1HCL compatibility question
-
@ironhydroxide
Hi Iron,Interesting offer, but I simply don't have the bandwidth to take on such a project or attempt to support it. With the qty you're looking at, Duet and or possibly a sub-contractor would be your best bet. That said, sounds like your design criteria would be fairly easy to meet, but one off propriety in nature. You need to get a design engineering quote, maybe the folks at Duet could point you in the right direction.
That said I'm just throwing my design out there to share w the community. I didn't put out the full schematic, heres the supply side of things, 24V 5V 3v3. Fyi the pic of the pcb i posted above was a first pass I did in a couple of hrs. Im sure its going to change after some more DRC checks. Ill prolly order the board Monday. Its simply to illustrate the Duet control accessory scheme is flexible enough to meet what it is you're proposing, even with some of your physical design constraints.
I am editing this post by removing the V supply schematic. The schematic was pulled from a different design and not fully reviewed for use in this case. Upon review the circuit needs to be reworked and not acceptable as initially posted.
-
@wayneosdias Completely understand on not having the desire to take a custom project on.
I'm glad there are people like you who are willing to help out, and also give their designs out for the community.I'll look more into the Duet solution and hope that something can come of that. At the moment i'm in the proof of concept phase. but it's looking very hopeful, Duet is a lot more flexible than I imagined before looking into it in earnest.
-
Well it's really a testament to David, Duet and the Moderators. I wouldn't even know where to start without them. Mechatronics isn't my thing even though I rely on 4 one-off purpose-built machines for my business. I can just scheme general design concepts and leverage the Duet system to meet the control needs.
