Homeall.g fails when homing all axes
-
-
You can install two Y endstop sensors but you are not going to derive any benefit from doing so, when you only have one Y stepper motor.
Frederick
-
@developeralgo222 for Y axis and white wires use !iox.in
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Just leaving 2 endstops at the Min of each rail . The 2 endstops are connected as a 1 single Endstop at the Min only. Will this work for Y-axis?
Yes - because, as you rightly say, the two endstops are wired to act as a single switch.
-
Ok i have made the modifications on Endstops
X-Axis ---- Endstop works fine now and triggers correctly
Y-Axis ---- Endstop works fine now and triggers correctly
W, A, B, C, D, k ---- Endstop works fine now and triggers correctly
Test:
Working on Z, U , V Axes:
Not sure how this need to be configured ( This are shared Z-CAM based axis ) for 6 Nozzles
Z , U , V ( Z-Axis = (Z1, Z2), U-Axis = (Z3, Z4), V-Axis= (Z5, Z6) ) only Z2 , Z4, Z6 triggers Z , U , V respectively but not Z1, Z3, Z5
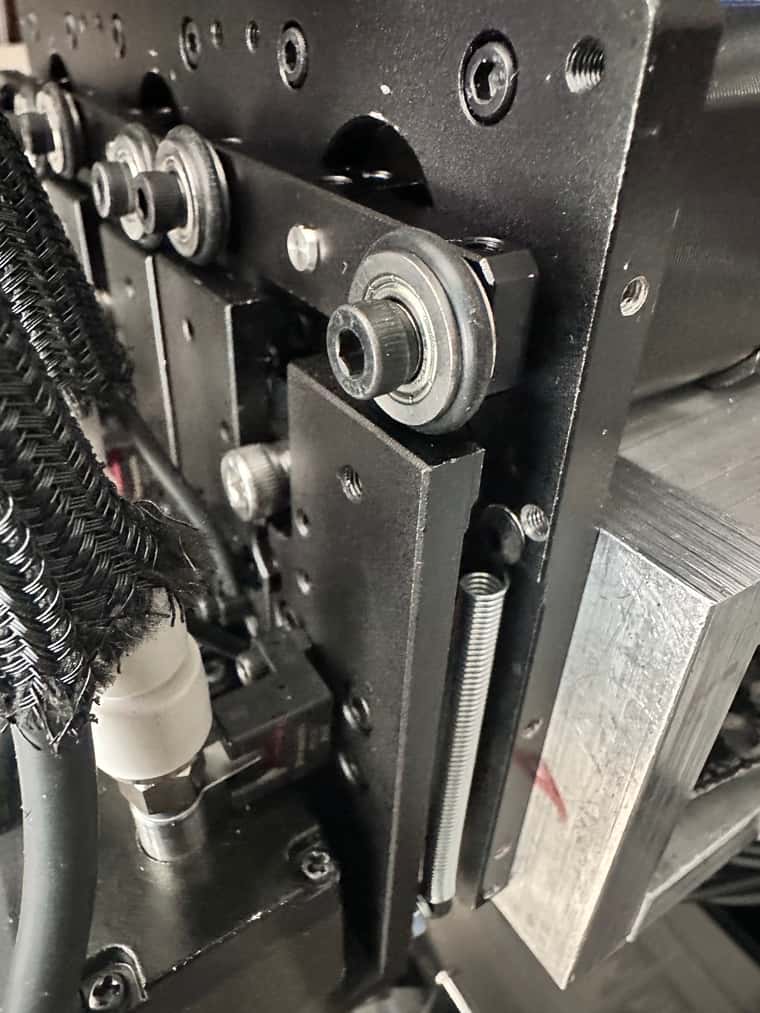
; Endstops ; For X and Y Axis M574 X1 S1 P"0.io1.in" ; configure active high endstop switch for low end on X via pin io1.in M574 Y1 S1 P"0.io2.in" ; configure active high endstop switch for low end on Y via pin io2.in ; For Z-Axis (Shared Z,U,V) - Up/down) -- CAM Driven Dual Nozzles ( 1 Motor rotates up/down to drive 2 Nozzles ) M574 Z1 S1 P"1.io0.in" ; configure active high endstop switch for low end on Z via pin 1.io0.in M574 Z2 S1 P"1.io1.in" ; configure active high endstop switch for High end on Z via pin 1.io1.in M574 U1 S1 P"1.io2.in" ; configure active high endstop switch for low end on U via pin 1.io2.in M574 U2 S1 P"1.io3.in" ; configure active high endstop switch for High end on U via pin 1.io3.in M574 V1 S1 P"1.io4.in" ; configure active high endstop switch for low end on V via pin 1.io4.in M574 V2 S1 P"1.io5.in" ; configure active high endstop switch for High end on V via pin 1.io5.in ; For Rotational Axes only (W, A, B, C, D, 'k(k)) M574 W1 S1 P"2.io3.in" ; configure active high endstop switch for low end on W via pin 2.io3.in M574 A1 S1 P"2.io4.in" ; configure active high endstop switch for low end on A via pin 2.io4.in M574 B1 S1 P"2.io5.in" ; configure active high endstop switch for low end on B via pin 2.io5.in M574 C1 S1 P"3.io3.in" ; configure active high endstop switch for low end on C via pin 3.io3.in M574 D1 S1 P"3.io4.in" ; configure active high endstop switch for low end on D via pin 3.io4.in M574 'k1 S1 P"3.io5.in" ; configure active high endstop switch for low end on 'k via pin 3.io5.inHere is a photo of the 6-Nozzles with a little grainy photo to show some of the 6 endstops under each Z-based axis ( Z, U, V )


-
@developeralgo222
i went back to try and individually home all Axes that have their end stops corrected i.eX-Axis ---- End stop works fine now and triggers correctly
