G29S1 not loading during print and G32 not leveling properly
-
@moe-adams9093 said in G29S1 not loading during print and G32 not leveling properly:
No it’s aluminum 6061
If you have the resources you may want to upgrade.
This is from one of my suppliers:
Cast Aluminum Plates have a precision machined surface for superior flatness, flat within .015'', and +/- .005'' thickness tolerance,
Frederick
-
If you have the means you might be able to bash it into flatness, or at least take out the worst of the peaks and valleys.
-
@Phaedrux said in G29S1 not loading during print and G32 not leveling properly:
bash it into flatness
I think machinists might cringe at that.
")
Frederick
-
@fcwilt At least I didn't suggest parking a car on it. ..Yet
-
@Phaedrux said in G29S1 not loading during print and G32 not leveling properly:
@fcwilt At least I didn't suggest parking a car on it. ..Yet
I hadn't thought about that approach - good idea.
Maybe something with treads - like a tank.
Frederick
-
@Phaedrux I'm going to drive on top of it and see if that will make it flat
-
I was thinking a carbon fiber sheet plate
-
@moe-adams9093 said in G29S1 not loading during print and G32 not leveling properly:
I was thinking a carbon fiber sheet plate
That sounds interesting but I have no idea what it is.
Frederick
-
So after spending lots of hours calibration and testing my G29 S1 command is not loading during print. When I run G32 and G29 I get both messages in blue that adjustment made and calibration good to go but still during print I have monitored my z-axis and they don’t baby steps to compensate with the deviation points at all. I don’t know what causing this . In my gcode start file I included the following code
G28;
G32;
G29 S1;My original printer is running on 2.05 duet maestro and it works fine when I run G32 and G29 S1 in my start gcode. So I’m not sure what’s causing this problem.
-
-
If you run G29 S1 from the console, do you see any error messages?
-
After running G29 S1, run M122. In the resulting report, what does it say after "Bed compensation:" ?
-
-
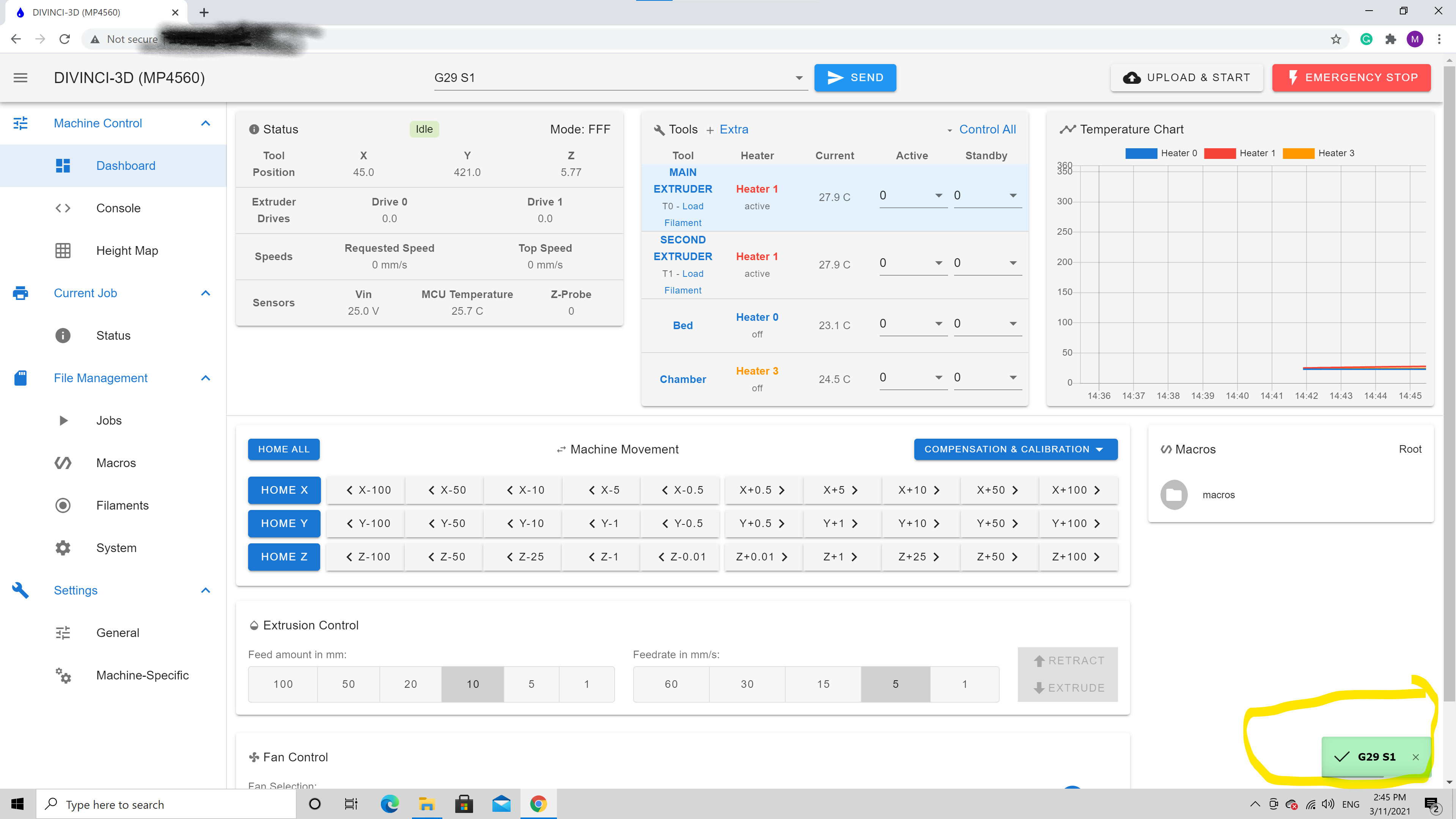
Ok here's when I run G29 S1 it will give me a green check I will post a screenshot
 .
.
after that I ran M122 and here's my resultsM122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.1.1 running on Duet Ethernet 1.02 or later + DueX5 Board ID: 08DLM-996RU-N8PS0-7J9D8-3S86T-1B8VP Used output buffers: 3 of 24 (17 max) === RTOS === Static ram: 27980 Dynamic ram: 94736 of which 44 recycled Exception stack ram used: 488 Never used ram: 7824 Tasks: NETWORK(ready,392) HEAT(blocked,1224) DUEX(suspended,160) MAIN(running,1640) IDLE(ready,80) Owned mutexes: === Platform === Last reset 00:07:49 ago, cause: power up Last software reset at 2021-03-11 02:14, reason: Stuck in spin loop, spinning module GCodes, available RAM 7648 bytes (slot 0) Software reset code 0x4083 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f80f BFAR 0xe000ed38 SP 0x20002e24 Task NETW Stack: 00457b03 0045b480 410f0200 3e4ccccd 40a38800 41de202f 37c87400 3331bb4c 