auto calibration
-
@trublu89 said in auto calibration:
it won't even crash it will just stop before reaching it. And sometimes the margin of error is -9.
What do you mean by "reaching it" - what does "it" refer to?
Frederick
-
right before it tries to trigger it will just stop and error out probe was not triggered during move.
-
@trublu89 said in auto calibration:
right before it tries to trigger it will just stop and error out probe was not triggered during move.
That is usually caused by starting to probe to far from the bed.
Does the probe move smoothly towards the bed?
Frederick
-
I have the ir probe and my lead screws are independent driven by motors.
-
The offsets for the probe look suspect
G31 P500 X0 Y0 Z0.192There is no X Y offset from the nozzle so the firmware doesn't know where the probe actually is. And the trigger height seems very small.
Have you gone through this yet? https://docs.duet3d.com/en/User_manual/Connecting_hardware/Z_probe_testing
;Lead screw position M671 X45:45:485:485Y45:424:424:45 s5This command to define your lead screw positions may not be registering correctly because there is a missing space between the X and Y values and an extra space before the S.
Can you also post your homeall.g and config-override.g?
It would also be nice to see the results of sending M122 and M98 P"config.g" in the gcode console.
@trublu89 said in auto calibration:
it won't even crash it will just stop before reaching it.
Does this happen consistently in the space spot? Or totally randomly?
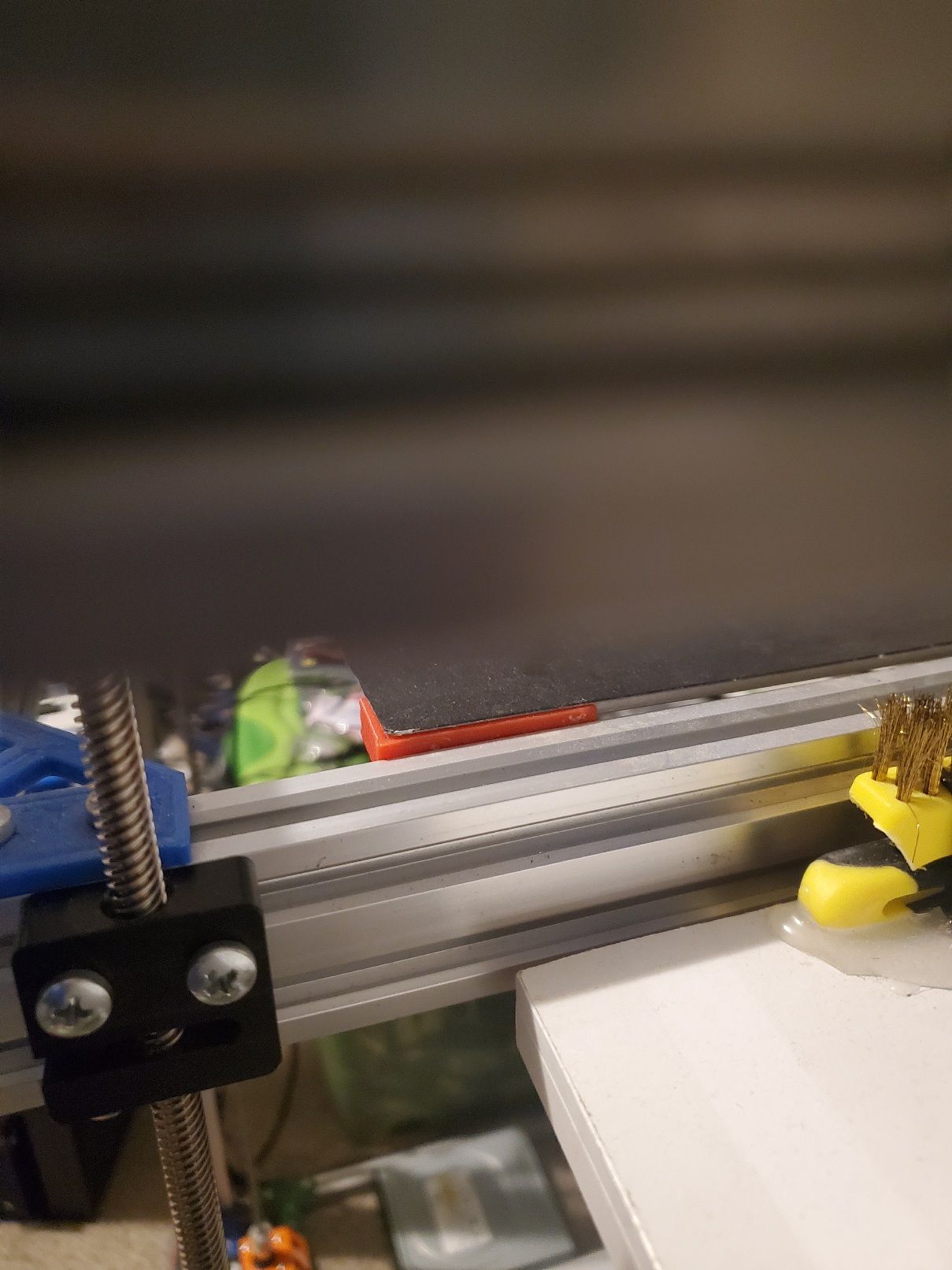
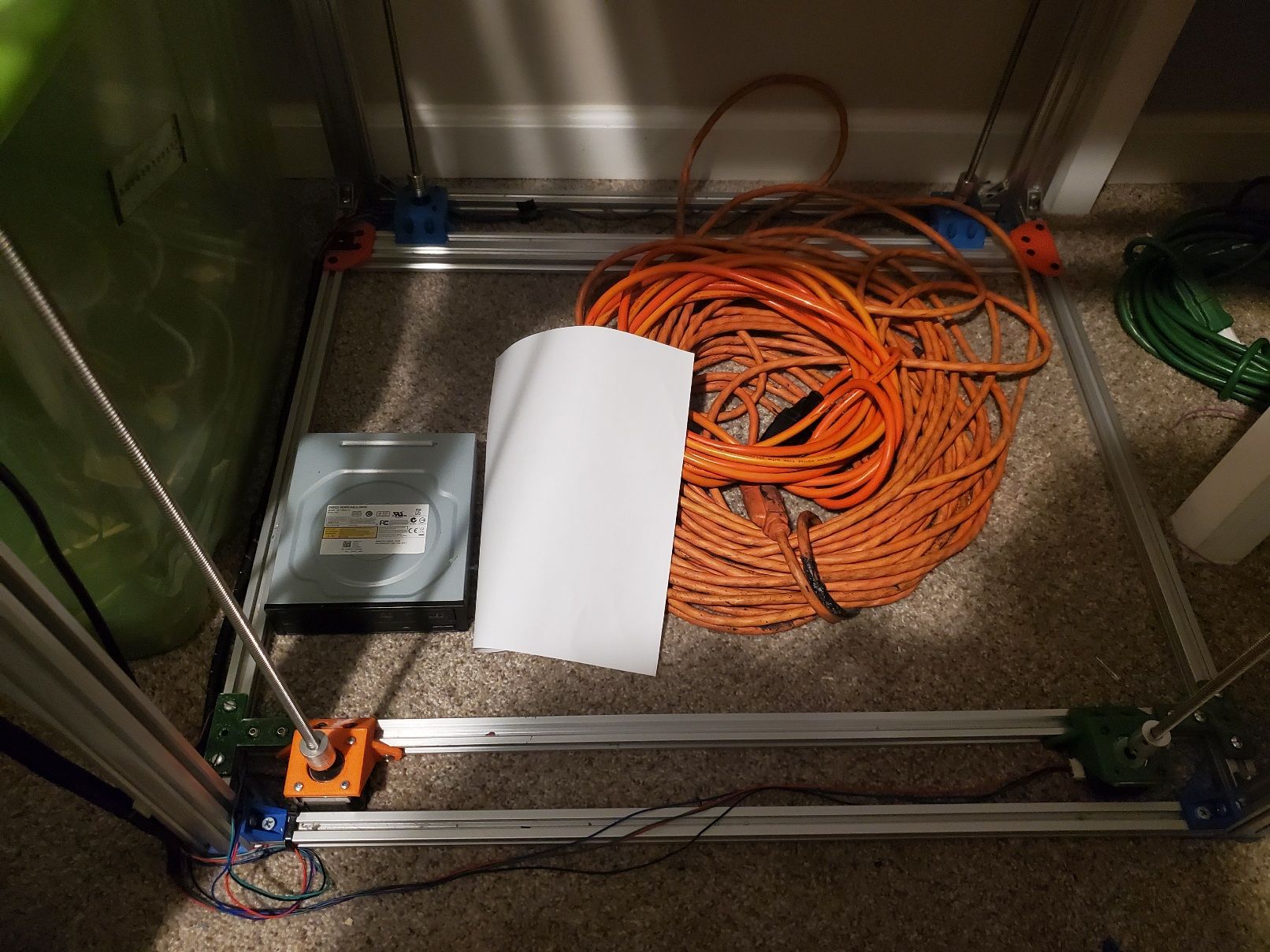
What is your bed surface? The IR probe can be sensitive to reflective or multicolor surfaces. You can try and eliminate this by putting a plane piece of white paper on your bed.
It would also be good to get some close up photos of the IR probe itself incase it is damaged in some way.
-
I didn't realize there was a gap in my m671

That's how I came up with .192 homing to where the paper grabbed the nozzle and g92 z=0 g30 s1 to get the mean results.
