Won't HOME after capacitive sensor installed
-
@phaedrux Not sure if I am doing something wrong but added Z-.160 to the G31 command in config.g doesn't add the offset to the Z during a print. Any ideas?
-
You'll have to calibrate the extruder e steps per mm. If you google e steps calibration you'll find some videos that go through it but it basically comes down to measuring a fixed distance on the filament and extruding the same amount and comparing what actually got used and then modifying the steps per mm to get them closer together. I wrote a long post about extruder calibrating a week or so ago if you search you might find it
For print speed you should set that in the slicer.
-
-
@excelon said in Won't HOME after capacitive sensor installed:
@phaedrux Not sure if I am doing something wrong but added Z-.160 to the G31 command in config.g doesn't add the offset to the Z during a print. Any ideas?
Have you varified your z0 position? If you job the nozzle to z0 is it just touching the bed?
Is your mesh compensation accurate? Is it even being loaded? G29 S1 to load the saved height map.
-
@phaedrux Not sure what you mean by " Is your mesh compensation accurate? ". Do I have to run the mesh comp tool once again after I find the correct height?
I was able to get the negative offset to work in the Z axis but I had to add a G30 P1 Z-.160 comand after G31 command. Should I not have to do that?
; Z-Probe
M574 Z5 S2 ; Set Z probe
M558 P5 H5 F240 T6000 I1 ; Set Z probe type to switch and the dive height + speeds
G31 P1000 X-75 Y-45 Z0 ; Set Z probe trigger value, offset and trigger height
G30 P1 Z-.160
M557 X-8:172 Y0:220 S20 ; Define mesh grid -
@excelon said in Won't HOME after capacitive sensor installed:
Do I have to run the mesh comp tool once again after I find the correct height?
I'm not really clear on that actually. I don't think so. As long as the probe is getting a repeatable result I think the mesh should be valid and the height offset would apply to all points.
But what I mean by is your your height map accurate is that if you have mesh compensation active and you move to z1 and then jog the nozzle in X and Y does it actively adjust the z axis to keep the nozzle a steady 1mm away from the bed, or does it seem to get closer or farther as it moves?
