@Phaedrux I'm going to drive on top of it and see if that will make it flat
Best posts made by moe.adams9093
-
RE: G29S1 not loading during print and G32 not leveling properlyposted in IR Height Sensor
-
RE: CNC Setup Duet 3D 6XD Controller Boardposted in CNC
@fcwilt Thank you, for all your help.
I did figure it out I was using the old configurator tool for the 3.5 firmware, and I didn't know that Reprap has a new configurator tool after I did a new config setup the motors are working fine now these are just testing motors next step is going with the 1 HCL + Moons Nema 24 with the incremental encoder so hopefully that goes smooth.
-
Multiple Z probes and multiple Z axis for IDEXposted in Firmware wishlist
Hello I have a question regarding Z probes for bed mesh compensation. I’m building new printer with dual extrusion IDEX can I have 2 Z probes installed one for each extruder and both extruders can compensate at the same time while printing. My Bed is controlled with 4 Z axis motors. Thank you
-
RE: G32 ERRORposted in Duet Hardware and wiring
Yeah I'm going to try 3.3 and do duex.e2stop all the way to duex.e6stop and see how its going to behave
-
RE: G32 ERRORposted in Duet Hardware and wiring
I just found a solution to this problem. and it's a very simple fix. All I have to do is swap Driver 9 and Duex.e6stop to Z Drive and !Zstop that will put my string under 50 Char. But first I need to go back to 3.1.1 because 3.3 is acting a little weird.
Latest posts made by moe.adams9093
-
RE: Duet 6XD output not initiatingposted in CNC
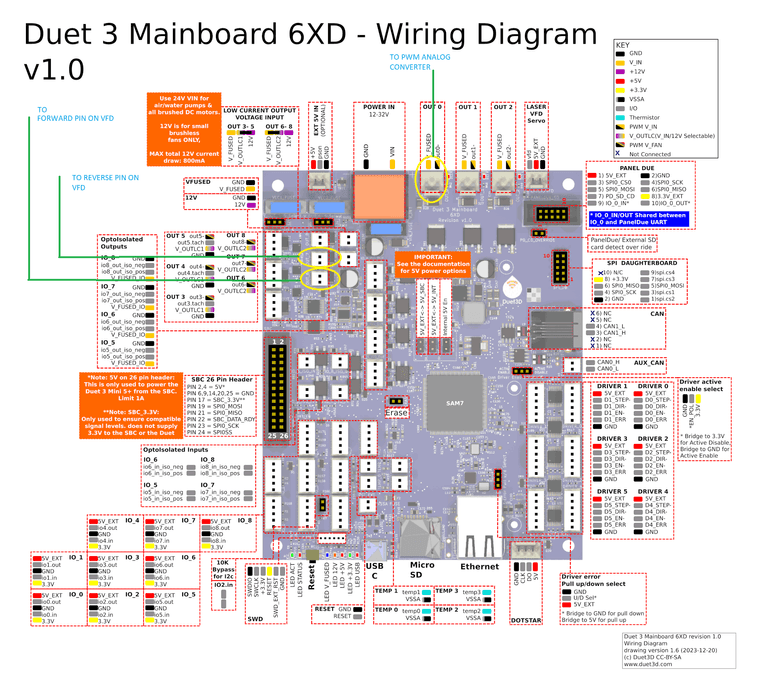
Thank you for the response and sharing your config Im using HY VFD i have a relay board that control the Revers pin and Forward pin basically my setup is out0 for PWM it goes to a PWM -analog converter and out 6 it goes to the relay for forward ,out7 it goes to reverse relay the problem im having that Output 6 and 7 not working they don't send voltage to activate relay I don’t know if its a problem with my 6XD or my pin name incorrect. Thats the issue Im having.
