Symetric Print on Y axis
-
Check out this section of the corexy setup guide on testing motor movement.
There are a few things to keep in mind.
-X should move left, +X to the right.
-Y to the front, +Y to the back
The endstop position needs to be defined in M574
The homing move direction is set in the homing files.With those things in mind, the motor tests will help you figure out what needs to change.
-
I've work on this today. After fews hours and many stettings try, i always have this issue :
The Y axis is not in the right derection (Y+ & Y- are swapped).
But if I switch the Y direction only, the X axis is reverse as well due to the Core xy kinematic. Do you have an idee to fix it ?
Thanks you so much,
Rodrigue")
-
Did you do the motor tests?
-
@rodrigue-richalland remap X and Y, i.e. M584 X1 Y0 then resetup
-
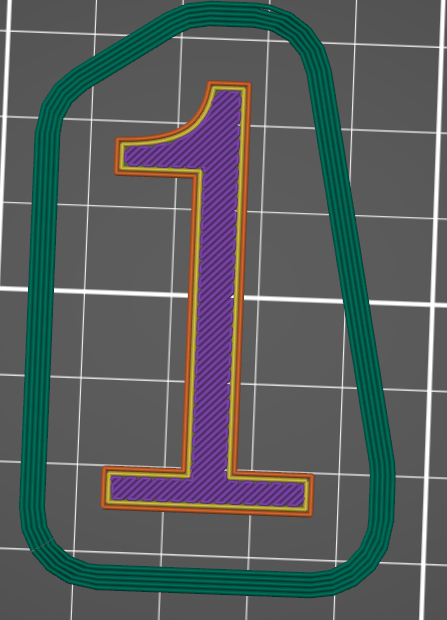
My -X move right & +X move left
My -Y move front & +Y move back
My -Z move top (to nozzle contact) & +Z move downSo , the 3d prints pieces are always symetric as you can see on the attached pictures.
 .
. 
-
So I dont know how to place the x axis in right direction without z axis direction reverse. Thanks for your precious help
-
@rodrigue-richalland said in Symetric Print on Y axis:
So I dont know how to place the x axis in right direction without z axis direction reverse. Thanks for your precious help
Have you worked through the link that @Phaedrux posted? If so, did you also read this note - quote.........
"Important: make sure that you have chosen a right-hand axis system. That is, looking down on the printer the +Y direction should be 90 degrees anticlockwise from the +X direction. If instead it is 90 degrees clockwise, you have a left-hand axis system, which will give you mirror-image prints."
-
@deckingman
Yes i've work hard on the link that @Phaedrux posted. I 'm unable to place the frame in the right position. I've try to modify differents settings :*G92 position in home x, y
- low end or high end Ends stop
- sense of rotation or X and Y motor
How it's possible to set "right hand" or "left hand " axis system ?
-
When standing in front of your printer, where are the endstops positioned?
Please post your config.g and your homing files.
-
@phaedrux
all work. it was the motor mapping. Thanks you so much for your help