Configure dual extruder via expansion board
-
@jay_s_uk I believe, you need to re-read the post and understand that I am not reporting a bug on the version being used. Instead I am asking about configuring the motors of a dual extruder via expansion 1XD. I am guessing you are wise enough to reply a question in a civilized way for the forum users and not spam their posts with sarcasm.
-
@jayt and there have been a number of fixes since then to CAN communications so what are you trying to achieve by flagging DC42 and Phaedrux?
edit: you're config looks fine in its isolated condition but as always a full config is needed
-
Please post your full config and the results of M122 and M98 P"config.g" once you've updated to 3.3 or 3.4 Beta3 and tested again.
-
@Phaedrux @jay_s_uk : Thank you for confirming on config posted so far.
I have already tried with 3.4beta2, prints sometimes hanged in between and one of the posts mentioned the issue as well
https://forum.duet3d.com/topic/24683/3-4beta2-motors-hang/6?_=1630040704353.
If this is resolved with 3.4beta3, I will flash and get back to you guys with required details , if the second motor issue still persists -
@jayt yes, that's fixed in beta 3
-
@jay_s_uk : with 3.4 beta3 as well, the second extruder from the board B41 does not work.
Observations so far:
pins on the 1XD-board itself don't show any signal. For B40 (driving motor 1 of extruder), I am able to read signal on the pins, when I select the extruder and do extrusion.I will share other details by EOD, after doing some checks.
Meanwhile, can you suggest anything that I need to cross check in config? Any condition/instruction not set that may restrict 2nd motor?
(Also in my previous reply for 3.4beta2, I wasn't using dual extruder) -
@jayt i assume you have a G4 S2 or similar in your config.g before any expansion boards are referred to?
Might be worth posting your whole config so we can have a quick look over
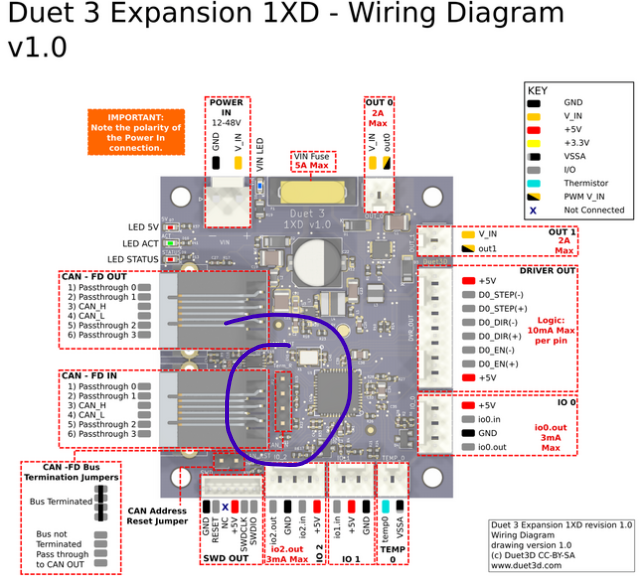
and what are the arrangements of these jumpers on both 1XD boards?
-
I have attached the config file.
NOTE:- IF I run M115 B40 or M115 B41, I get positive response. both communicate well & the LEDs blinking is in sync. Same 3.4 beta3 on all boards.
- Also I noticed, if I configure single board with B40 address and run the second extruder it works. So this confirms no problem with second motor or the board. Something in config is weird?
- I haven't used G4 commands.
NOTE: config is too raw, just for trial purpose. main purpose is to try running dual extruder via exp- 1XDs. - B40 (no jumpers), B41-XD : jumper on CAN-FD-OUT.
Mainboard to B40 in -> B40 out -> B41-in-> Jumper on the B41-out. - I tried removing all jumpers too to see just in case it works.
