Motors doesn't work on drives from Duex 5
-
Tried to connect my Z-stepper motors from Duet 2 Ethernet over to a Duex 5 (RRF 3.3).
The BL-touch works on the Duex as it should.
Only LED that is lit up is end stop nr.6.When I use M115 it only says Duet 2 wifi/ethernet, nothing about Duex (it should?).
FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 3.3 ELECTRONICS: Duet Ethernet 1.02 or later FIRMWARE_DATE: 2021-06-15 21:45:03Swapped the ribbon cable around, VIN-cable runs from Duet-board.
Here's my config.g
G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"ME4080" ; set printer name M669 K1 ; select CoreXY mode ; Drives M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S0 ; physical drive 3 goes backwards M569 P4 S0 ; physical drive 4 goes backwards M569 P7 S1 ; physical drive 7 goes forwards M569 P8 S1 ; physical drive 8 goes forwards M569 P9 S1 ; physical drive 9 goes forwards M584 X0 Y1 Z2:8:9 E3 ; set drive mapping M350 Z16 I0 ; configure microstepping without interpolation M350 X16 Y16 E16 I1 ; configure microstepping with interpolation M92 X100.00 Y100.00 Z400.00 E402.00 ; set steps per mm M566 X900.00 Y900.00 Z90.00 E3000.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z720.00 E12000.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z400.00 E4000.00 ; set accelerations (mm/s^2) M906 X1400 Y1400 Z1400 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout Tried induvidual settings for Z-steps Z-speeds and Z-currents (Z400.00:400.00:400.00 and so on)
Tried with Z-motors on drive 7, 8, 9 on Duex but I recieved error about temps probably because of nothing was connected to drive 2?
So I swapped over to be using 2, 8, 9 (ZA, E5, E6).
Can I put jumpers on both ZA/ZB and use 7, 8, 9 (E4, E5, E6) without error? -
-
@fcwilt