Thank you
-
RE: Duet 6XD output not initiatingposted in CNC
When I send M98 P"config,g" that's what I get
5/28/2024, 11:31:39 PM: : Tool 0: spindle 0@0rpm 5/28/2024, 11:31:39 PM: M98 P"config.g"So basically Im not getting any error at this point
-
Duet 6XD output not initiatingposted in CNC
Hello,
I'm building a CNC router using a Duet 6XD board. I am currently trying to wire a VFD to control the spindle.
my current code is
; Spindles M950 R0 C"out0+out6+out7" Q500 L100:24000 ; configure spindle #0 ; Tools M563 P0 S"Spindel0" R0 ; create tool #0 M568 P0 R0 M453; select CNC modewhen I turn on the spindle from DWC and set RPM to 1000 pin OUT0, it lights up but out6+out7 does not send any voltage to initiate a relay I'm not sure if there is a problem with my code or using the pin names incorrectly I placed a voltmeter on pins Out6&Out7 when I set spindle in reverse or forward I get no voltage.
thank you
m122 === Diagnostics === RepRapFirmware for Duet 3 MB6XD version 3.5.1 (2024-04-19 14:39:48) running on Duet 3 MB6XD v1.0 (SBC mode) Board ID: 08DLM-956DA-M2NS4-6JKD6-3S86T-1B32S Used output buffers: 1 of 40 (17 max) === RTOS === Static ram: 153624 Dynamic ram: 85396 of which 0 recycled Never used RAM 106972, free system stack 214 words Tasks: SBC(2,ready,0.6%,463) HEAT(3,nWait 6,0.0%,368) Move(4,nWait 6,0.0%,335) CanReceiv(6,nWait 1,0.0%,940) CanSender(5,nWait 7,0.0%,334) CanClock(7,delaying,0.0%,339) MAIN(2,running,99.3%,128) IDLE(0,ready,0.1%,30), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 00:04:26 ago, cause: software Last software reset at 2024-05-29 05:13, reason: User, Gcodes spinning, available RAM 106972, slot 0 Software reset code 0x6003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 43.3, current 43.7, max 43.9 Supply voltage: min 24.9, current 24.9, max 24.9, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0 Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: ok Driver 1: ok Driver 2: ok Driver 3: ok Driver 4: ok Driver 5: ok Date/time: 2024-05-29 05:17:30 Slowest loop: 1.18ms; fastest: 0.06ms === Storage === Free file entries: 20 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP* is doing "M122" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000000 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 1333, received 0, lost 0, errs 1254251, boc 0 Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 1333/0/0 Tx timeouts 0,0,1332,0,0,0 last cancelled message type 30 dest 127 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 10262/10262 SPI underruns 0, overruns 0 State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x25e00 Buffer RX/TX: 0/0-0, open files: 0 === Duet Control Server === Duet Control Server version 3.5.1 (2024-04-19 16:20:35, 32-bit) HTTP+Executed: > Executing M122 Code buffer space: 4096 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0 Full transfers per second: 39.45, max time between full transfers: 42.1ms, max pin wait times: 41.4ms/6.1ms Codes per second: 0.11 Maximum length of RX/TX data transfers: 4362/532; Configuration file for RepRapFirmware on Duet 3 Main Board 6XD ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.5.0 on Mon May 27 2024 23:55:03 GMT-0500 (Central Daylight Time) ; General G90 ; absolute coordinates M83 ; relative extruder moves M550 P"duet3" ; set hostname ; Accessories M575 P1 S0 B57600 ; configure PanelDue support ; Wait a moment for the CAN expansion boards to become available G4 S2 ; External Drivers M569 P0.0 S1 R0 T5:5:2.5:2.5 ; driver 0.0 goes forwards and requires an active-low enable signal (Y axis) M569 P0.1 S1 R0 T5:5:2.5:2.5 ; driver 0.1 goes forwards and requires an active-low enable signal (Y axis) M569 P0.2 S1 R0 T5:5:10:0 ; driver 0.2 goes forwards and requires an active-low enable signal (Z axis) ; Axes M584 X0.3 Y0.0:0.1 Z0.2 ; set axis mapping M92 X160 Y160 Z320 ; configure steps per mm M208 X0:1500 Y0:1500 Z0:200 ; set minimum and maximum axis limits M566 X3000 Y3000 Z180 ; set maximum instantaneous speed changes (mm/min) M203 X6000 Y6000 Z180 ; set maximum speeds (mm/min) M201 X4000 Y500 Z20 ; set accelerations (mm/s^2) ; Kinematics M669 K0 ; configure Cartesian kinematics ; Probes ;M558 K0 P1 C"io6.in" H5 F120 T6000 ; configure analog probe via slot #0 ;G31 P500 X0 Y0 Z0.7 ; set Z probe trigger value, offset and trigger height ;M558 K1 P1 C"io7.in" H5 F120 T6000 ; configure analog probe via slot #1 ;G31 P500 X0 Y0 Z0.7 ; set Z probe trigger value, offset and trigger height ; Endstops M574 X1 P"!io5.in" S1 ; configure X axis endstop M574 Y1 P"!io2.in+!io3.in" S1 ; configure Y axis endstop M574 Z1 P"io4.in" S1 ; configure Z axis endstop ; Spindles M950 R0 C"out0+out6+out7" Q500 L100:24000 ; configure spindle #0 ; Tools M563 P0 S"Spindel0" R0 ; create tool #0 M568 P0 R0 M453; select CNC mode -
RE: No encoder specified for closed loop drive mode ERRORposted in CNC
@dc42I still have no movements on the closed loop even when I run m569
; Smart Drivers M569.1 P50.0 T2 C1000 H50 P30 I1000 D0.050 A150000 V400 E4:8; M569 P50.0 D4 S1 ; Configure the motor on the Duet 3 Expansion 1HCL controller at can address 50 as being in closed-loop drive mode (D4) and not reversed (S1)m569.1 P50.0 Encoder type: rotaryQuadrature Quadrature encoder pulses/rev: 1000.00 PID parameters P=40.0 I=2000.000 D=0.000 V=400.0 A=150000.0, torque constant 1.00Nm/A Warning/error threshold 4.00/8.00m569.0 P50.0 Driver 50.0 runs forwards, active low enable, mode direct (closed loop), ccr 0x08053, toff 3, tblank 1, thigh 200 (20.8 mm/sec), pos 8m122 B50 Diagnostics for board 50: Duet EXP1HCL rev 1.0a or earlier firmware version 3.5.0-rc.2 (2023-12-14 08:55:39) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 75704, free system stack 186 words Tasks: Move(3,nWait,0.0%,110) CLSend(3,nWait,0.0%,143) HEAT(2,nWait,0.0%,112) CanAsync(5,nWait,0.0%,67) CanRecv(3,nWait,0.0%,78) CanClock(5,nWait,0.0%,70) TMC(4,nWait,32.0%,347) MAIN(1,running,65.5%,375) IDLE(0,ready,0.1%,30) AIN(2,nWait,2.3%,265), total 100.0% Last reset 00:18:45 ago, cause: power up Last software reset data not available Driver 0: pos 8816, 180.0 steps/mm, not tuned/calibrated, SG min n/a, mspos 8, reads 33162, writes 37 timeouts 0, steps req 0 done 0 Moves scheduled 19, completed 19, in progress 0, hiccups 0, segs 6, step errors 0, maxLate 0 maxPrep 56, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0, ebfmin 0.00 max 0.00 Peak sync jitter -6/7, peak Rx sync delay 186, resyncs 0/0, next timer interrupt due in 29 ticks, enabled, next step interrupt due in 3450696376 ticks, disabled VIN voltage: min 48.5, current 48.5, max 48.6 V12 voltage: min 12.1, current 12.1, max 12.2 MCU temperature: min 24.0C, current 29.3C, max 29.5C Last sensors broadcast 0x00000000 found 0 143 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 11244, send timeouts 0, received 5709, lost 0, errs 0, boc 0, free buffers 38, min 38, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 317, adv 36896/37199 Closed loop driver 0 mode: closed loop, pre-error threshold: 4.00, error threshold: 8.00, encoder type rotaryQuadrature, position 1 Encoder reverse polarity: no, raw count 1 Tuning mode: 0, tuning error: 0x1, collecting data: no Control loop runtime (us): min=8, max=37, frequency (Hz): min=9146, max=19736 Accelerometer: none I2C bus errors 6, naks 0, contentions 0, other errors 0 even when I run a closed loop tuning doesn't respond or give accurate information and no movement.do you have any example codes or a document that can explain or give more details regarding the parameters?
