I have no error message when I execute the command
and it is motor for X that does not work -
So if driver3/X motor isn't working, can you swap X and Y and change the driver mapping in config.g as well and retest? Does the problem follow the motor, or stay with the driver?
-
@phaedrux suddenly I did what you ask me and I stink noticed that it is always the engine designed as the X engine that has problems and I can certify that all my engines are well connected and that all my drivers are working correctly
-
@foukouda said in problèmes duet 3 mini5+ coreXY:
M350 X256 Y256 Z256:256 E64 I0 ; configure microstepping without interpolation
M92 X2560.00 Y2560.00 Z12800.00:12800.00 E409.00 ; set steps per mmUsing x256 microstepping for all axis is not recommended because it can exceed the capabilities of the CPU to keep up with step generation. Best to use x16 with interpolation.
@foukouda said in problèmes duet 3 mini5+ coreXY:
@phaedrux suddenly I did what you ask me and I stink noticed that it is always the engine designed as the X engine that has problems and I can certify that all my engines are well connected and that all my drivers are working correctly
Do you mean it's working correctly now?
-
@phaedrux hello. It's been two weeks since I try anything and everything. and I can confirm that the problem comes from the programming and not from the wiring or the mechanical side (motor, driver, ext belt)
for more precision
when I run the G91 command
G1 H2 X10 F3000 this one runs as it should.
but not the command
G91
G1 H2 X10 F3000
and it does the same as in the video that I stink sent -
@foukouda suddenly I would like to ask you if you can make me a customized program I think you are the best for that
(if you don't mind) thank you very much for taking the time to help me