Y-Axis ---- End stop works fine now and triggers correctly
W, A, B, C, D, k ---- End stop works fine now and triggers correctlyHoming fails on all of them. e.g. homing X-axis, this is what i have in the file ( very simple, nothing complicated ). It completes the movements in homing X-axis fine with no issues but DWC reports that Homing X failed e.g
; Home X-Axis G91 ; relative positioning G1 H2 X0 ; set axes position explicitly to Zero i.e move X and Y-axis Minimum Homing endstop and stop there G1 H2 X40 F10000 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X-40 F10000 ; go back a few mm G1 H2 X0 ; move X and Y-axis Minimum Homing endstop and stop there (first pass) G90 ; absolute positioning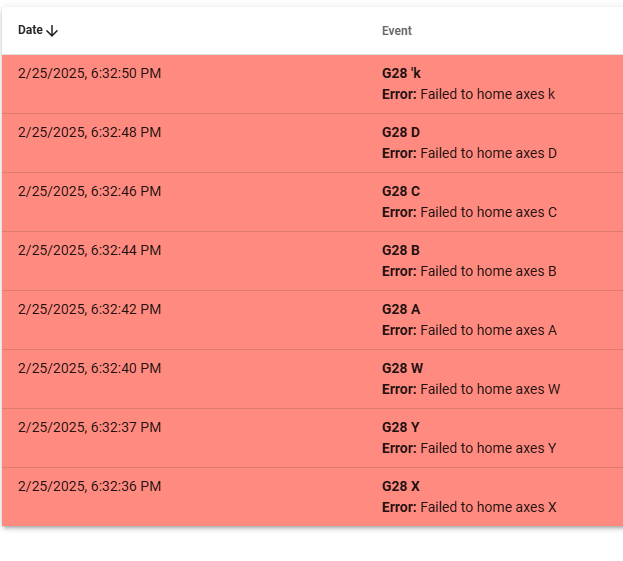
It affects me in that i can't use Input Shaping with Accelerometer from the DWC to help tune and optimize my PNP machine Speed and acceleration . Input Shaping from DWC is using HomeAll button . Not sure if its failing bacause of Z, U, V that have endstop issues
-
; Home X-Axis G91 ; relative positioning G1 H2 X0 ; set axes position explicitly to Zero i.e move X and Y-axis Minimum Homing endstop and stop there G1 H2 X40 F10000 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X-40 F10000 ; go back a few mm G1 H2 X0 ; move X and Y-axis Minimum Homing endstop and stop there (first pass) G90 ; absolute positioningG1 H2 doesn't do what you think it does here.
G1 H2 X0 means to do a zero movement move regardless if the axis is homed or not. G1 H2 moves are meant to leat you move the axis away from an endstop slightly before a homing move, or to raise the z axis before making an X Y move to prevent scraping.
An actual homing move is done with a G1 H1 movement which needs to be long enough to strike the endstop even from the farthest opposing position. It also must be in the direction of the endstop.
-
You are using H2 instead of H1.
You posted that the X endstop is at the low end.
I don't know how long the X axis is but you need something like...
G91 G1 H1 X-999 F5000 ; use a value large enough to move the entire length of the X axis G1 X10 G1 H1 X-15 F500...then based on what the physical position is when stopped by the endstop being triggered
G1 Xnnn ; move to some known position on the axis - note this is a relative move still G92 Xppp ; set the X axis logical position to match the physical positionFrederick
-
@fcwilt
X-axis = 340 mm and Y-axis = 447mm.I think i only have extra additional of -2.0516mm on X-axis on the low end and -4.0244mm on Y-axis
-
@developeralgo222 said in Homeall.g fails when homing all axes:
@fcwilt
X-axis = 340 mm and Y-axis = 447mm.I think i only have extra additional of -2.0516mm on X-axis on the low end and -4.0244mm on Y-axis
OK then your first G1 H1 move would be
G1 H1 X-345 F5000You can pick a speed (the F parameter) that works best for you - it's not critical but you can go too fast.
