Closed Loop Control - Parallel SCARA
-
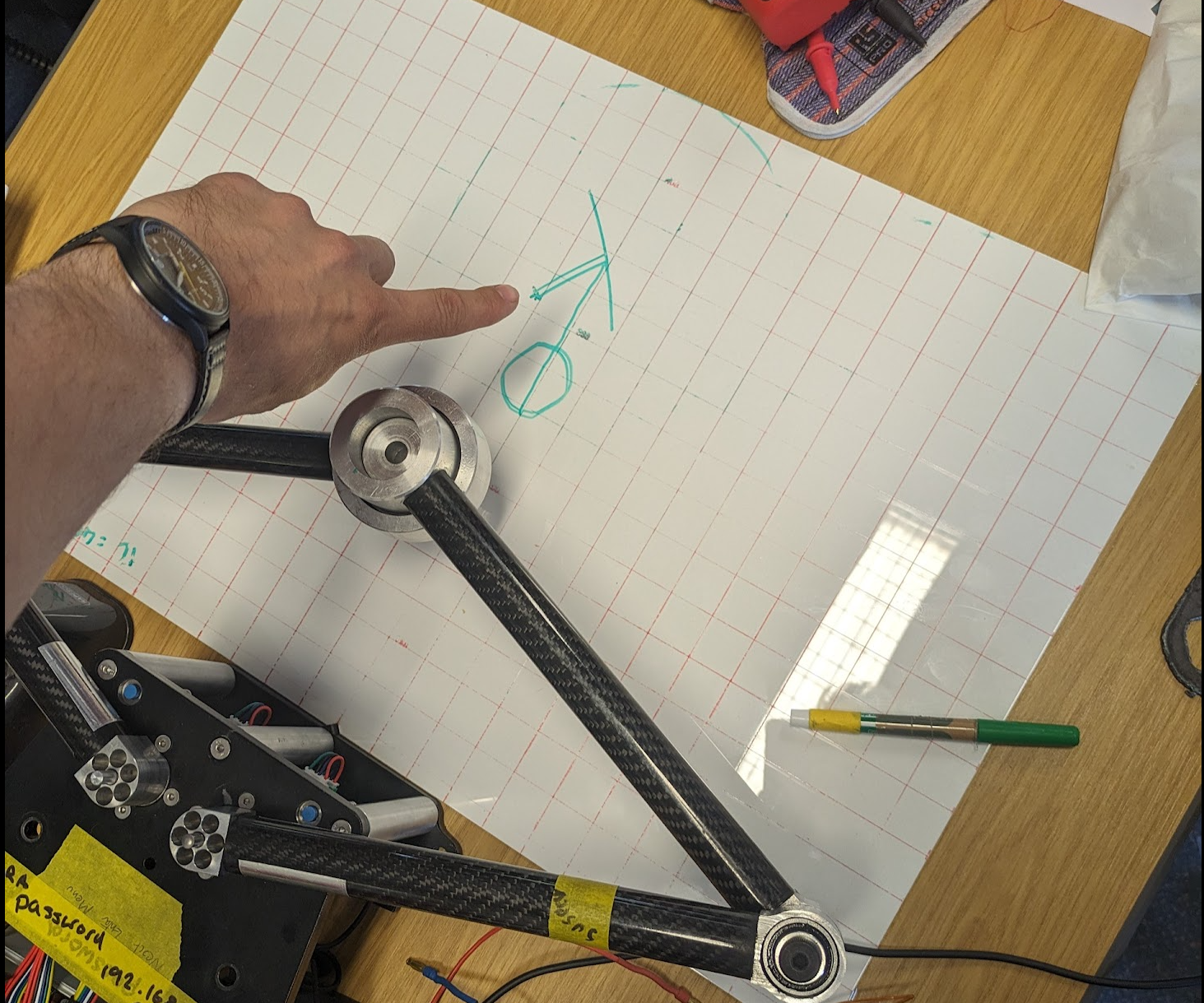
Hello, I have recently been building a CNC Parallel SCARA machine. It is functional, however I have backlash in one of the harmonic gearboxes. This can be seen in the photo with my hand pointing to two parallel arc lines, these are caused by the right joint, and they should overlap but due to backlash they don't.
I would like to add encoders to the output of my gearboxes so that the system can run in a closed loop mode. Is this something anyone has any experience with? I have been unable to find any information regarding encoders other than those mounted directly to stepper motors.