Thanks
-
RE: No encoder specified for closed loop drive mode ERRORposted in CNC
@dc42 I have read the document few times I found it somewhat confusing specially with the parameters. I was able to get the error off after I installed and switched to the Duet magnetic encoder. I have D4 on M569 and T 3 M569.1.
Aduring tuning no motor movement but I can hear the motor is getting current. -
RE: No encoder specified for closed loop drive mode ERRORposted in CNC
the problem at first was on line 27
M569 P50.0 S1 D4; driver 50.0 goes forwards (X-axis)I removed the D4 value then the error went away, but now I have this error
12/23/2023, 1:03:31 PM Error: Encoder counts/rev must be at least two times steps/revhow can I overcome this step?
M122
m122 === Diagnostics === RepRapFirmware for Duet 3 MB6XD version 3.5.0-rc.2 (2023-12-14 10:33:00) running on Duet 3 MB6XD v1.0 (standalone mode) Board ID: 08DLM-956DA-M2NS4-6JKD6-3S86T-1B32S Used output buffers: 1 of 40 (19 max) Error in macro line 32 while starting up: Encoder counts/rev must be at least two times steps/rev === RTOS === Static ram: 153284 Dynamic ram: 117380 of which 0 recycled Never used RAM 72472, free system stack 204 words Tasks: NETWORK(1,ready,34.5%,182) ETHERNET(5,nWait,0.1%,325) HEAT(3,nWait,0.0%,369) Move(4,nWait,0.0%,340) CanReceiv(6,nWait,0.0%,797) CanSender(5,nWait,0.0%,334) CanClock(7,delaying,0.0%,343) MAIN(1,running,65.4%,128) IDLE(0,ready,0.0%,30), total 100.0% Owned mutexes: === Platform === Last reset 00:07:52 ago, cause: software Last software reset at 2023-12-23 13:02, reason: User, Gcodes spinning, available RAM 72472, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 33.7, current 34.6, max 34.8 Supply voltage: min 24.9, current 24.9, max 25.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.2, under voltage events: 0 Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/68/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: ok Driver 1: ok Driver 2: ok Driver 3: ok Driver 4: ok Driver 5: ok Date/time: 2023-12-23 13:10:08 Slowest loop: 4.23ms; fastest: 0.07ms === Storage === Free file entries: 20 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 3.4ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000000 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 2388, received 3795, lost 0, errs 3923, boc 0 Longest wait 2ms for reply type 6041, peak Tx sync delay 13074, free buffers 50 (min 49), ts 2364/2359/0 Tx timeouts 0,0,4,0,0,0 last cancelled message type 30 dest 127 === Network === Slowest loop: 1.66ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = Interface state: active Error counts: 0 0 0 0 0 0 Socket states: 5 2 2 2 2 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0M122 B50
m122 B50 Diagnostics for board 50: Duet EXP1HCL rev 1.0a or earlier firmware version 3.5.0-rc.2 (2023-12-14 08:55:39) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 75936, free system stack 186 words Tasks: Move(3,nWait,0.0%,182) CLSend(3,nWait,0.0%,150) HEAT(2,nWait,0.0%,120) CanAsync(5,nWait,0.0%,67) CanRecv(3,nWait,0.0%,80) CanClock(5,nWait,0.0%,70) TMC(2,nWait,19.8%,359) MAIN(1,running,77.8%,385) IDLE(0,ready,0.2%,30) AIN(2,nWait,2.1%,265), total 100.0% Last reset 00:08:38 ago, cause: software Last software reset data not available Driver 0: pos 0, 80.0 steps/mm, standstill, SG min n/a, mspos 536, reads 51573, writes 27 timeouts 