-
@ironhydroxide @wayneosdias this sort of board has been on the hardware roadmap for me for a while.
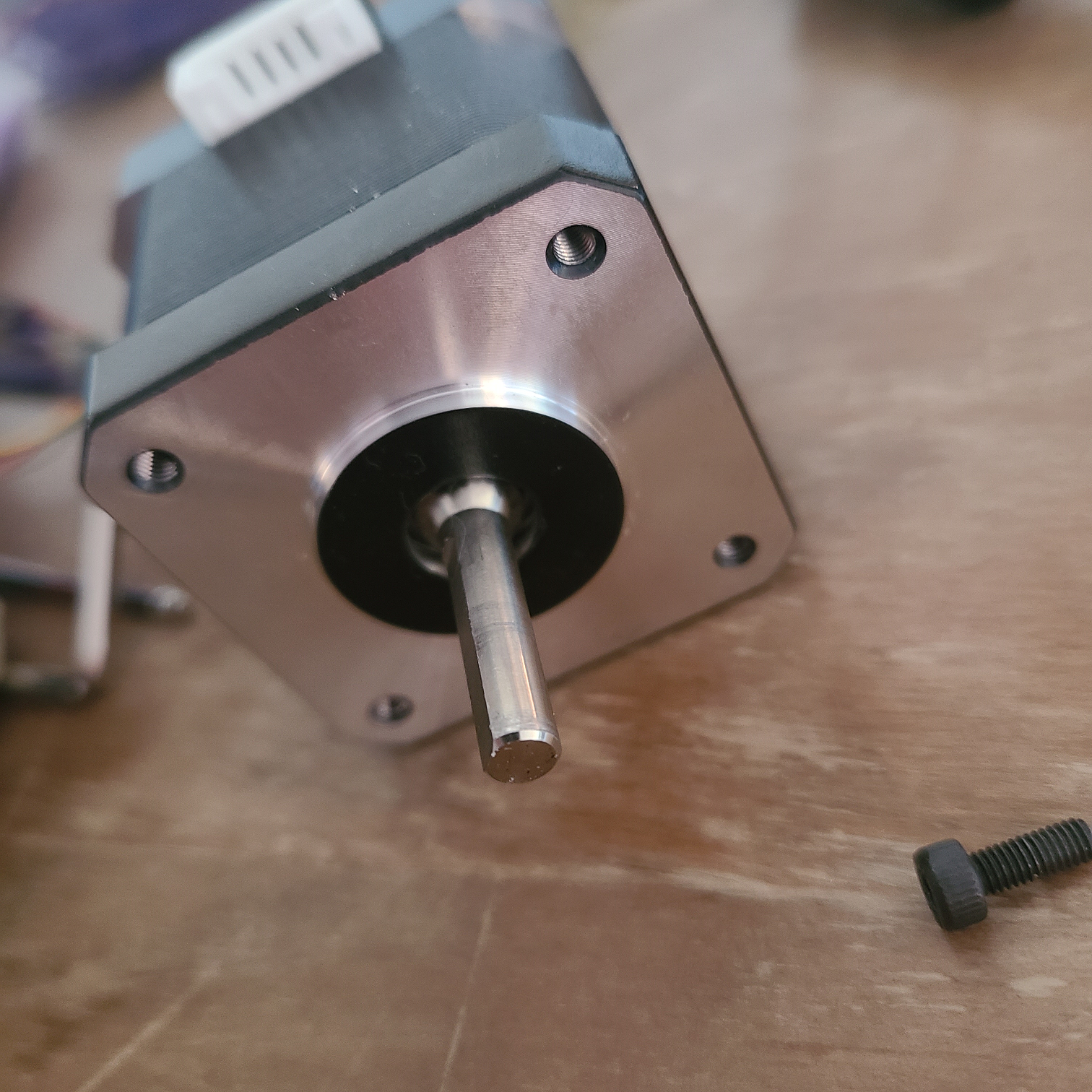
What clearance do you have at the back of your motors @ironhydroxide ?
-
@T3P3Tony With the current motor/mount I have ~1.5mm clearance from the back of the motor to the nearest obstruction, With a modified mount I can get that to ~5mm. I'm 99% certain that is too close, especially when the magnet for the current board is 4mm thick. (shaft not recessed).
I am looking at options for shorter motors, but I'm already at a 19mm motor, so options are scarce.With some redesign of parts (and added machining I'm hoping to avoid) I can probably get 7mm max clearance with the current motor. Again, not very much room.
Edit. Found a motor that's only 12mm long that "should" work for this (of course have to test). This would give me 9-12mm clearance at the back of the motor (9mm with my current motor mount, up to 12mm with modified motor mount.)
-
@ironhydroxide you may be able to get versions of the motor with a recessed shaft to (say) 3.5mm which might just allow you to fit a magnetic encoder board with a different header from our standard on into the gap. Then mount a board on one of the motor sides rather than on the back for the closed loop control. Let me know once you have explored the options for creating clearance on the back.
-
@T3P3Tony said in 1HCL compatibility question:
Then mount a board on one of the motor sides rather than on the back for the closed loop control
Good call on the recessed shaft, I'll look into them.
I also found some diametrically opposed magnets on McMaster that are only 1.6mm tall (up to 12.7mm diameter) so that could help with clearance as well.
Sadly the back of the motor is the most feasible location without a complete redesign/machining of the rotation system.