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v3.3.10 on Fri Dec 17 2021 18:35:59 GMT-0600 (Central Standard Time) G91 ; relative positioning G1 H2 Z5 F108000 ; lift Z relative to current position G1 H1 X-565 Y-535 F1800 ; move quickly to X or Y endstop and stop there (first pass) G1 H1 X-565 ; home X axis G1 H1 Y-535 ; home Y axis G1 X5 Y5 F108000 ; go back a few mm G1 H1 X-565 F360 ; move slowly to X axis endstop once more (second pass) G1 H1 Y-535 ; then move slowly to Y axis endstop G90 ; absolute positioning G1 X32 Y50 F108000 ; go to first bed probe point and home Z G30 ; home Z by probing the bed; config-override.g file generated in response to M500 at 2022-05-14 23:47 ; This is a system-generated file - do not edit ; Heater model parameters M307 H1 R1.925 K0.303:0.261 D5.51 E1.35 S0.90 B0 V12.2 ; Workplace coordinates G10 L2 P1 X0.00 Y0.00 Z0.00 G10 L2 P2 X0.00 Y0.00 Z0.00 G10 L2 P3 X0.00 Y0.00 Z0.00 G10 L2 P4 X0.00 Y0.00 Z0.00 G10 L2 P5 X0.00 Y0.00 Z0.00 G10 L2 P6 X0.00 Y0.00 Z0.00 G10 L2 P7 X0.00 Y0.00 Z0.00 G10 L2 P8 X0.00 Y0.00 Z0.00 G10 L2 P9 X0.00 Y0.00 Z0.00What is the config overide g? I never really looked in there.