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, segs 0, step errors 0, maxLate 0 maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0, ebfmin 0.00 max 0.00 Peak sync jitter -4/7, peak Rx sync delay 184, resyncs 0/0, next timer interrupt due in 10 ticks, enabled, next step interrupt due in 3905818431 ticks, disabled VIN voltage: min 48.5, current 48.5, max 48.6 V12 voltage: min 12.1, current 12.1, max 12.2 MCU temperature: min 26.8C, current 26.9C, max 28.6C Last sensors broadcast 0x00000000 found 0 194 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 4186, send timeouts 0, received 2621, lost 0, errs 0, boc 0, free buffers 38, min 38, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Closed loop driver 0 mode: open loop, pre-error threshold: 2.00, error threshold: 4.00, encoder type none Accelerometer: none I2C bus errors 12, naks 0, contentions 0, other errors 0Config.g
; Configuration file for RepRapFirmware on Duet 3 Main Board 6XD ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.5.0-rc.2 on Fri Dec 22 2023 21:48:41 GMT-0600 (Central Standard Time) ; General M550 P"Duet 3-CNC" ; set hostname ; Accessories M575 P1 S0 B57600 ; configure PanelDue support ; Network M552 P0.0.0.0 S1 ; configure Ethernet adapter M586 P0 S1 ; configure HTTP ; Wait a moment for the CAN expansion boards to become available G4 S2 ; Motor Idle Current Reduction M906 I30 ; set motor current idle factor M84 S30 ; set motor current idle timeout ; External Drivers M569 P0.1 S1 R0 T5:5:10:0 ; driver 0.1 goes forwards and requires an active-low enable signal (Y axis) M569 P0.2 S1 R0 T5:5:10:0 ; driver 0.2 goes forwards and requires an active-low enable signal (Z axis) M569 P0.3 S1 R0 T5:5:10:0 ; driver 0.3 goes forwards and requires an active-low enable signal (Y axis) ; Smart Drivers M569 P50.0 S1 ; driver 50.0 goes forwards (X axis) ; Closed-Loop Drivers M569.1 P50.0 S200 R100 I0 D0 A100 T2 C5; driver 50.0 has a quadrature encoder with 5 CPS ; Axes M584 X50.0 Y0.1:0.3 Z0.2 ; set axis mapping M350 X16 Y16 Z16 I0 ; configure microstepping without interpolation M906 X3000 ; set axis driver currents M92 X80 Y80 Z400 ; configure steps per mm M208 X0:200 Y0:200 Z0:200 ; set minimum and maximum axis limits M566 X900 Y900 Z12 ; set maximum instantaneous speed changes (mm/min) M203 X6000 Y6000 Z180 ; set maximum speeds (mm/min) M201 X500 Y500 Z20 ; set accelerations (mm/s^2) ; Kinematics M669 K0 ; configure Cartesian kinematics ; Endstops M574 X1 P"!50.io0.in" S1 ; configure X axis endstop M574 Y1 P"io1.in+io2.in" S1 ; configure Y axis endstop M574 Z1 P"io3.in" S1 ; configure Z axis endstop ; Heaters M950 H1 C"out1" T1 ; create heater #1 M143 H1 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #1 M307 H1 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #1 ; Heated beds M140 P0 H0 ; configure heated bed #0 ; Spindles ;M950 C"io4.out+io2.out+io3.out" Q500 L60:10000 ; configure spindle #0 ; Fans M950 F0 C"out0" ; create fan #0 M106 P0 S0 L0 X1 B0.1 ; configure fan #0 ; Tools ;M563 P0 D0 H1 F0 ; create tool #0 ;M568 P0 R0 S0 ; set initial tool #0 active and standby temperatures to 0C ; Miscellaneous M453 ; select CNC mode -
No encoder specified for closed loop drive mode ERRORposted in CNC
Hello All,
I just upgraded my firmware to 3.5.0Cr2, I'm getting an error at the startup for my 1HCL Driver board running with a closed-loop system
