CR10 S5 upgrade to Duet 2 Wifi
-
@NexxCat
I have just checked the wiring diagram:
Pin 1: To Red
Pin 2: To Blue/Brown
Pin 8: To Orange/YellowThis is as per: https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe
This is how I have it wired
I have added the I1 to both, but still not deploying
NB: This is not deploying on HOMING the Z as I cant run the mesh bed before homing.
-
@GT1Za
Hmm, and you still have the config.g M307 set to H3?Looks like the BLTouch isn't receiving the servo signal. The "I" parameter in the deploy and retract is needed because we're wired directly into the expansion connector, if you had a Duex, it wouldn't be required, but with the correct heater configured (heater 3), and the inversion, it should work

Edit: Can you post your homez.g and homeall.g please?
-
in the config.g:

; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Fri Mar 20 2020 11:57:17 GMT+0200 (South Africa Standard Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-515 Y-515 F3000 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-515 Y-515 F240 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z-505 F240 ; move Z down stopping at the endstop
G90 ; absolute positioning
G92 Z0 ; set Z position to axis minimum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Fri Mar 20 2020 11:57:18 GMT+0200 (South Africa Standard Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 Z-505 F3000 ; move Z down until the endstop is triggered
G92 Z0 ; set Z position to axis minimum (you may want to adjust this); Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
@GT1Za
Ok, the home macros aren't configured for a z-probe. Here are mine:; homez.g ; called to home the Z axis ; M290 R0 S0 ; Reset babystepping G91 ; relative positioning G1 Z5 F6000 S2 ; lift Z relative to current position G90 ; absolute positioning G1 X118 Y148 F6000 ; go to the bed centre and home Z G30 ; home Z by probing the bed; homeall.g ; called to home all axes ; M290 R0 S0 ; Reset babystepping G91 ; relative positioning G1 Z5 F6000 S2 ; lift Z relative to current position G1 S1 X-305 Y-305 F3600 ; move quickly to X and Y axis endstops and stop there (first pass) G1 X5 Y5 F6000 ; go back a few mm G1 S1 X-305 Y-305 F360 ; move slowly to X and Y axis endstops once more (second pass) G90 ; absolute positioning M98 Pdeployprobe.g ; deploy mechanical Z probe G1 X118 Y148 F6000 ; go to the bed centre and home Z G30 ; home Z by probing the bed M98 Pretractprobe.g ; retract mechanical Z probeYou'll need to adjust X and Y in both for your printer because you are 500x500.
-
wow ok a whole new issue
in homez.g
G1 X118 Y148 F6000 ; go to the bed centre and home ZI changed to:
G1 X250 Y250 F6000 ; go to the bed centre and home Zthis should be the center of the bed. but it tried to send it way off and I had to hit stop.
The Y steps dont seem to be right as 150 is taking me just short of center. 250 basically made it travel off and I had to hit stop.
The good news is the probe worked! -
@GT1Za
Did you also adjust:G1 S1 X-305 Y-305 F3600to
G1 S1 X-515 Y-515 F3600and
G1 S1 X-305 Y-305 F360to
G1 S1 X-515 Y-515 F360 -
Yes I did.
The Y is just going too far. Everything else is as its meant to be -
@GT1Za
What happens if you manually home X and Y in the web UI, then use the jog controls to move them. Do they move the expected distance? -
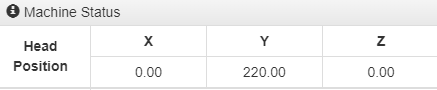
No, Y is only moving to roughly 220 before it maxes
-
@GT1Za
When it hits the maximum distance, what does the web UI say for the Y co-ordinate? You've got 80 steps/mm in the config, so that would be right for a 1.8 degree stepper with a 20 tooth GT2 pulley. -
coords show the Y at 220, and you could here it slipping for like a second.
-
@GT1Za
I'm assuming when you home Y, it does home correctly and the Y co-ordinate is reported as 0? -
@NexxCat yes the homing works fine and reports 0
-
@GT1Za
and just so I've got this right in my head. Starting from Y home, you move the bed using the jog controls and when Y is reported at 220, the bed is actually at the end of it's travel (IE, at 510)? -
@NexxCat
thats correct
I havent homed the other axis so they are reporting 0 here.
-
@GT1Za
The only explanation I have for that is that the Y axis steps/mm aren't correct. Can you take a photo of the Y axis motor and pulley? I'll see if I can tell whether it's a 20T or not. -
not sure if that helps. Pretty tough getting to the back of this printer.
The motor is about double the height of the normal ones, but its the standard S5 motor.
https://3dprinting.stackexchange.com/questions/7692/stepper-motor-for-cr10-s5-y-axis -
@GT1Za
I'm afraid I'm stumped on this one. That looks like a normal 20 tooth pulley and I've checked the Marlin source for the CR10 S5. It definitely uses 80 steps/mm.If the bed was moving an insufficient distance, I'd say maybe the stepper was skipping, or the belt was loose, but it's moving too much which doesn't make sense.
Probably a stupid question, but have you tried powering the Duet off and on again, letting it re-load config.g?
-
@NexxCat Ill give it a shot now
-
@NexxCat Restart made no difference.