M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.4.0 (2022-03-15 18:58:31) running on Duet WiFi 1.02 or later + DueX5 Board ID: 08DGM-956GU-DJMSN-6JKF2-3S86L-TBRVG Used output buffers: 3 of 24 (16 max) === RTOS === Static ram: 23868 Dynamic ram: 74744 of which 0 recycled Never used RAM 13468, free system stack 184 words Tasks: NETWORK(ready,12.4%,247) HEAT(notifyWait,0.0%,332) Move(notifyWait,0.0%,364) DUEX(notifyWait,0.0%,24) MAIN(running,87.0%,440) IDLE(ready,0.5%,30), total 100.0% Owned mutexes: WiFi(NETWORK) === Platform === Last reset 00:02:37 ago, cause: power up Last software reset at 2022-05-14 19:46, reason: User, GCodes spinning, available RAM 13264, slot 0 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 Step timer max interval 0 MCU temperature: min 29.6, current 36.9, max 37.2 Supply voltage: min 12.3, current 12.4, max 12.5, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min n/a Driver 1: standstill, SG min n/a Driver 2: standstill, SG min n/a Driver 3: standstill, SG min n/a Driver 4: standstill, SG min n/a Driver 5: standstill, SG min n/a Driver 6: standstill, SG min n/a Driver 7: standstill, SG min n/a Driver 8: standstill, SG min n/a Driver 9: standstill, SG min n/a Driver 10: Driver 11: Date/time: 2022-05-15 16:48:09 Cache data hit count 4294967295 Slowest loop: 135.24ms; fastest: 0.19ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 1.2ms, write time 60.6ms, max retries 0 === Move === DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === Filament sensors === Extruder 0 sensor: ok === DueX === Read count 1, 0.38 reads/min === Network === Slowest loop: 111.91ms; fastest: 0.00ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 1 of 8 - WiFi - Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 WiFi firmware version 1.26 WiFi MAC address 5c:cf:7f:76:72:b4 WiFi Vcc 3.39, reset reason Turned on by main processor WiFi flash size 4194304, free heap 24952 WiFi IP address 10.0.0.18 WiFi signal strength -66dBm, mode 802.11n, reconnections 0, sleep mode modem Clock register 00002002 Socket states: 4 0 0 0 0 0 0 0M98 P"config.g" HTTP is enabled on port 80 FTP is disabled TELNET is disabledIt stops before reaching it in the rear right corner I adjusted the screw manually and eventually it will still do it.
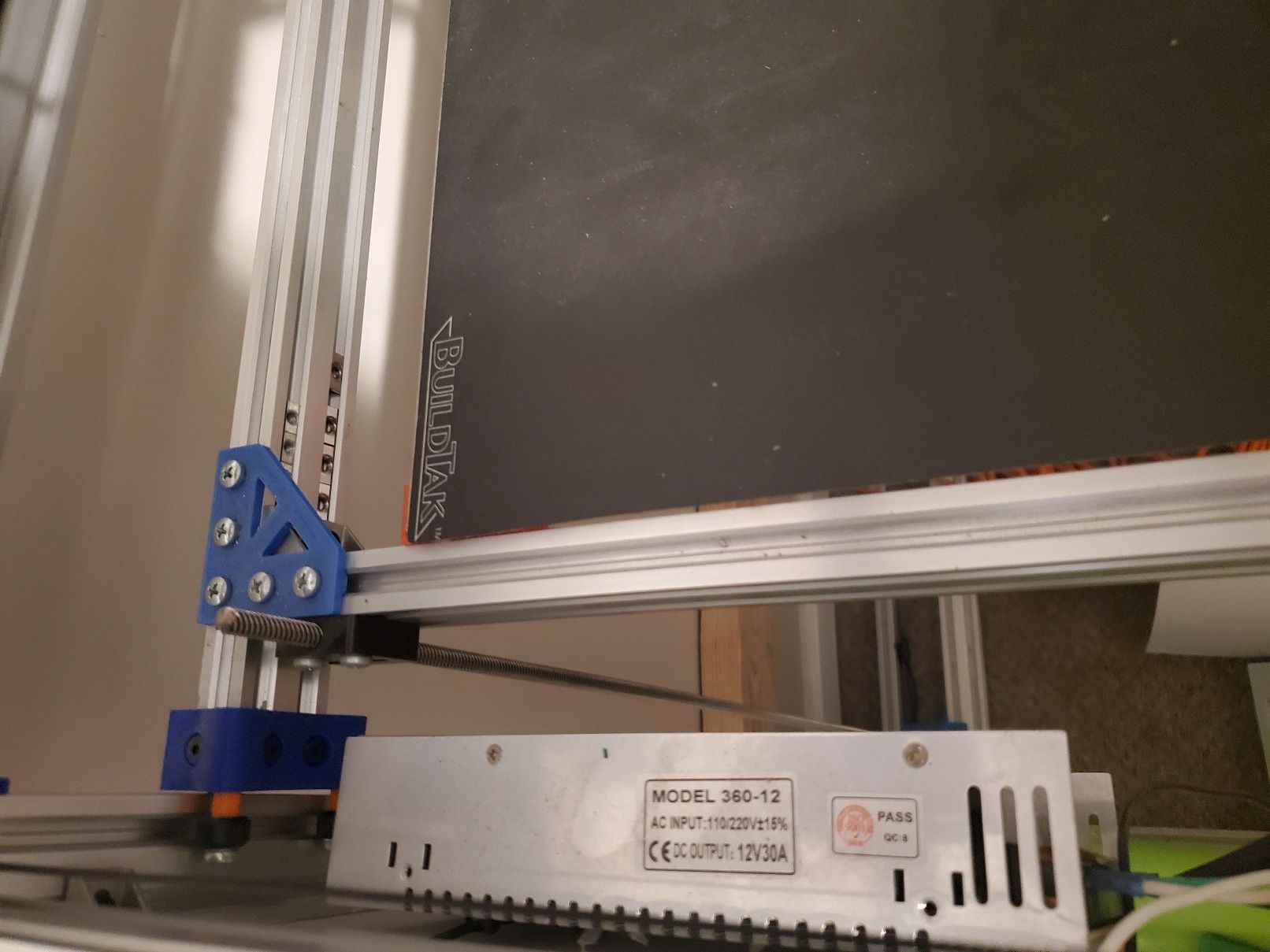
The build surface I have is buildtak.
-
@trublu89 said in auto calibration:
It stops before reaching it in the rear right corner I adjusted the screw manually and eventually it will still do it.
Is there anything unique about that corner? Can you try putting the plain white paper there?
-
@phaedrux nope is there a way to just move one z motor instead of all?