with no movement at all. Error in macro line 29 while starting up: No encoder specified for closed-loop drive modeM122
m122 === Diagnostics === RepRapFirmware for Duet 3 MB6XD version 3.5.0-rc.2 (2023-12-14 10:33:00) running on Duet 3 MB6XD v1.0 (standalone mode) Board ID: 08DLM-956DA-M2NS4-6JKD6-3S86T-1B32S Used output buffers: 3 of 40 (19 max) Error in macro line 29 while starting up: No encoder specified for closed loop drive mode === RTOS === Static ram: 153284 Dynamic ram: 117380 of which 0 recycled Never used RAM 72472, free system stack 204 words Tasks: NETWORK(1,ready,34.2%,182) ETHERNET(5,nWait,0.1%,321) HEAT(3,nWait,0.0%,369) Move(4,nWait,0.0%,340) CanReceiv(6,nWait,0.0%,797) CanSender(5,nWait,0.0%,334) CanClock(7,delaying,0.0%,343) MAIN(1,running,65.6%,128) IDLE(0,ready,0.1%,30), total 100.0% Owned mutexes: === Platform === Last reset 00:03:50 ago, cause: software Last software reset at 2023-12-23 03:10, reason: User, Gcodes spinning, available RAM 75408, slot 0 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 34.5, current 34.8, max 35.0 Supply voltage: min 24.9, current 24.9, max 24.9, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.2, under voltage events: 0 Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/60/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: ok Driver 1: ok Driver 2: ok Driver 3: ok Driver 4: ok Driver 5: ok Date/time: 2023-12-23 03:14:19 Slowest loop: 11.57ms; fastest: 0.07ms === Storage === Free file entries: 20 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 3.7ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000000 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 1185, received 1873, lost 0, errs 949, boc 0 Longest wait 1ms for reply type 6018, peak Tx sync delay 1218, free buffers 50 (min 49), ts 1152/1150/0 Tx timeouts 0,0,1,0,0,0 last cancelled message type 30 dest 127 === Network === Slowest loop: 5.65ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = Interface state: active Error counts: 0 0 0 1 0 0 Socket states: 5 2 2 2 2 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0M122 B50
m122 B50 Diagnostics for board 50: Duet EXP1HCL rev 1.0a or earlier firmware version 3.5.0-rc.2 (2023-12-14 08:55:39) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 75936, free system stack 198 words Tasks: Move(3,nWait,0.0%,182) CLSend(3,nWait,0.0%,150) HEAT(2,nWait,0.0%,120) CanAsync(5,nWait,0.0%,67) CanRecv(3,nWait,0.0%,80) CanClock(5,nWait,0.0%,70) TMC(2,nWait,19.8%,359) MAIN(1,running,77.7%,413) IDLE(0,ready,0.4%,30) AIN(2,nWait,2.1%,265), total 100.0% Last reset 00:05:04 ago, cause: software Last software reset data not available Driver 0: pos 0, 80.0 steps/mm, standstill, SG min n/a, mspos 8, reads 56517, writes 32 timeouts 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, segs 0, step errors 0, maxLate 0 maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0, ebfmin 0.00 max 0.00 Peak sync jitter -7/5, peak Rx sync delay 185, resyncs 0/0, next timer interrupt due in 9 ticks, enabled, next step interrupt due in 4066589403 ticks, disabled VIN voltage: min 48.5, current 48.6, max 48.6 V12 voltage: min 12.1, current 12.1, max 12.2 MCU temperature: min 26.3C, current 26.3C, max 26.6C Last sensors broadcast 0x00000000 found 0 135 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 2480, send timeouts 0, received 1557, lost 0, errs 0, boc 0, free buffers 38, min 38, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Closed loop driver 0 mode: open loop, pre-error threshold: 2.00, error threshold: 4.00, encoder type none Accelerometer: none I2C bus errors 12, naks 0, contentions 0, other errors 0M98 P"config.g"