the max swing radius is 30mm, giving me at most 60mm(really only ~50 usable). as the motors are ~42mm that leaves ~8mm for mounting, electronics, wiring, etc.I think I'll pick up one of those 12mm long motors, and a larger diameter but shorter magnet, and do a static test, see what clearance the encoder chip can deal with, with larger diameter but thinner magnets. That will at least get me an idea of remaining space (and if that motor can drive the feed system)
-
@wayneosdias I took a look at your schematic. The TMC5160 needs external mosfets to drive the stepper motors. For small motors the TMC2240 would be better, if you don't mind the max VIN voltage being about 36V.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@ironhydroxide check the max temperature the motor will get to and look at the specs of the magnets. We use high temperature magnets for mounting on the motor shaft (which is not needed in many cases but could help if running hot). A slightly wider diameter magnet will work slightly better for the same flux density, up to about 10mm see this figure from the AMS application note:
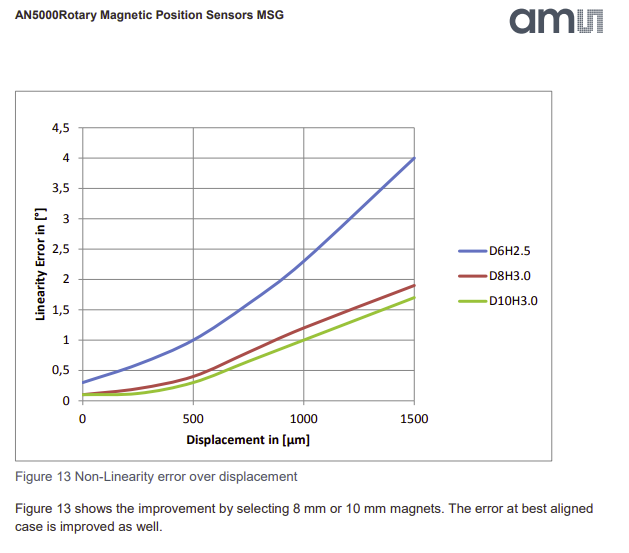
We chose a 6mm magnet because that fits even in recessed shaft NEMA 17 motors
-
@T3P3Tony Good call, I didn't think about heat. The current motors never get above 40c, a thinner might get hotter due to the same energy in a smaller package (or less efficient), will have to test.
Magnets are all rated to 54c and 80c depending on diameter so I think/hope I'll be fine there.for the widest use case, the 6mm makes perfect sense.
I'm just on the far end of the curve, so I get(have) to look at all options, and if a 10mm magnet is more accurate that can't hurt if it also gives more space to work with. -
@ironhydroxide its more that a 10mm magnet that is thinner and has a lower flux density may match the thicker 6mm magnet in performance.
-
@T3P3Tony OH, thanks for explaining that. Magnets are magic to me.
-
@dc42 yes thanks re 2240.
Re motor/magnets. I have purchased every flavor of the MKS 42Servo B C D and some diff/similar control boards from btt. They all kinda initially work but would become unstable at some point, overshoot/correct and or lose their 'mind' requiring an in situ recalibration. These were just the control boards mounted to the back of old nema17 motors with magnets glued to the shaft.I then tried a motor/control board combo of MKS servo D and it has worked very well in terms of long term stability. When I installed the motor, I noticed the drive side of the shaft. It appears to be an 8mm shaft turned down to 5mm. Taking the control board off looking at the non drive of the shaft and it appears to be milled with the magnet recessed into it. Or maybe the magnet is banded to the shaft? What ever may be the case, the fb/encoding of this controller/motor combo has been rocks solid.
Just food for thought

-
@wayneosdias yes a pocket on the back of the motor shaft is ideal.
-
@T3P3Tony @dc42
I was able to get one of those 12mm off the shelf motors in hand, and played around with it and the duet Magnetic encoder board.With correct magnet spacing and the encoder thickness I have ~6mm clearance from board face (on motor side) with minimal modifications to my system.
The mag encoder board is a 1.5mm, so that means max component height of 4.5mm on the "back" side of the board, (and on the "front" side 2mm) if the same is used.Do you think it'd be feasible to get all the components on the board with that restriction? In a design that Duet would be able to market/sell? Or are my systems requirements a bit too niche?
-
@ironhydroxide Q wasn't directed at me, but i'll throw out a quick fix that could potentially be a future Duet accessory. Ditch the Duet ribbon header/cable and replace it with a FPC BOB. The big ribbon/header connector Duet uses doesn't really buy you much as spi is limited in signal distance any away. Put a FPM connectyor on the Mag board and afix the driver board 90deg to the motor body. That is if there is room on one of the sides of the motor body.
-
@ironhydroxide lets continue this discussion on email, please drop me a line tony(at)duet3d com
-
@T3P3Tony Email sent, thanks for your help.