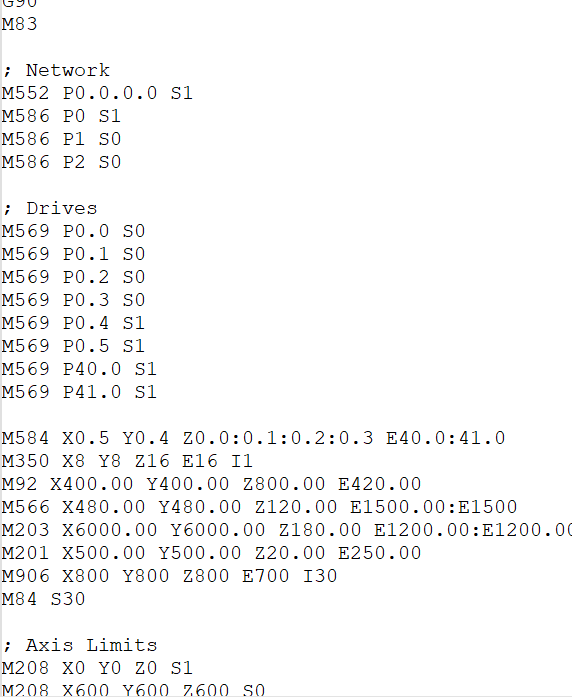
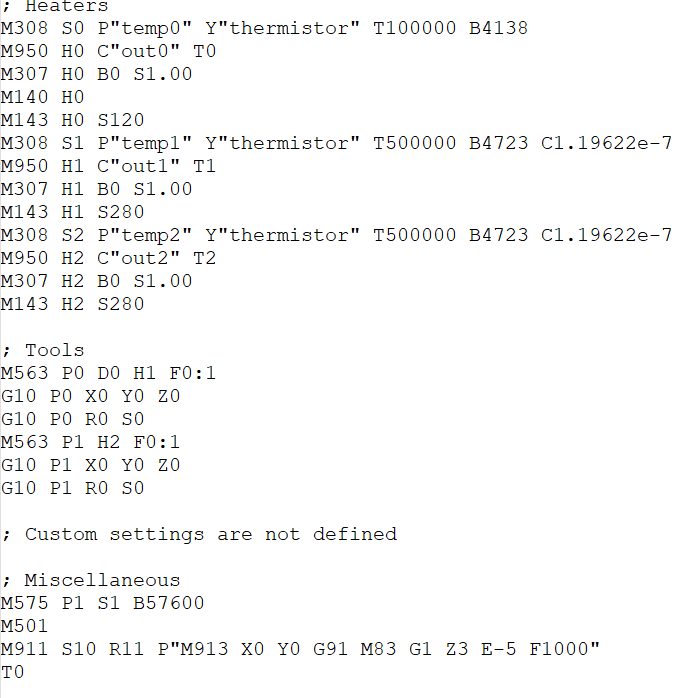
(not able to upload file , so pasted images of the config).
-
observation 6: No hiccups, no timeouts.
additionally, I tried to run Extruder from B40 and monitor pin signals for motor. I receive signal for 1XDBoard 40 but not for 1XDboard 41 pin, when I run extruder 2 -
@jayt add
G4 S2after the network settings. (the M586 lines)
Its required when using CAN connected boards. -
@jayt also, your M563 for the second tool is missing
D1so it won't use an extruder
And you've also got fans listed for your tools but I didn't see them in your config -
Thank you !!!!!
I guess it was more of the D1' missing in the line with M563.
I haven't configured fans yet.Can you explain why G4 S2 is must for CAN connected boards?
-
@jayt to give them time to establish a link with the main board and get in sync ready to accept commands as sometimes, config.g is ran before they are ready.
they recommend S1 here but i've seen reports where 1 second isn't enough so I usually recommend S2 (2 seconds)
https://duet3d.dozuki.com/Wiki/Duet_3_Tool_Board#Section_Startup_Time -
@jay_s_uk : ok got it. you can mark this thread as Solved.
Thank you again!