I currently have the following setup:
SKRv1.4 -> MKS Servo 42c Closed Loop Stepper Driver -> Nema 17 -> Harmonic Gearbox. I would like to encode the output of the harmonic gearbox, ideally by using this as I already have two: https://www.mouser.co.uk/ProductDetail/Bourns/EMS22A50-B28-LS6?qs=%2FxQVPCMPNzhvTDKFYgIzpQ%3D%3DI had been considering trying to run the MKS Servo 42C by placing the magnet on the output shaft, however I have been unable to find any people who have done this successfully.
Many thanks!
-
@NortonAntivirus The Duet 3 expansion 1HCL board (for closed loop control) allows for a linear encoder on the output, and then a magnetic encoder on the motor shaft to close the loop. See https://docs.duet3d.com/Duet3D_hardware/Duet_3_family/Duet_3_Expansion_1HCL#compatible-encoders. I haven't checked if the encoder you have would be compatible, or if a rotary encoder can be used instead of a linear encoder.
There isn't really any other way to provide position feedback to the motion system. From this post https://forum.duet3d.com/post/318919, I assume you are still using the NEMA 17 harmonic drive? Maybe these inherently have too much backlash.
Ian
-
(I've moved the above post from the previous thread)
Ian
-
@NortonAntivirus I highly doubt that the SKR v1.4 is able to read two encoder signals reliably. It takes a certain "hardware encoder" MCU (eg. STM32 gen4) to do it smoothly without interrupt-flooding the FW-main loop.
OTOH, IF a second linear encoder works on a CoreXY, I don't see a reason why it shouldn't work on a SCARA: the relation between motor steps and gearbox output IS linear. (but they are angles...)You mentioned in the other thread, only one gearbox has such high backlash. For me it sounds like a warranty case?
I'd rather look for a replacement than going the wacky backlash compensation route. -
@o_lampe said in Closed Loop Control - Parallel SCARA:
OTOH, IF a second linear encoder works on a CoreXY
I don’t see where this is mentioned? RRF can’t take the input from an encoder and modify the position on the mainboard. The 1HCL can, and can take two encoder inputs.
Ian
-
@NortonAntivirus my opinion is that it's not the harmonic drive causing the problem, because harmonic drives don't have backlash by design (the flexible spline and the circular spline are connected with the teeth having no play). In you example if the left line movement is from right above to left down, and then the short shaky lines, then the right to right above, that's when the stepper change direction.
This shaking and offset of line can come from one of the hinges having too much play, so the balls inside the ball bearing is changing from running and touching one side of the bearing to touching the other side, and this play causes the offset. Can you test whether one of the hinges have play? Test the hinges horizontally and by twisting.
I mean this, being a ball bearing:
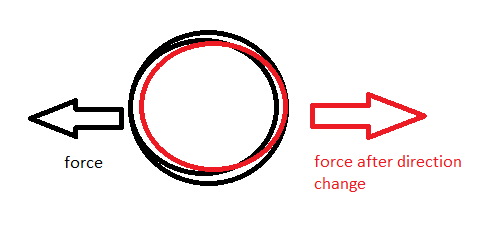
The play can come from the axis inside the hinge as well or flexing of the arms. Arms probably not, they have a high e-module, but the inner axis of the hinge seems to be a screw, this could have play.
When arms are low angles between proximal and distal arms as in your example (= near the steppers), then low play is especially important for precision of the movement. And the steppers need more force to move than if the endpoint if farther away, i. e. there could be lost steps also, especially when the acceleration is fast.
-
The backlash could be play between stepper axis and wave generator of the harmonic drive, but the backlash is with the harmonic drive ratio, i.e. if it's for example a 1:50 gear ratio, the play would result in very low backlash (1:50 th of the stepper-wavegenerator-play), so I suspect the other hinges.
-
When the hinge play is the problem, you could design a solution with eg springs to press the ball bearing to one side always, so the inner ring stays there.
-
@JoergS5 @o_lampe
Thank you greatly for your advice! I have since replaced what I thought was a faulty harmonic gearbox, the backlash in that joint is now greatly reduced. For a university dissertation I had measured the stall torque and repeatability of the harmonic gearboxes, i found stall torque to be around 4.2Nm and precision to be around 0.28 arcmin. A MATLAB simulation model of my parallel SCARA revealed I only needed around 1.1Nm of torque to operate with the speeds and accelerations needed for thin steal.I am still having some strange behaviours occurring with the machine, circles are still not fully circular, and occasionally joint positions are not achieved in a smooth manner. I am wondering if it's a calibration issue, however I shall now investigate the behaviour of bearings incase they're causing issues. I had previously tried using some sprung lanyards to apply tension on bearings and joints to ensure backlash and engagement is consistent. I will try and post some more pictures of the machines behaviours this evening.
Many thanks!