Duet3 Expansion Board 3HC - No CAN-Connection
-
Hi dear community,
I've worked a lot with all different Duet2 boards so far.
Now for the first time with Duet3 (V1.0) and Expansion Board 3HC (V1.0). The Duet3 is already running and the configuration of the RRF3 is working so far. So far I have not been able to connect to the 3hc.
I also think the documentation for this is still a little bit.
I created the firmware with the Configuration Tool and also selected the 3HC there.
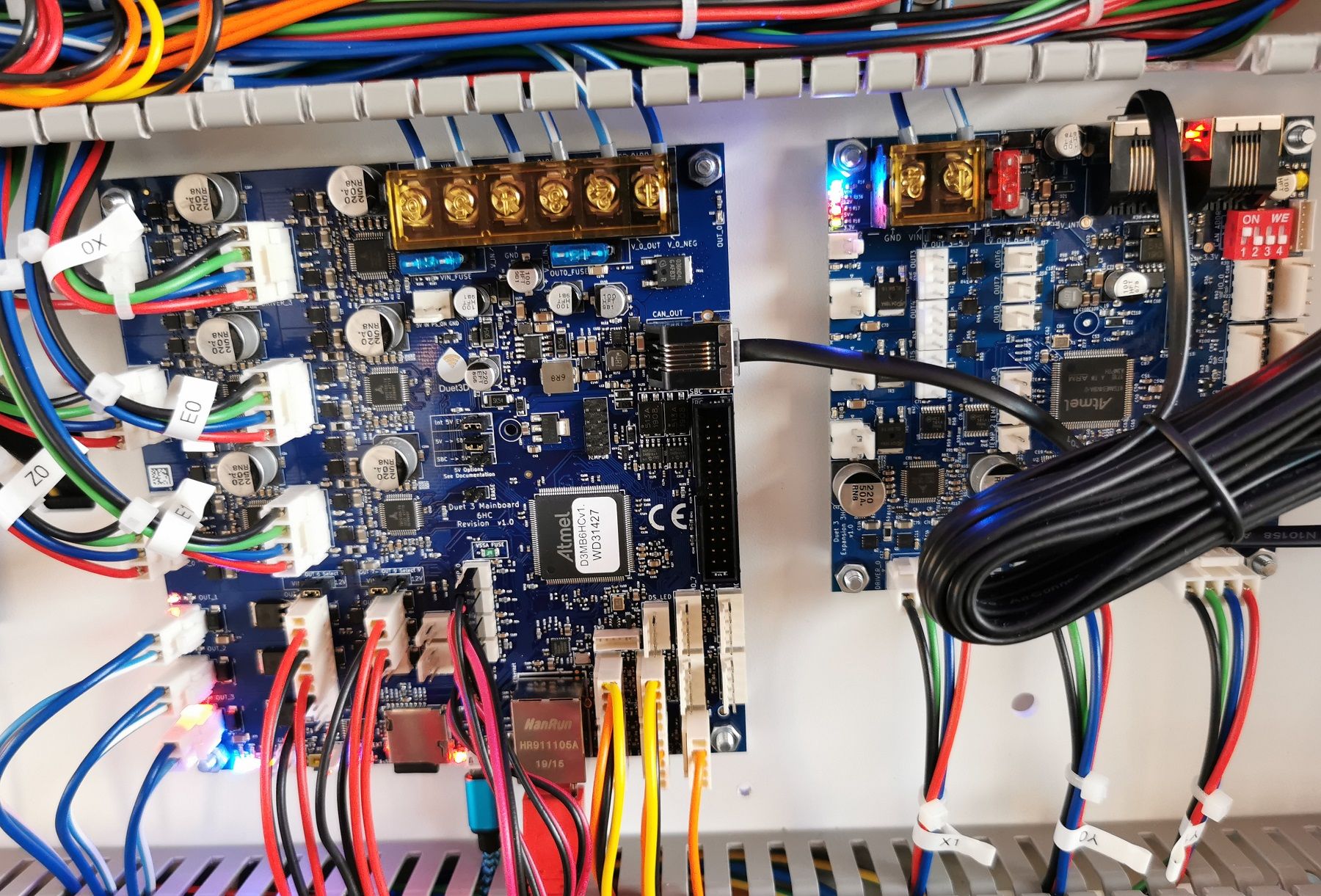
I have an RJ11 cable between the boards (not crossed) and the HC3 is also supplied with 24V.