Not what I can find in console:M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.3 (2021-06-15 21:44:54) running on Duet Ethernet 1.02 or later Board ID: 08DGM-917NK-F2MSW-6JTD4-3S46M-TG48D Used output buffers: 1 of 24 (11 max) === RTOS === Static ram: 23876 Dynamic ram: 70740 of which 24 recycled Never used RAM 19776, free system stack 190 words Tasks: NETWORK(ready,24.9%,246) HEAT(delaying,0.0%,330) Move(notifyWait,0.1%,340) MAIN(running,74.0%,445) IDLE(ready,1.0%,29), total 100.0% Owned mutexes: === Platform === Last reset 00:01:32 ago, cause: power up Last software reset at 2022-03-05 00:05, reason: User, GCodes spinning, available RAM 19776, slot 0 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Step timer max interval 0 MCU temperature: min 27.4, current 33.2, max 33.4 Supply voltage: min 24.1, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Driver 0: position 0, standstill, SG min/max not available Driver 1: position 0, standstill, SG min/max not available Driver 2: position 0, standstill, SG min/max not available Driver 3: position 0, standstill, SG min/max not available Driver 4: position 0, standstill, SG min/max not available Driver 5: position 0 Driver 6: position 0 Driver 7: position 0 Driver 8: position 0 Driver 9: position 0 Driver 10: position 0 Driver 11: position 0 Date/time: 2022-03-05 02:41:06 Cache data hit count 3379310039 Slowest loop: 5.73ms; fastest: 0.17ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 3.5ms, write time 0.0ms, max retries 0 === Move === DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 5.81ms; fastest: 0.02ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 1 of 8 Interface state active, link 100Mbps full duplex -
@fcwilt
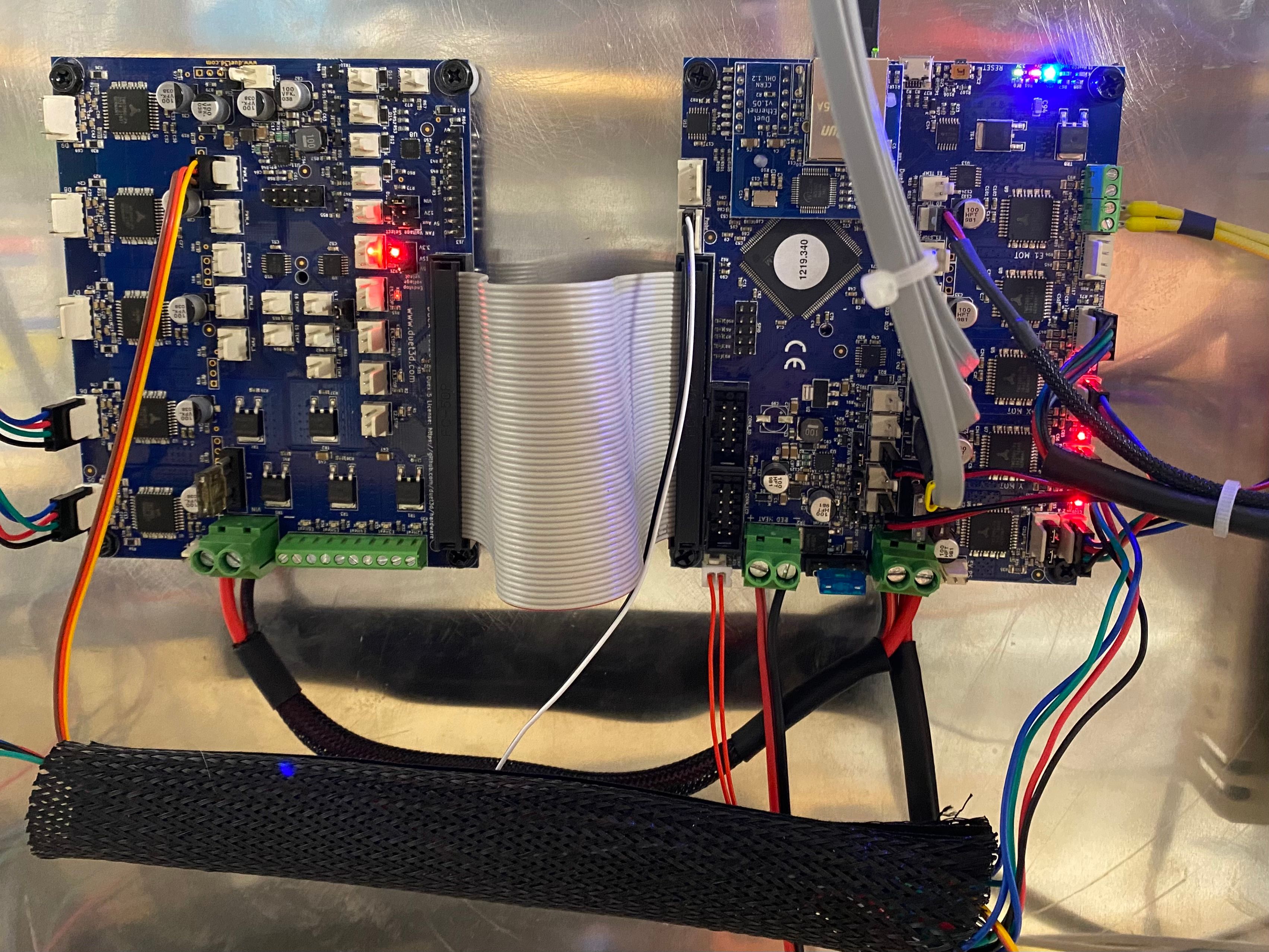
E.stop 6 lights up
E.stop 5 illuminates at half intensityEdit
6 turns off with no motor connected but 5 illuminates with everything disconnected, except VIN of course.")
-
Well the Duex5 should be listed.
