Duet3 Expansion Board 3HC - No CAN-Connection
-
@deckingman said in Duet3 Expansion Board 3HC - No CAN-Connection:
Just stumbled across this thread and I haven't read every post so might have missed something. However, I did notice quite a few things that are wrong with the config.g.
Firstly, the commands M350, M92, M566 M203, M201 and M906 are per axis, not per motor so all those colon separators need to be removed. (But keep the colons between the extruders because extruders are treated like individual axes).
Secondly, you have created an additional "U" axis but you have not set any of those above parameter for that U axis. So all those M350 through to M906 commands need to have U values as well as XYZ, and E.Ok... you are absolutely rigth! Shame on me!
I changed this now....
@dc42
You are also right... there is an older firmware ... now I want to Upload with Bossa but there is no connection... The board is erased now...Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D said in Duet3 Expansion Board 3HC - No CAN-Connection:
now I want to Upload with Bossa
thats usually a recovery option, and a few people have struggled due to bad usb cables and/or ports, as well as there seems to be a bug in Bossa affecting some users, but not all. M997 and/or DuetWebControl is the preferred option.
have you tried other cables/ports? can you try a different computer (/operating system)? some have found it helps using a USB hub.
I've generally found it works well from Raspberry Pi's, but others have also had encounters with the aforementioned bug there.
-
@bearer
Yes i tested a new USB Cable and it worked!
@dc42 Now the Main Board and the Expansion Board hast the newest firmware.... Thank you!
The Homing of the X-Axis and U-Axis works well now, but the Y-Axis doesn´t...
the y-motors turn but do not yet react to the end stop. The Y axis works with 2 motors and an end stop (connected to 1.io2.in). the endstop is read out correctly, I have already checked that if I unplug it, of course it does not react, so it is properly connected. where do I still have the error here?
.
-
Any ideas here?
I can not find a mistake till now....
-
Does DWC display the correct triggered/not triggered status for the Y endstop, or not?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Yes... if i manually move the axis the signal is shown right...
The sensor is correctly connected and also correctly mapped to the Y axis.
The sensor is correctly connected and also correctly connected to the Y axis.
If I actuate the limit switch of the Y axis before homing (i.e. put the axis in home position), the Y axis reacts and sets the axis as referenced.
If the limit switch is not actuated when homing, so the axis should move in the direction of the limit switch, the message "Homing failed" appears. I configured it so that my bed moves down a distance first. If homing failed occurs, the bed moves back to the starting position but the Y motors continue to rotate and do not react to the limit switch.
If I reference the axis manually with G92 Y0, I can also move the axis correctly.
Everything seems to be correct, but the normal homing of the Y axis does not work.
The config was created with the configuration tool. The homing of the other axes also works perfectly.
; homey.g ; called to home the Y axis ; ; generated by RepRapFirmware Configuration Tool v3.1.3 on Fri Jun 19 2020 21:08:48 GMT+0200 (Mitteleuropäische Sommerzeit) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Y455 F1800 ; move quickly to Y axis endstop and stop there (first pass) G1 H2 Y-5 F6000 ; go back a few mm G1 H1 Y455 F360 ; move slowly to Y axis endstop once more (second pass) G1 H2 Z-5 F6000 ; lower Z again G90 ; absolute positioningChristian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D said in Duet3 Expansion Board 3HC - No CAN-Connection:
If the limit switch is not actuated when homing, so the axis should move in the direction of the limit switch, the message "Homing failed" appears. I configured it so that my bed moves down a distance first. If homing failed occurs, the bed moves back to the starting position but the Y motors continue to rotate and do not react to the limit switch.
- I'm not clear about which bit is going wrong, so please can you tell me:
- If the switch is already actuated when you give the home command, does the axis move, do you get the "Homing failed" message, and if so does the message appear before or after the Y axis stops moving?
- If the switch is not already actuated, does the axis move, if so what happens when you trigger the switch, and exactly when do you get the "Homing failed" message?
-
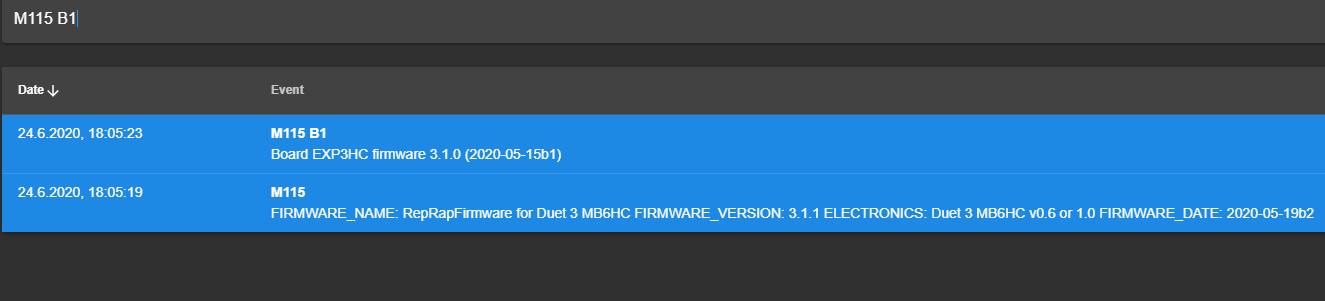
Also, please confirm that M115 B0 reports firmware 3.1.1, and M115 B# (where # is the expansion board address) reports firmware 3.1.0.