A good test of that is to print a bed level test STL that prints some lines across the surface of the bed. If the mesh is accurate it should give a consistent first layer. If it's not some areas might be too squished and others too far away.
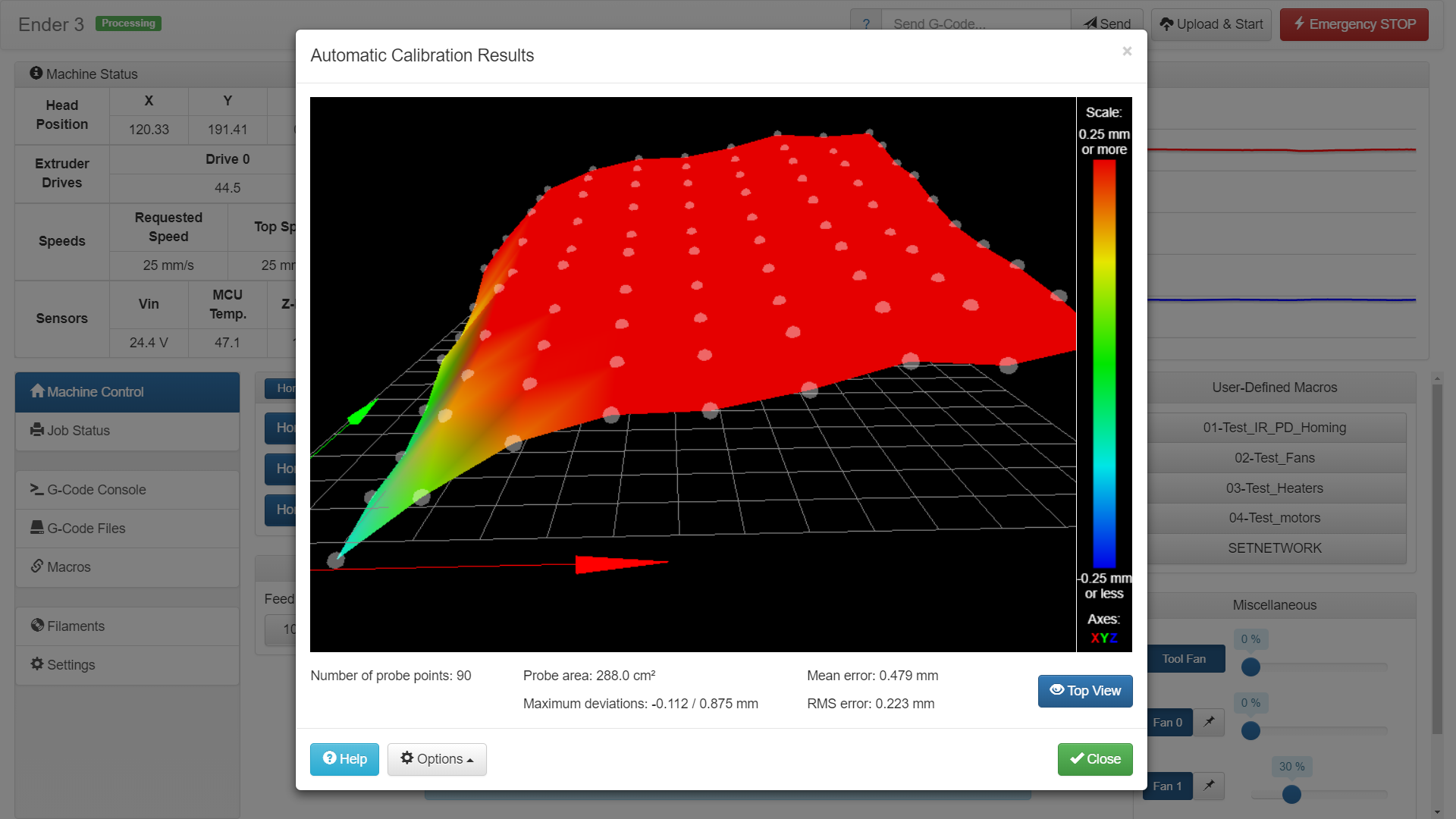
Maybe you can post an image of your mesh compensation result. It can be easier to judge a good map just from looking at it sometimes.
Your g31 doesn't look right. The z value shouldn't be zero. Once you've used that trigger height process using g30 s-1 to measure it you should put that value there.
I'm not sure what that g30 p1 is for but it probably shouldn't be there in config.g. your problem should be resolved once you have a measured value entered in the g31 z in the line above.
Can you post your config.g and homing files as they are now as well? I think you're pretty close to getting everything in place.
-
OK. So, the mesh comp tool/map is active and working 100%. I know this because my bed is pretty messed up from pile driving the nozzle into the corner trying to figure out a few things ( my fault ). Not to mention that I didn't know how to code in the mesh mapping into my gcode and used to have to do it manually, but not anymore, thank you.
As for the G30 P1 in the config.g.... I entered it there because no matter the value I entered in the G31 line, it would make no difference. I know you have said before that I should be able to enter a Z offset in the G31 line, but it doesn't work.
NOTE: I removed the Z neg offset becuase I manually changed it but I would still like to be able to offset Z in the future in case I changed nozzles or the like.Most recent files.....
3_1545799253017_homez (1).g 2_1545799253017_homey.g 1_1545799253017_homex.g 0_1545799253016_homeall (1).g
-

Thank god for auto bed leveling
-
Your home all is a little weird since it does a fast home of x and y, then moves back a little bit and homes z, and then moves some more in x and y.
You should finish all the x and y moves first and then move the probe to the center of the bed and g30 there to get a good center point z height. Use the same coordinates for the homez for consistency.
-
Now just missing config.g
-
@phaedrux 0_1545804443527_config.g
Sorry, I missed that somehow...
