issue with 1HCL and Quadrature Shaft Encoder
-
-
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux moved this topic from Tuning and tweaking
-
@tom33 Are you sure, the encoder has 1000 cpt? Maybe it's a 1024 cpt version?
How much smaller are you talking about? -
@tom33 please try the 3.5.0-rc.1+ files at https://www.dropbox.com/scl/fo/tjznycpk7bv7sj71p0ssl/h?rlkey=096p4nvgmigyrb20jj8olg3wu&dl=0.
What PID parameters are you currently using for the 1HCL?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 After testing the new revision of the firmware I still have the same probem !
-
M569.1 P10.0 T2 C1000 H50 P30 I1000 D0.050 A150000 V400 E4:8 M569.1 P15.0 T2 C1000 H50 P30 I1000 D0.050 A150000 V400 E4:8 M569.1 P20.0 T2 C1000 H50 P30 I1000 D0.050 A150000 V400 E4:8 M569.1 P25.0 T2 C1000 H50 P30 I1000 D0.050 A150000 V400 E4:8 -
@dc42 the problem come from the firmware or the motor ?
Megnetic encoder like this one : https://www.omc-stepperonline.com/fr/nema-17-moteur-pas-a-pas-a-boucle-fermee-65ncm-92oz-in-avec-encodeur-magnetique-1000ppr-4002cpr-17hs24-2104-me1k
Can resolve the problem ?
Thanks !
-
-
@tom33 please use D2 instead of D0 in your M569 commands to set open loop mode, e.g. M569 P10.0 D2 instead of M569 P10.0 D0.
We recommend that you home the axis in open loop mode; then move away from the endstop a little so that the motor can move freely; then switch to closed loop mode, set maximum current, execute the M569.6 tuning move, then set normal current.
When you run the encoder tuning move M569.6 P10 V1 (and similarly for the other motors), what does it report?
How close is the EXP1HCL board to the motor? I am wondering whether the encoder wires could be picking up noise.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I have tried to home the axis with d0 d2 and d3 with the same results
The encoder have 450 - 650 mm maximum cable length
-
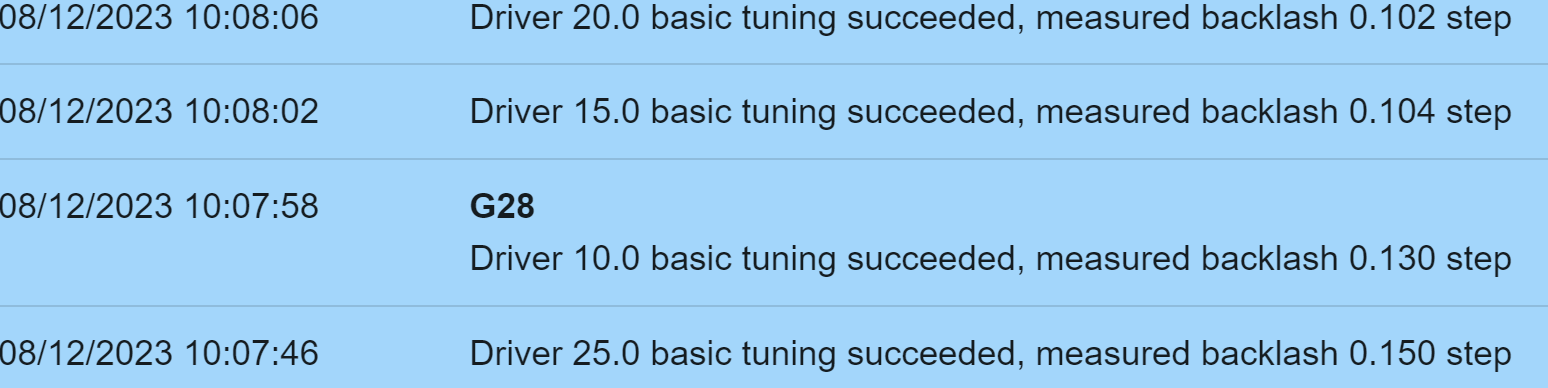
@tom33 those tuning results look good. Please upgrade all firmware to 3.5.0-rc.2 and try PID tuning again. Bear in mind that PID tuning for closed loop motors in RRF 3.5.x is completely different from 3.4.x so you will need to install the 3.5.x version of the closed loop tuning plugin if you haven't already, establish new PID parameters, and copy them into the M569.1 commands in config.g. See the RRF 3.5 tab at https://docs.duet3d.com/User_manual/Tuning/Duet_3_1HCL_tuning#manual-tuning for instructions.
Then report whether you still have these original issues:
@tom33 said in issue with 1HCL and Quadrature Shaft Encoder:
1 - When I turn the motor from closed loop to open loop I don't obtain the same measurement on parts (smaller in closed loop)
2 - When I tried to print circle they are good in open loop mode but not in closed loop mode issue in changing directionDuet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I have tried the 3.5.0 rc2 but the problem still persist
as you can see in the picture :

When I turn the machine in open loop mode I don't have problem when I print circle