Torque Calculation as Percentage of Rated Current
-
@ctilley79 said in Torque Calculation as Percentage of Rated Current:
Lower current allow me to achieve faster speeds before back emf becomes the limiting factor.
Lowering the current is going to LOWER your torque, so I'm confused.
You should also look at the torque-vs-speed curve for your motor.
I think that's going to have a much greater influence on your maximum speed than back EMF. (Unless you have a low-voltage power supply.)
-
@alankilian said in Torque Calculation as Percentage of Rated Current:
Lowering the current is going to LOWER your torque, so I'm confused.
Exactly. lowering current will lower torque, but you get less back emf, so you can achieve higher speeds. However as you lower current, torque can drop to a point where you don't have enough power for fast acceleration moves. Here's output from Duets EMF calculator that shows what I'm talking about. Hence why I'm trying to find a reasonable tradeoff of both.
At 800ma current

At 1400ma current

-
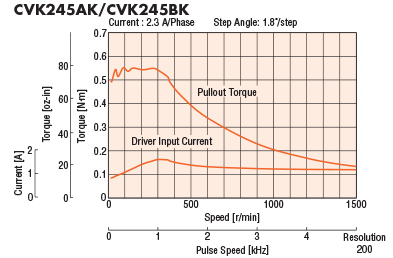
@ctilley79 Yes, that's the back EMF calculator, but what about the speed-vs-torque curve of the motor? I'm interested in knowing if there's a calculator that takes into account this curve also or if they all ignore it.
Here's one that says at 32,000 (16x) steps-per-second, you'll get only 65% of the maximum torque out of your motor.
Are you factoring in that curve also?
-
@alankilian a torque vs. speed curve is generally meaningless without the driver supply voltage being specified, because the ability of the driver to supply the requested current depends on the speed and supply voltage.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Sure that's true and important, but also see in the curve I posted that the torque drops even when the drivers are supplying the appropriate amount of current, so I think it's not the drivers, but rather the physics of the motor that cause the drop in torque IN THIS SITUATION..
So they BOTH matter, and if you've got a driver that can supply the required current at the speed you are moving, the torque-vs-speed curve is the ONLY one that matters.
So I agree and don't agree.
")
-
@alankilian said in Torque Calculation as Percentage of Rated Current:
Sure that's true and important, but also see in the curve I posted that the torque drops even when the drivers are supplying the appropriate amount of current, so I think it's not the drivers, but rather the physics of the motor that cause the drop in torque IN THIS SITUATION..
That's not entirely clear, because the graph shows only the driver input current, not the output current. If the motor is being loaded with the indicated torque, then the fact that the driver input current remains steady indicates that the output current is not remaining constant.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Hmmmmm.
If speed didn't matter, why do they all produce a chart like this?
This is the inductance-caused reduction in torque and you are talking about the voltage-caused reduction in torque (I think)Maybe you're saying this chart represents the back-EMF-induced reduction in torque?
-
@alankilian said in Torque Calculation as Percentage of Rated Current:
This is the inductance-caused reduction in torque and you are talking about the voltage-caused reduction in torque (I think)
They are almost the same thing. Inductance causes back emf, and that back emf is proportional to the full step rate and the motor current. Motion also causes back emf, and that back emf is also proportional to step rate (but not to motor current). If the driver supply voltage is insufficient to overcome the combined back emf, then the current must drop.
A complication is that when the motor is lightly loaded and the lag angle is low, the two sources of back emf are in phase; but when the load is high and the motor is on the point of skipping steps, they are 90deg out of phase.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 So back to the topic at hand. What's a good way to set current to achieve the highest speeds without losing running torque?
-
At speeds above the point of torque dropoff due to insufficient voltage, the current setting doesn't make any difference. Higher current will give more torque at lower speeds, but the point at which torque starts reducing and the motor becomes noisy will be reached at a lower speed.