-
How exactly would I clean up homeall? I have X and Y going out after the fast moves like you're talking about because of the Z probe hanging off the side of the bed. Please help to make this better if it can. This is only the 3rd day or so ive been on this so I have a lot to learn.
-
@excelon said in Won't HOME after capacitive sensor installed:
@phaedrux 0_1545804443527_config.g
Sorry, I missed that somehow...
Your max speeds and acceleration for X and Y are a little low. Fine for testing but you may want to raise them up for actual prints so you're not capping the slicer. Add a zero to the ends of the current values and you're set.
For home all I'm not sure what you mean by the probe hanging off the edge. I had posted a fixed homeall above I think.
When I get back to my computer later tonight I can post a better example. In the mean time, check the setting up a Cartesian guide in the wiki, specifically the homing files section and compare what's there to what you have to see what I mean.
-
This is what I would use for homeall.g
G91 ; relative positioning G1 Z5 F6000 S2 ; lift Z relative to current position G1 S1 X-235 Y-235 F1800 ; move quickly to X and Y axis endstops and stop there (first pass) G1 X5 Y5 F6000 ; go back a few mm G1 S1 X-100 Y-100 F300 ; move slowly to X and Y axis endstops once more (second pass) G90 ; absolute positioning G1 X190 Y160 F6000 ; put probe over the centre of the bed G30 ; probe the bed for z height G1 X0 Y0 ; return to home position Remove the G30 P# from config.g
Then use this to find the probe trigger height
G90 ; absolute positioning G1 X115 Y115 F6000 ; move nozzle to center of bed ; Jog the nozzle down until it touches the bed ; if it gets to Z0 but still doesn't touch, send G92 Z10 to trick it to think it's at 10mm, and then slowly jog it down until it is touching. ; When it's touching, send G92 Z0 G30 S-1 ; do a trigger height measurement probe The result of the trigger height will be shown in the console. Use that value in G31 Z in config.g Now when you homez it should give you an accurate Z position. Z0 should touch the bed. -
@phaedrux said in Won't HOME after capacitive sensor installed:
G90 ; absolute positioning
G1 X115 Y115 F6000 ; move nozzle to center of bed
; Jog the nozzle down until it touches the bed
; if it gets to Z0 but still doesn't touch, send G92 Z10 to trick it to think it's at 10mm, and then slowly jog it down until it is touching.
; When it's touching, send G92 Z0
G30 S-1 ; do a trigger height measurement probe
The result of the trigger height will be shown- list itemin the console. Use that value in G31 Z in config.g
Thank you for the homeall.g!!! It's so much cleaner and a lot less movements. I am understanding the code more and more, and then it even helps more to get your version and see it in action and what I could have done.
As for the config.g code. Am I replacing the Z-probe section altogether? Current z-probe is as follows...
; Z-Probe
G29 S1
M574 Z5 S2 ; Set Z probe
M558 P5 H5 F240 T6000 I1 ; Set Z probe type to switch and the dive height + speeds
G31 P1000 X-75 Y-45 ; Set Z probe trigger value, offset and trigger height
M557 X-8:172 Y0:220 S20 ; Define mesh grid
-
The way you have the zprobe section right now is fine, you g31 just needs a Z parameter. You et that from measuring the trigger height as described.
-
@phaedrux Thats the problem, though. entering a Z height in the G31 line like you mentioned doesn't have an effect.
-
What value do you get when you measure it with g30 s-1?
-
@phaedrux
Ok, Sorry. I think I get it now. Lowering the nozzle to the bed and tricking the software to think its higher, AND THEN registering zero when it’s at its lowest point and touching the bed. Now, when entering a negative Z value on line G31 will allow it to go beyond the -0- threshold and to the squish zone where I have been killing myself to get to? -
Well the measured value will likely be positive because the probe is above the nozzle and should trigger before the nozzle actually touches the bed. But then it should make z0 equal z0 and 0.2 equal 0.2.