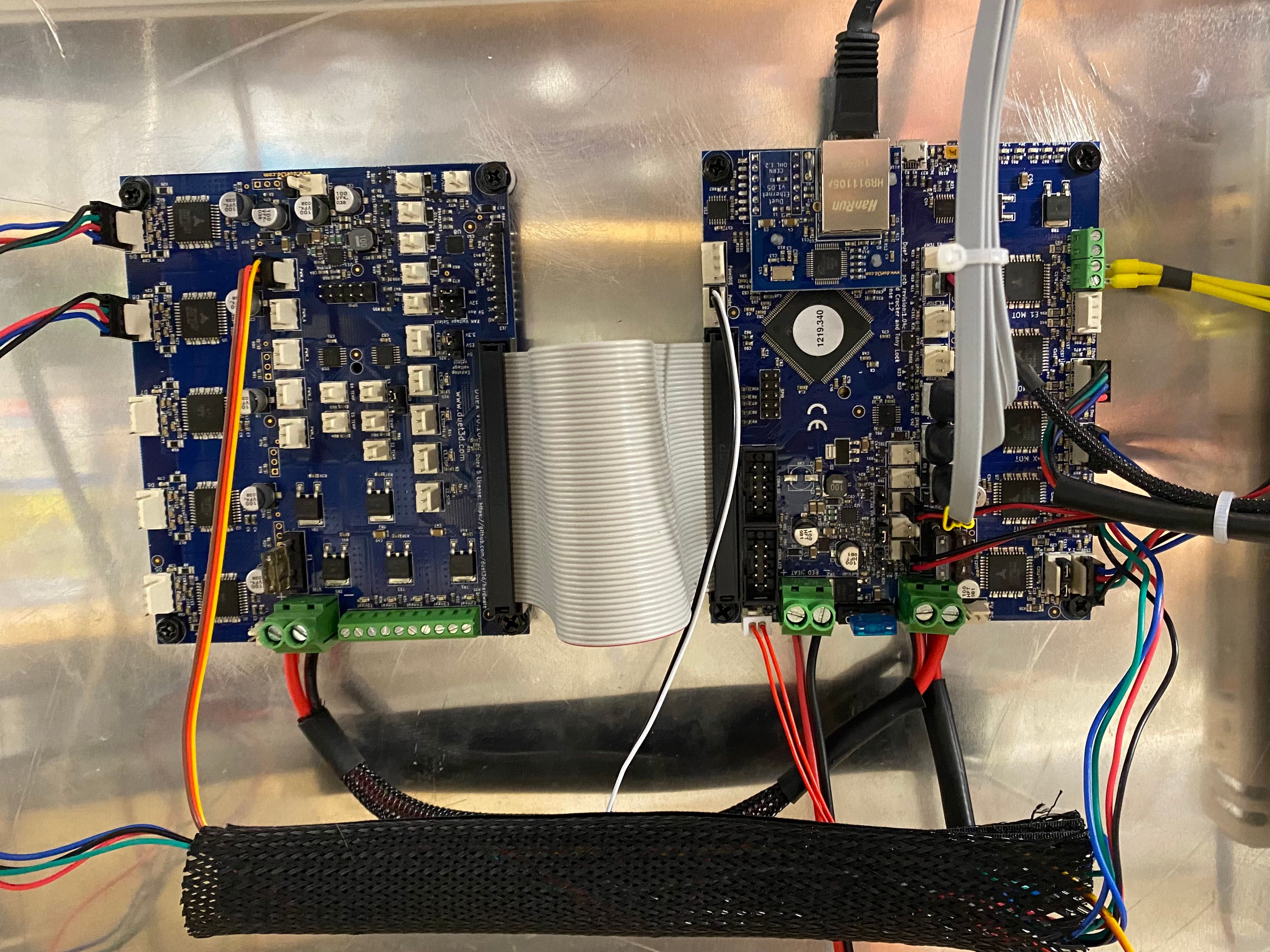
So either something is wrong with the ribbon cable connection or the power connection.