-
Please post your complete config.g file.
-
The Firmware is the newest one:
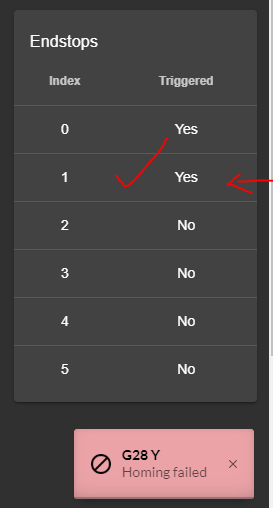
So for Case 1: Endstop triggerd before homing
The engine turns very briefly in the direction away from the end stop (which is normal in my opinion)
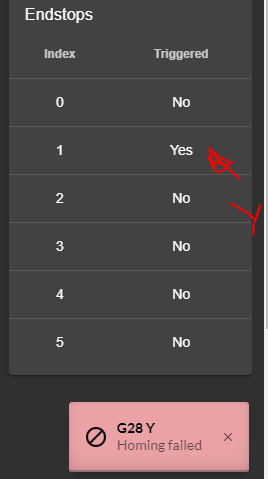
I get no Homing failed messageCase 2: End stop not triggered before homing
Z axis moves down
Y-axis moves towards end stop
Z axis moves up again
Homing failed is displayed
Y-axis continues to move and does not react!
However, the screen shows that the state of the end stop is changing!config.g
; Configuration file for Duet 3 (firmware version 3) ; General preferences G90 ; send absolute coordinates... M82 ; and absolute extruder moves M550 P"I444-S" ; set printer name ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S1 ; physical drive 0.0 goes forwards Z0 M569 P0.1 S1 ; physical drive 0.1 goes forwards Z1 M569 P0.2 S1 ; physical drive 0.2 goes forwards Z2 M569 P0.3 S0 ; physical drive 0.3 goes backwards X1 (U) M569 P0.4 S0 ; physical drive 0.4 goes backwards E0 M569 P0.5 S0 ; physical drive 0.5 goes backwards E1 M569 P1.0 S0 ; physical drive 1.0 goes forwards X0 M569 P1.1 S0 ; physical drive 1.0 goes backwards Y0 M569 P1.2 S1 ; physical drive 1.0 goes forwards Y1 M584 X1.0 Y1.1:1.2 U0.3 Z0.0:0.1:0.2 E0.4:0.5 ; set drive mapping M350 X16 Y16 U16 Z16 E16:16 I1 ; configure microstepping M92 X80.00 Y35.56 U80 Z800 E415:415 ;set steps per mm M566 X900 Y900 U900 Z12 E120:120 ;set maximum instantaneous speed changes (mm/min) M203 X30000 Y30000 U30000 Z300 E9000:9000 ;set maximum speeds (mm/min) M201 X1000 Y1000 U1000 Z20 E1000:1000 ;set accelerations (mm/s^2) M906 X1400 Y4200 U1200 Z1200 E1000:1000 I30 ;set motor currents (mA) M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 U0 Z0 S1 ; set axis minima M208 X500 Y450 U600 Z420 S0 ; set axis maxima ; Endstops M574 X1 S1 P"!1.io1.in" ; active-high endstop for low end on X via pin io0.in M574 U2 S1 P"!io0.in" ; active-high endstop for high end on U via pin 1.io1.in M574 Y2 S1 P"!1.io2.in" ; active-high endstop for high end on Y via pin 1.io2.in ; Z-Probe (Piezo) M558 P5 I1 C"!io3.in" R1.0 H5 F200 6000 ; Z probe type -> Piezo M557 X120:400 Y20:400 P04:04 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B4092 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M308 S2 P"temp2" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 2 as thermistor on pin temp2 M950 H2 C"out2" T2 ; create nozzle heater output on out2 and map it to sensor 2 M307 H2 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit ; Fans M950 F0 C"out7" ; create fan 0 on pin out7 and set its frequency M106 P0 S0 H1 T50 ; set fan 0 value. Thermostatic control is turned on M950 F1 C"out8" ; create fan 1 on pin out8 and set its frequency M106 P1 S1 H2 T50 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"out4" ; create fan 2 on pin out4 and set its frequency M106 P2 S1 H-1 ; set fan 2 value. Thermostatic control is turned off M950 F3 C"out5" ; create fan 3 on pin out5 and set its frequency M106 P3 S1 H-1 ; set fan 3 value. Thermostatic control is turned off ; Tools M563 P0 S"Links" D0 H1 F0:2 ; define tool 0 G10 P0 X0 Y0 Z0 S0 R0 ; set tool 0 axis offsets G10 P0 R0 S0 ; active and standby temperatures M563 P1 S"Rechts" D1 H2 X3 F1:3 ; define tool 1 G10 P1 Y0 U0 Z0 S0 R0 ; set tool 1 axis offsets G10 P1 R0 S0 ; active and standby temperatures ; Custom settings are not defined ; Open Door Switch M581 T0 C"1.io3.in" S0 C0 ;trigger #2 (calls trigger2.g) ; LED M950 F3 C"out3" Q500 ; create fan 3 on pin out5 and set its frequency M106 P3 S1 ;set fan 3 value. Thermostatic control is turned off ; Miscellaneous M501 ; load saved parameters from non-volatile memory T0 ; select first tool M572 D0 S0.03Home.y