40000000 3f317200 b5ddea0e Error status: 0 MCU temperature: min 17.2, current 26.5, max 26.7 Supply voltage: min 25.0, current 25.0, max 25.1, under voltage events: 0, over voltage events: 0, power good: yes Driver 0: standstill, SG min/max not available Driver 1: standstill, SG min/max not available Driver 2: standstill, SG min/max 0/271 Driver 3: standstill, SG min/max not available Driver 4: standstill, SG min/max not available Driver 5: standstill, SG min/max 0/226 Driver 6: standstill, SG min/max 0/292 Driver 7: standstill, SG min/max not available Driver 8: standstill, SG min/max 0/230 Driver 9: standstill, SG min/max not available Date/time: 2021-03-11 14:48:25 Cache data hit count 958208999 Slowest loop: 20.70ms; fastest: 0.13ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 1.5ms, write time 0.0ms, max retries 0 === Move === Hiccups: 0(0), FreeDm: 169, MinFreeDm: 165, MaxWait: 118463ms Bed compensation in use: mesh, comp offset 0.000 === MainDDARing === Scheduled moves: 40, completed moves: 40, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = 3 -1 -1 -1 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 8.92ms; fastest: 0.02ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 1 of 8 Interface state active, link 100Mbps full duplex === DueX === Read count 6, 0.77 reads/min and here's my latest config file
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Tue Oct 13 2020 21:14:55 GMT-0500 (Central Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"DIVINCI-3D (MP4560)" ; set printer name M669 K1 ; select CoreXY mode ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P10 R1 T3:3:10:10 S1 ; physical drive 0 goes forwards M569 P11 R1 T3:3:10:10 S1 ; physical drive 1 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M569 P4 S0 ; physical drive 4 goes forwards M569 P5 S1 ; physical drive 5 goes Backwards M569 P6 S1 ; physical drive 6 goes Backwards M569 P8 S1 ; physical drive 7 goes Backwards M569 P2 S1 ; physical drive 9 goes backwards M584 X10 Y11 Z5:6:8:2 E3:4 ; set drive mapping M671 X50.0:450.0:450.0:50.0 Y50.0:50.0:450.0:450.0 S2 ; ZBelts Near Locations M350 X16 Y16 Z16 E16:16 I1 ; configure microstepping with interpolation M92 X40 Y40 Z412.00 E420.00:420.00 ; set steps per mm M566 X10000 Y10000 Z800 E600:600 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z800 E6000:6000 ; set maximum speeds (mm/min) M201 X8000 Y8000 Z800 5000:5000 ; set accelerations (mm/s^2) M906 X1800 Y1800 Z1000 E600:600 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X500 Y500 Z500 S0 ; set axis maxima M574 X1 S1 P"!xstop" ; configure active-high endstop for low end on X via pin !xstop M574 Y1 S1 P"!ystop" ; configure active-high endstop for low end on Y via pin !ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z M574 Z2 S1 P"!zstop+!duex.e2stop+!duex.e3stop+!duex.e5stop" ; configure active-high endstop for high end on Z ; Z-Probe M558 P1 C"zprobe.in" H5 F120 T6000 ; set Z probe type to unmodulated and the dive height + speeds G31 P500 X5 Y29 Z0.551 ; set Z probe trigger value, offset and trigger height M557 X50:450 Y50:450 S40 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 A11 C99000 D2000 B1 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"spi.cs2" Y"thermocouple-max31856" ; configure sensor 1 as thermocouple via CS pin spi.cs1 M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S360 ; set temperature limit for heater 1 to 280C M308 S3 P"duex.e2temp" Y"thermistor" T10000 B3950 ; configure sensor 3 as thermistor on pin duex.e2temp M950 H3 C"e1heat" T3 ; create chamber heater output on duex.e2heat and map it to sensor 3 M307 H3 A11 C99000 D2000 B1 ; enable bang-bang mode for the chamber heater and set PWM limit M141 H3 ; map chamber to heater 3 ; Fans M950 F0 C"fan1" Q500 ; create fan 0 on pin fan1 and set its frequency M106 P0 C"WATER COOLING" S1 H1 T45 ; set fan 0 name and value. Thermostatic control is turned on M950 F1 C"duex.fan6" Q500 ; create fan 1 on pin duex.fan6 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"duex.fan7" Q500 ; create fan 2 on pin duex.fan7 and set its frequency M106 P2 S1 H1 T45 ; set fan 2 value. Thermostatic control is turned on ;Led-Indicators M950 P6 C"duex.e2heat" Q500 ; Assign to P6 M950 P7 C"duex.e3heat" Q500 ; Assign to P7 M950 P8 C"duex.e4heat" Q500 ; Assign to P8 M950 P9 C"duex.e5heat" Q500 ; Assign to P9 M42 P6 S0; M42 P7 S0; M42 P8 S0; M42 P9 S0; ; Tools M563 P0 S"MAIN EXTRUDER " D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M563 P1 S"SECOND EXTRUDER" D1 H1 F0 ; define tool 1 G10 P1 X0 Y0 Z0 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M575 P1 S1 B57600 ; enable support for PanelDue M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss T0 ; select first tool -
@moe-adams9093 said in G29S1 not loading during print and G32 not leveling properly:
Bed compensation in use: mesh
So it is active.
If you put a piece of tape on the Z axis motor shafts or lead screw do you see it move during the first layer?
-
I took the bottom plate off to see if my Z motors are compensating and they do move but they move very slow so I don't know if there's an option where I can make my Zmotors to compensate equivalent with the same speed of the X&Y axis while printing
-
Your Z accelerations are very slow. M201 Z80 but the jerk is very high. M566 Z800. Try swapping those two values.
Such a high jerk is making the firmware think the z axis is able to keep up to rapid changes in z position, but it can't actually. So the z movement is probably lagging behind where it thinks it is.
-
Ok I will try to change these settings and see how’s it going to behavior. Thank you
-
How is the Z axis setup? What kind of speeds can we realistically expect from it?
-
the Zaxis runs by 4 gearbox motors belt-driven. Expecting 100mm high-quality print speed
-
Did swapping those values help?
-
Yes it did little bit I also ran a quick print test and the results not really promising. Looks like some vibration issues from the X&Y Im note sure if it’s my external driver or maybe my linear rail.



-
M566 X10000 Y10000
your jerk on the X and Y is insanely high. Try reduce that to 1000.