Can you post a picture of them?
Frederick
-
Is this a new or existing Duex?
-
-
@phaedrux
This is a "new" Duex, ordered it 13 months ago and installed it this week. -

Tried with other drives on duex and remapped in config.g but the same LEDs behaves as before. Also swapped polarity on the motors.
It’s not that I completely missed some installation steps?
Because all I’ve done is connected the Duex with ribbon cable and VIN +/-.
I haven’t told the Duet there is a Duex in anyway if that’s necessary? -
-
@fcwilt
Yea the fuse is solid.
So there aren’t a configuration step to let the Duet know I added a Duex?
That was one answer I was hoping for…
-
@eken said in Motors doesn't work on drives from Duex 5:
@fcwilt
Yea the fuse is solid.
So there aren’t a configuration step to let the Duet know I added a Duex?
That was one answer I was hoping for…Did you measure the voltage at the power input to the Duex board?
Frederick
-
@fcwilt
24,2V if I remember correctly, same as at the Duet and PSU.Edit
24,19V -
@eken said in Motors doesn't work on drives from Duex 5:
@fcwilt
24,2V if I remember correctly, same as at the Duet and PSU.Edit
24,19VAll I can suggest at this point is to disconnect everything but power and the ribbon cable then run M122.
Of course turn off power first.
Frederick
-
And there is no need to perform a reset?
Necessary positioning of jumper?
No nothing to get the drive outputs active more than assigning them in config?Noticed that if I disconnect all stepper motors the end6 LED turns off.
If I connect a motor on any of the drive outputs the end6 LED turns on. -
@fcwilt
Ok, tried that as well. -
@eken said in Motors doesn't work on drives from Duex 5:
@fcwilt
Ok, tried that as well.With nothing still connected run M98 P"config.g" and see if any errors are reported.
Frederick
-
@fcwilt
M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Error: Heater 7 not found -
@eken said in Motors doesn't work on drives from Duex 5:
@fcwilt
M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Error: Heater 7 not foundI'm running out of ideas. Please post your complete config.g file using the </> tag.
Thanks.
Frederick
-
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.2.1 on Tue Jan 12 2021 00:28:54 GMT+0100 (centraleuropeisk normaltid) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"ME4080" ; set printer name M669 K1 ; select CoreXY mode ; Drives M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S0 ; physical drive 3 goes backwards M569 P4 S0 ; physical drive 4 goes backwards M569 P5 S1 ; physical drive 7 goes forwards M569 P6 S1 ; physical drive 8 goes forwards M569 P9 S1 ; physical drive 9 goes forwards M584 X0 Y1 Z2:5:6 E3 ; set drive mapping M350 Z16 I0 ; configure microstepping without interpolation M350 X16 Y16 E16 I1 ; configure microstepping with interpolation M92 X100.00 Y100.00 Z400.00 E402.00 ; set steps per mm M566 X900.00 Y900.00 Z90.00 E3000.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z720.00 E12000.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z400.00 E4000.00 ; set accelerations (mm/s^2) M906 X1400 Y1400 Z1400 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X270 Y270 Z260 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S2 ; Define Z to use Probe. Home to Min ; Z-Probe M558 P9 C"^zprobe.in" H10 F120 T6000 X0 Y0 Z1 ; Set Z probe type/mode 9. H=Dive Height. F=Speed the bed moves M557 X10:200 Y10:200 S50 ; define mesh grid G31 X60 Y60 Z3.0 P25 ; Z probe trigger value, offset in relation to nozzle. And trigger height adjustment M950 S13 C"duex.pwm5" ; Which pin BLTouch is connected to ; Heaters M307 H7 A-1 C-1 D-1 ; Disable the 7th Heater to free up PWM channel 5 on the Duex board. M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 B0 R0.724 C166.5 D3.47 S1.00 V24.2 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 100C M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.060000e-8 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss T0 ; select first tool Don't understand what you meen with </> tag?