At what position does the X endstop trigger? Are you treating that as X=0?
Frederick
-
@fcwilt said in Homeall.g fails when homing all axes:
At what position does the X endstop trigger? Are you treating that as X=0?
Yes at X=0. Do i need to test this on the command console or just put them in a homing file and test on DWC ?
something like this on homex.g ?
G91 G1 H1 X-345 F5000 ; use a value large enough to move the entire length of the X axis G1 X10 G1 H1 X-15 F500 G1 X0 G92 X0 G90 -
@developeralgo222 said in Homeall.g fails when homing all axes:
As I mentioned if the endstop triggers at the end of the axis travel and you are treating that as X=0 then you don't need the following:
G1 Xnnn G92 XpppThey are ONLY needed when the endstop is not triggering at X=0
In your case this should work for you:
G91 G1 H1 X-345 F5000 G1 X10 G1 H1 X-15 F500Now if you have specified your X axis with M208 -170:170, meaning X=0 is at the center of the axis you could add the following:
G90 G1 X0 F5000 -
@fcwilt said in Homeall.g fails when homing all axes:
Now if you have specified your X axis with M208 -170:170, meaning X=0 is at the center of the axis you could add the following:
i have M208 X0:340 Y0:447
-
-
@developeralgo222 said in Homeall.g fails when homing all axes:
i have M208 X0:340 Y0:447
That is fine - you don't have to have X=0 at the center of the bed. Some folks just prefer it that way - I am one of them.
Frederick
-
@fcwilt
That worked for X &Y and Z , i am going through all the axes one-by-one following your insights .How do you configure the endstops of a shared z-axis cam based

i have to configure endstops for 6-Nozzles ( 2 Nozzles share a single Z-axis based Stepper motor ) so that they trigger correctly
i.e 3 Stepper Motors for Z, U, V axis but each axis shared with 2 nozzles each with a Z-axis type.
-
@developeralgo222 said in Homeall.g fails when homing all axes:
How do you configure the endstops of a shared z-axis cam based
i have to configure endstops for 6-Nozzles ( 2 Nozzles share a single Z-axis based Stepper motor ) so that they trigger correctly
i.e 3 Stepper Motors for Z, U, V axis but each axis shared with 2 nozzles each with a Z-axis type.
That is not a setup I have seen or heard of.
Does the "Z stepper" turn the cam to raise/lower the nozzle?
Does each nozzle have it's own endstop sensor?
Frederick
-
@fcwilt said in Homeall.g fails when homing all axes:
Does each nozzle have it's own endstop sensor?
Yes, Each Nozzle has its own endstop . With CAM kind of shared axis when it moves down 1 nozzle the other stays at zero or is lifted back to zero point by the spring to where there is a stopper to prevent it from flying over.
-
@developeralgo222 said in Homeall.g fails when homing all axes:
Does each nozzle have it's own endstop sensor?
Yes, Each Nozzle has its own endstop . With CAM kind of shared axis when it moves down 1 nozzle the other stays at zero or is lifted back to zero point by the spring to where there is a stopper to prevent it from flying over.
OK.
Since you are using NPN sensors the outputs pull the inputs they are connected to to ground (GND)
I'm assuming only one of the sensors has the beam of light blocked when the nozzle is down.
If I am reading the spec sheet correctly the white wire is pulled to ground when the beam is blocked.
If so, you would want to connect both of the white wires to the Duet input and use the ! prefix character to treat the low input signal as active.
As before you would have a G1 H1 move in the direction of the sensor.
Are these nozzles simply up or down OR do they move over a range of vertical travel?
Frederick
-
@fcwilt said in Homeall.g fails when homing all axes:
Are these nozzles simply up or down OR do they move over a range of vertical travel?
They move over a vertical range of travel actually from 0 to -/+ 70 before they trigger the endstop . all have a range of -90:90 but technically
so
(1) On Z-Axis Motor , Z1 has a move range from 0 to -90 and Z2 has a move range from 0 to +90. When one is down , then other is always at zero
(2) On U-Axis Motor , Z3 has a move range from 0 to -90 and Z4 has a move range from 0 to +90. When one is down , then other is always at zero
(3) On V-Axis Motor , Z5 has a move range from 0 to -90 and Z6 has a move range from 0 to +90. When one is down , then other is always at zero