The Diag LED keeps flashing on me. This means that there is no CAN connection in the document. Does the ExpansionBoard still have to be put into operation? what am I doing wrong?
How can I check the CAN-Connection?
Thank you so much!
Regards Christian (CR-3D)
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D said in Duet3 Expansion Board 3HC - No CAN-Connection:
The Diag LED keeps flashing on me. This means that there is no CAN connection in the document
which document is this? a lot of users are posting the board isn't working because the LED is blinking - while a steady 1hz blink is normal, sounds like something should be updated?
-
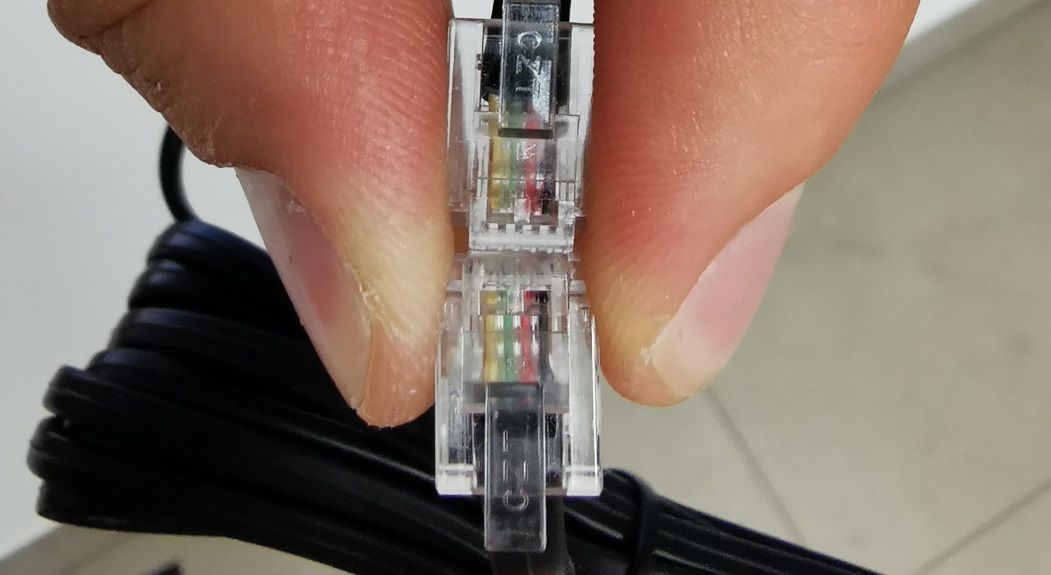
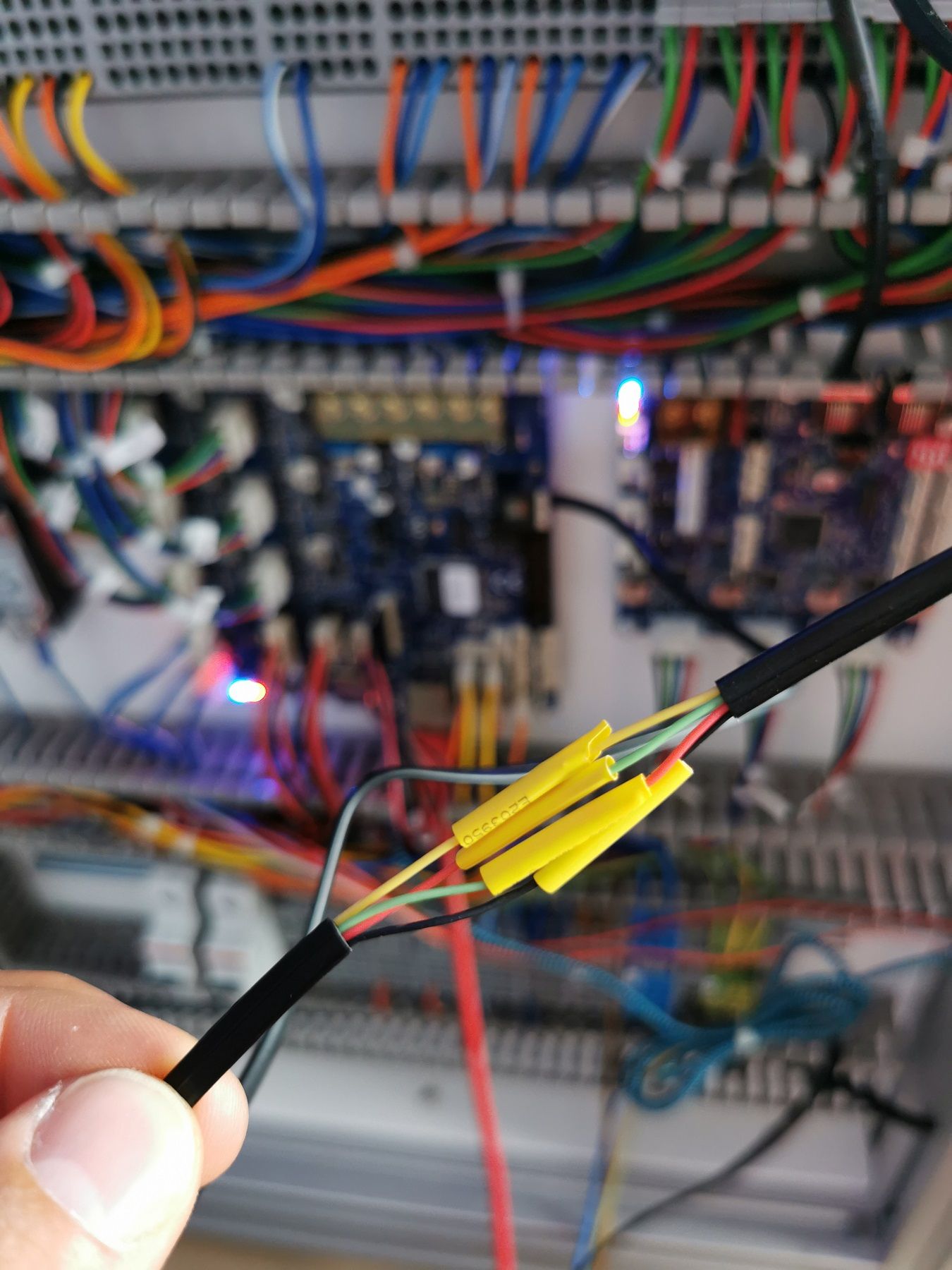
I may be wrong here, but from my point of view is your cable wrong. The Black wire is on the far right at the top connector but on the far left if you would hold the connector into the same direction.
