4 endstops for 4 z stepper motor and 3D Touch possible?
-
Are you perhaps getting some interference with the wiring for that endstop?
How can you tell that io2.in is always activated?
-
-
@duncan the number 2 doesn't correspond to IO2, it corresponds to the 3 endstop created for the system (when the numbering starts at 0). In this instance, thats your endstop(s) for z
-
@jay_s_uk but I have 4 endstops defined
M574 Z1 S1 P"io3.in+io4.in+io5.in+io6.in"So it's not possible to see the status of each endstop when we use more than one for one axis?
Then I think the problem is that the one on io5.in that is the motor number 4
M584 X40.0 Y41.0 Z1:2:4:5 E20.0appears to be always triggered...
-
@duncan they are for a global axis though, not 4 individual axes.
If you unplug the endstop on IO5 does it no longer show as triggered?
Does it then show as triggered when pressing each endstop?
If it does show as not triggered when IO5 is connected then I would be investigating the wiring on that endstop -
@jay_s_uk when I disconnect one endstop from the board is always triggered to true in normal case.
I tried disconnecting io5 and remains true, and disconnected all other 3 endstops and is true (that's normal), it was supposed to be false if they're connected and all working good.
So I really don't know where is the error, because the config file seems to be ok as far as I know...
-
@duncan what type of endstops are they?
How do you have the cables connected?
can you post a photo of the wiring at the endstop end? -
@jay_s_uk endstops are this https://www.digikey.es/product-detail/es/panasonic-industrial-automation-sales/PM-Y44/1110-2019-ND/3899551
the connection is this:
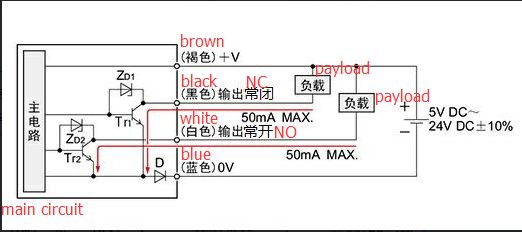
brown +V -> 5V_EXT
blue 0V - > GND
black output 1 LIGHT ON -> ioX.inWiring should be ok because X and Y axis are working fine... problem seems to be on the use of 4 pcs of endstops for one axis...
-
M584 X40.0 Y41.0 Z1:2:4:5 E20.0Is this correct? Do you have X and Y on separate toolboards?
<>RatRig V-Minion Fly Super5Pro RRF<> V-Core 3.1 IDEX k*****r <> RatRig V-Minion SKR 2 Marlin<>
-
@duncan are they all getting 5v and do the lights all go fully off (or on) when activated and not just dim?
-
@oliof yes, I have two extension boards, those motors and endstops are working fine, they have their own external control drivers.
@jay_s_uk yes, lights are working ok, now I have a differente situation I'm going to explain.
I put a backup of the config files before using 4 endstops for Z axis and only the probe for Z that was working fine, so machine was working good. Then I updated only the config.g with the one defined with 4 endstops and still good... all motors of Z moving and homming with the probe...
When I put the latest homez.g file the problem was again in the machine, so I made this change:
This is the homez.g with the initial problems
; homez.g ; called to home the Z axis ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Fri Sep 04 2020 14:49:01 GMT+0800 (中国标准时间) G91 ; relative positioning G1 H2 Z10 F6000 ; lift Z relative to current position ;G1 H2 X510 Y510 F6000 ; go to first probe point G1 H1 Z-99999 G90 ; absolute positioning G30 ; home Z by probing the bed - activar 3D Touch ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z10 F100 ; lift Z relative to current positiond ;G90 ; absolute positioningThis is the actual homez.g working somehow...
; homez.g ; called to home the Z axis ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Fri Sep 04 2020 14:49:01 GMT+0800 (中国标准时间) G91 ; relative positioning G1 H2 Z10 F300 ; lift Z relative to current position G90 ; absolute positioning G1 X510 Y510 F10000 ; go to first probe point G1 H1 Z-99999 ;G1 X510 Y510 F3000 ; go to first probe point G30 ; home Z by probing the bed ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z10 F300 ; lift Z relative to current positiond ;G90 ; absolute positioningSo the only main change is that I put G90 before the first probe point movement and Z axis moving down looking for endstops... (but not for the probe touching).
So I'm going to test now if once the machine hits the 4 endstops then go for the probe to touch the bed, that it's my objective, because I want to use the 4 endstops to calibrate the machine at the same heigh and then the probe for fine compensation of the bed.
But I don't know if that will work if all the movement on Z is on negative direction or I should put the 4 endstops on Z positive and probe for Z negative...