-
@trublu89 said in auto calibration:
@phaedrux nope is there a way to just move one z motor instead of all?
Have you tried Auto Bed Leveling?
Docs where bed leveling is discussed
How do the Z steppers connect to the bed? Do the connections have any give? Are the kinematic connections?
Frederick
-
@fcwilt this is g29 initially and then g29 with s1 at startup code right?
-
G29 is related to Mesh Bed Compensation which is a feature used during printing to try and adjust for an uneven bed.
G32 is related to Auto Bed Leveling which is a feature used before printing to level the bed. Since you have multiple Z steppers you may be able to use Auto Bed Leveling but it depended on how much "flex" you have in the connections from the Z lead screws to the bed. The firmware probes the bed with your Z probe and attempts to adjust the Z steppers individually to level the bed.
Here is a link to a quick-and-dirty video showing the Auto Bed Leveling feature leveling the bed on my printer. I designed the printer to support bed leveling and I use kinematic mounts to connect the Z belts to the bed. The mounts allow a lot of "flex" so the Z steppers are free to adjust the bed without any binding.
Frederick
Printers: a small Utilmaker style, a small CoreXY and a E3D MS/TC setup. Various hotends. Using Duet 3 hardware running 3.4.6
-
@fcwilt I have the flexible z couplers.
-
@fcwilt also what would cause temperature excursion. I have paid tuned several times with and without the fan on.
-
@trublu89 said in auto calibration:
@fcwilt also what would cause temperature excursion. I have paid tuned several times with and without the fan on.
What error exactly are you getting and when are you getting it? Did you save the results of the PID tune and have it loaded again at startup? This is usualy done by sending M500 after the tuning to save it to config-override.g and then adding M501 to the end of config.g to load that file at startup.
-
@phaedrux I didn't add the 501 I just entered m500.
It said temperature excursion went from 230 to 250. I think the fan might have been too high I tried to make it to where it cuts on but low not on high but it still is 60 or 80 percent.
-
Ideally you should have a silicone nozzle sock installed to insulate the hotend from the fan. The fan duct itself should be aimed away from the nozzle. And for tuning you can use M303 T0 S245 to tune the hotend as a tool, including using the fan during tuning to help compensate.
-
@phaedrux I had this volcano way before the silicone socks ever came about.
I have some of the hose printrbot used on their ubis got end but the heat makes it tear. Maybe it was meant for a lower heat.