And I have the two pins in the middle crossed. That is needed for the first cable in the bus, if I understood the documentation correctly.
Nice cable management by the way.

-
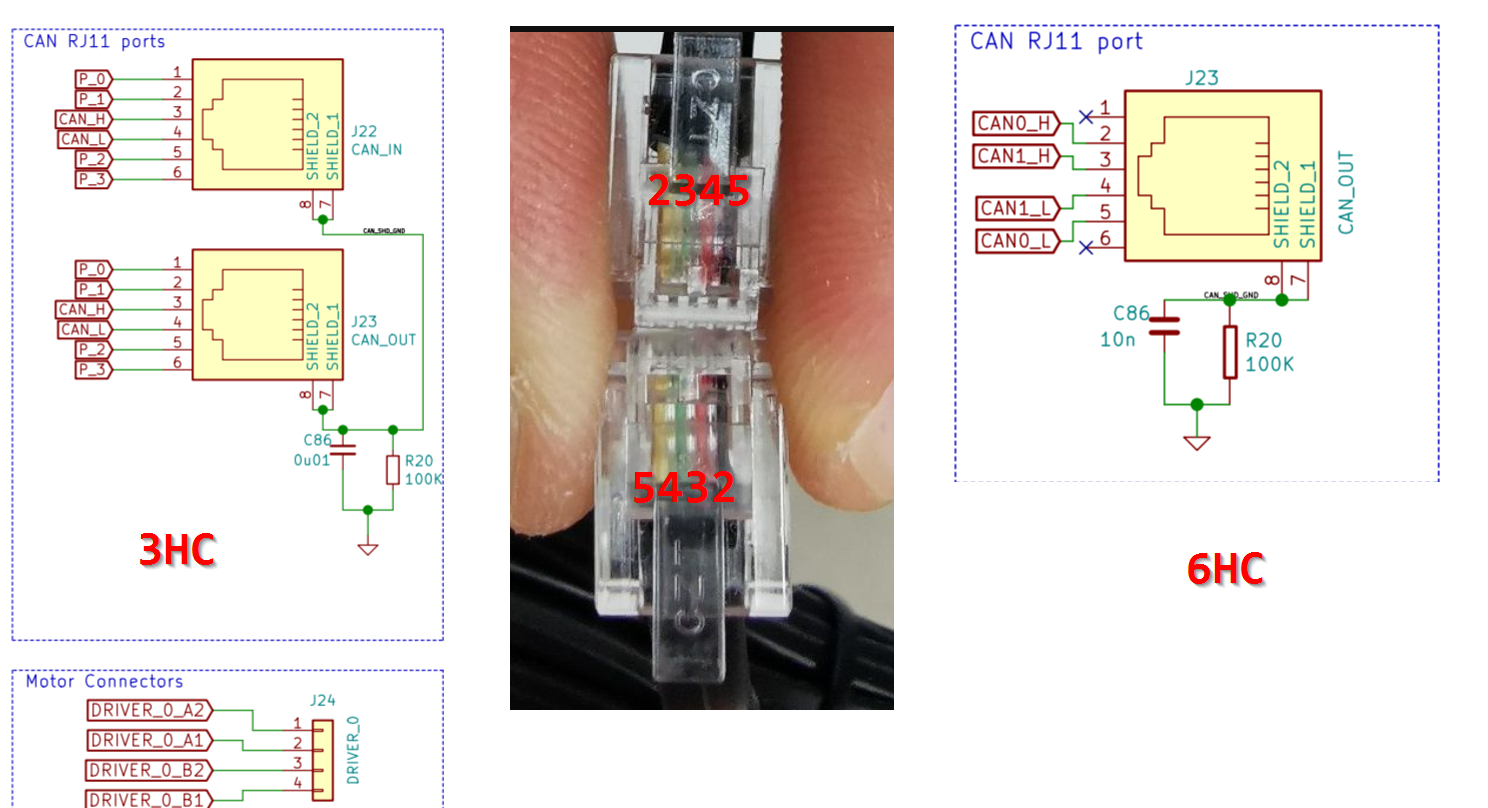
CAN H and L should not be crossed (twisted pair does not cross the pins). So pin 3 from the 6HC to pin 3 on the 3HC, but @CR3D shows cabling that connet 5 to 1, and 3 to 4 so thats wrong.
-
@bearer I can tell only what I did and that works for me. So pin 1 is pin 1, pin 4 is pin4 and the two in the middle is crossed. At least at my working setup. Im on the sofa with my tablet. So im a bit limited.....
-
@Chriss if your way was right it would work for OP.. the black and yellow are not used by the 3HC, and the green and red are (incorrectly) crossed over.
-
Hmmmmm....
https://duet3d.dozuki.com/Wiki/Getting_Started_With_Duet_3
Says
Only a single twisted pair is required, connected to pins 3 and 4 (the middle 2 pins) of the connector.But yours seems crossed to me. (Yes I had to correct my former words.)
-
So the lower connector in OPs photo is correct if you want to be pedantic about colour coding, but top one is reversed. Easier to check the colours if you flip one end up side down so the pins line up 1:1, 2:2 etc.
In any case @CR3D needs to swap the red and green wires on one end of his cable.
-
@bearer
Ok thank you very much! I will test it
")
-
@bearer
Which cable did you buy? I can not find a right one at the moment...
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D said in Duet3 Expansion Board 3HC - No CAN-Connection:
Which cable did you buy? I can not find a right one at the moment...
I didn't, don't have an expansion but I would just terminate my own as needed (already have the tools for RJ45 so it will do RJ11, RJ12 and RJ14 as well).