; homey.g ; called to home the Y axis ; ; generated by RepRapFirmware Configuration Tool v3.1.3 on Fri Jun 19 2020 21:08:48 GMT+0200 (Mitteleuropäische Sommerzeit) G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Y455 F1800 ; move quickly to Y axis endstop and stop there (first pass) G1 H2 Y-5 F6000 ; go back a few mm G1 H1 Y455 F360 ; move slowly to Y axis endstop once more (second pass) G1 H2 Z-5 F6000 ; lower Z again G90 ; absolute positioning -
now i have the same phenomenon with the x axis. This axis is also controlled from the 3HC.
Here it is a bit different ... the end stop reacts to the first hint, then reduces the speed and then it no longer reacts to the second trigger ...
The other axes, which are controlled by the main board, work perfectly ...I really have no idea what is the problem here ...
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D Bit of a long shot here but try this. After the first G1 H1 (first pass), the axes will (should) be flagged as homed. So after that, you don't need to use the H2 parameter to move away from the end stop. Try taking out that H2 in those G1 Y-5 and X-5 moves( but you ned to leave it in for the Z moves).
-
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
I think we can narrow down the error further ... it definitely has something to do with the 3HC ....
I have now put X0 and Y on the mainboard and the homing of X0 and Y worked!
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
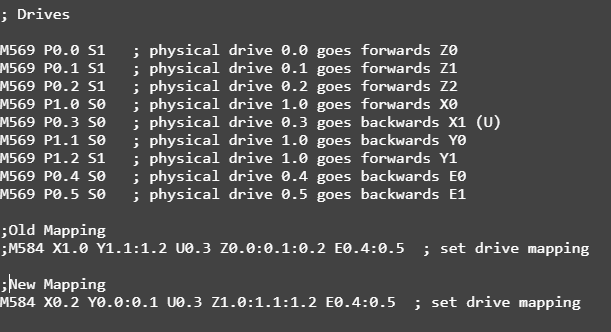
@CR3D what is strange that the Y had different rotation directions: S0 and S1 when on 1.1 and 1.2. In your original config (Jun 23rd) it was same direction. In your new mapping it's S1 both again. Do you have different stepper wirings? (or direction is wrong and your Z isn't working now, S0-S0-S1)
-
No ... you are right...
but that's right ... I need different directions ... before that it was set wrong ... and here I also had a mistake ... but the directions have nothing to do with it ... I only had a few things were adjusted and at the beginning I had not installed any straps ...
the error only ever occurs when I control the axes from the 3HC, ...
-
I've made a note to try to reproduce this next week. It looks like a firmware bug to me.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in Duet3 Expansion Board 3HC - No CAN-Connection:
I've made a note to try to reproduce this next week. It looks like a firmware bug to me.
No problems here with my CoreXYUVAB and assorted motors/end stops/expansion boards. The only thing that jumps out at me is that the OP has end stops on the high end whereas mine are all at the low end. So if there is a bug, it might be related to using end stops at the high end?? Just a thought...................
-
I was thinking the the original issue might be related to using more than one Y motor.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in Duet3 Expansion Board 3HC - No CAN-Connection:
I was thinking the the original issue might be related to using more than one Y motor.
I'm using 3off Y motors. But thinking about it, they get re-mapped to individual axes for homing so you could well be right.