But if you purchased the cable made like that, that is a little surprisng, not a standard setup for phones afaik. Aaaanyways, what you can do as a work-around is just cut one end off, strip the insulation back and connect the green to red, and red to green as demonstrated by my brother with an RJ45 jack here:
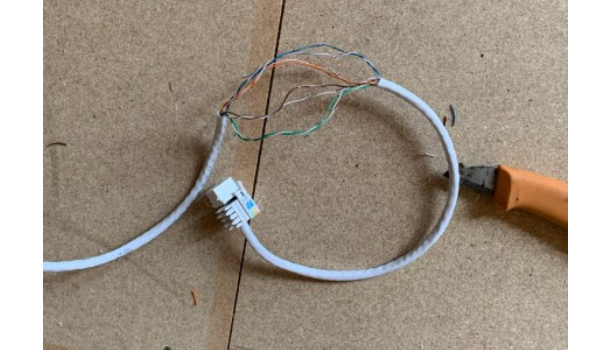
(and then as he did, invite a friend with the tools to come fix it later:) -
@CR3D said in Duet3 Expansion Board 3HC - No CAN-Connection:
Which cable did you buy? I can not find a right one at the moment...
DC42's commendation is to use high speed ADSL2 cables such as these https://www.kenable.co.uk/en/computer-cables-peripherals/adsl-rj11-cables/7935-adsl-2-high-speed-broadband-modem-cable-rj11-to-rj11-05m-black-007935-5055383479351.html
-
@bearer
I made the same today... and it works!!!!
Thank you a lot
Now I have other "Problems"... but I am not sure. Perhabs I should open a new Thread....
-
(you didn't need the black and yellow, but it won't hurt either)
if its still CAN related you'll probably still attract the right people, if not move to another thread as it makes it easier for the community to help you
-
@bearer
To be honest, I don't know what it has to do with it yet.
But it still has to do with the 3HC.I connected 9 motors to my printer.
It is a Cartesian with triple Z-axis and IDEX systemMotherboard:
3x Z-axis
1x X-axis
2x extrudersExpansion board
1x U-axis
2x Y-axis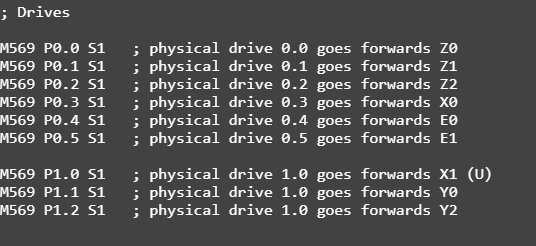
The endstops are connected to the mainboard:
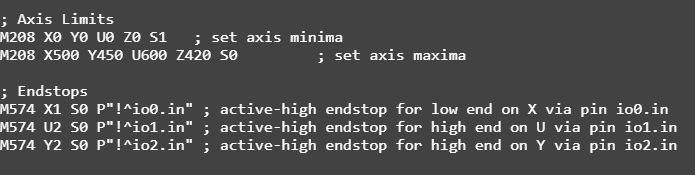
The drives which are attached to the mainboard work wonderfully. Even if I check the limit switches, the signals are correct. However, the homing of the U-axis and the Y-axis is not yet working properly.
The Homing File of the U-Axis looks like the X-Axis.
The motors rotate very slowly and do not react correctly to the limit switch. even if homing is canceled, the motors continue to rotate ...
I can't really explain it to myself honestly ...
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
if i'm reading that right you have the endstops on the main board?
ref https://duet3d.dozuki.com/Wiki/Duet_3_firmware_configuration_limitations
-
@bearer
Yes, I had that in mind!
I had already tested putting these endstops on the expansion board. So far the same problem .. but I can test it again ...
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D if you use RRF3, M574 S0 is no longer supported: "Endstop type S0 (active low switch) is no longer supported in M574 commands." please check https://duet3d.dozuki.com/Wiki/Gcode#Section_M574_Set_endstop_configuration and use S1 with ! instead.
-
@CR3D said in Duet3 Expansion Board 3HC - No CAN-Connection:
So far the same problem
post the config for that when you do, copy past the text and use the formatting function here makes it much easier to read. (on the toolbar with bold, italics, its the fifth from the left to format as code which makes it nice and readable)
-