12/23/2023, 3:20:40 AM Error: No encoder specified for closed loop drive mode Error: Encoder counts/rev must be at least two times steps/rev Warning: Sensor number 1 has not been defined 12/23/2023, 3:20:39 AM M98 P"config.g" HTTP is enabled on port 80Config.g
; Configuration file for RepRapFirmware on Duet 3 Main Board 6XD ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.5.0-rc.2 on Fri Dec 22 2023 21:48:41 GMT-0600 (Central Standard Time) ; General M550 P"Duet 3-CNC" ; set hostname ; Accessories M575 P1 S0 B57600 ; configure PanelDue support ; Network M552 P0.0.0.0 S1 ; configure Ethernet adapter M586 P0 S1 ; configure HTTP ; Wait a moment for the CAN expansion boards to become available G4 S2 ; Motor Idle Current Reduction M906 I30 ; set motor current idle factor M84 S30 ; set motor current idle timeout ; External Drivers M569 P0.1 S1 R0 T5:5:10:0 ; driver 0.1 goes forwards and requires an active-low enable signal (Y axis) M569 P0.2 S1 R0 T5:5:10:0 ; driver 0.2 goes forwards and requires an active-low enable signal (Z axis) M569 P0.3 S1 R0 T5:5:10:0 ; driver 0.3 goes forwards and requires an active-low enable signal (Y axis) ; Smart Drivers M569 P50.0 S1 D4; driver 50.0 goes forwards (X axis) ; Closed-Loop Drivers M569.1 P50.0 T2 C5 I0 D0 ; driver 50.0 has a quadrature encoder with 5 CPS ; Axes M584 X50.0 Y0.1:0.3 Z0.2 ; set axis mapping M350 X16 Y16 Z16 I0 ; configure microstepping without interpolation M906 X3000 ; set axis driver currents M92 X80 Y80 Z400 ; configure steps per mm M208 X0:2000 Y0:200 Z0:200 ; set minimum and maximum axis limits M566 X900 Y900 Z12 ; set maximum instantaneous speed changes (mm/min) M203 X20000 Y6000 Z180 ; set maximum speeds (mm/min) M201 X500 Y500 Z20 ; set accelerations (mm/s^2) ; Kinematics M669 K0 ; configure Cartesian kinematics ; Endstops M574 X1 P"!50.io0.in" S1 ; configure X axis endstop M574 Y1 P"io1.in+io2.in" S1 ; configure Y axis endstop M574 Z1 P"io3.in" S1 ; configure Z axis endstop ; Heaters M950 H1 C"out1" T1 ; create heater #1 M143 H1 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #1 M307 H1 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #1 ; Heated beds M140 P0 H0 ; configure heated bed #0 ; Spindles ;M950 C"io4.out+io2.out+io3.out" Q500 L60:10000 ; configure spindle #0 ; Fans M950 F0 C"out0" ; create fan #0 M106 P0 S0 L0 X1 B0.1 ; configure fan #0 ; Tools ;M563 P0 D0 H1 F0 ; create tool #0 ;M568 P0 R0 S0 ; set initial tool #0 active and standby temperatures to 0C ; Miscellaneous M453 ; select CNC modeI ran M564 S0 H0
the only motor response is my external driver which is ( M569 P0.1 S1 R0 T5:5:10:0) when I remove the closed loop feature the stepper motor
does move under M564 S0H0 Command but it is very noisy like running it on Sh*ty driver.Thank you
-
RE: CNC Setup Duet 3D 6XD Controller Boardposted in CNC
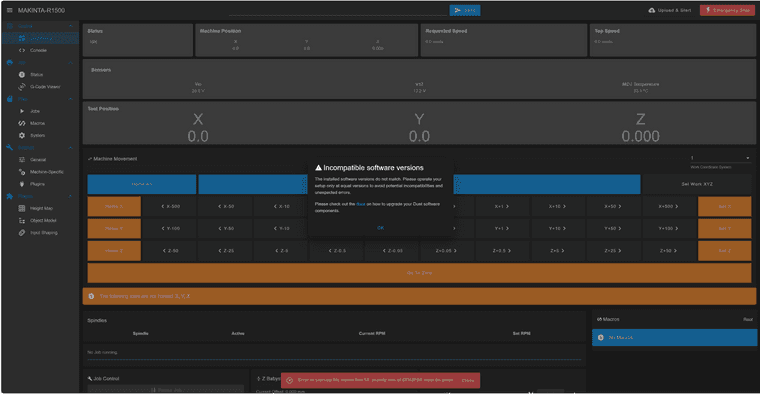
Sure, I do get some errors when I start up the duet controller I'm going to post some screenshots, as well as M122, M98, and Config.g.
M122
12/9/2023, 1:46:27 PM M122 === Diagnostics === RepRapFirmware for Duet 3 MB6XD version 3.5.0-rc.1 (2023-08-31 16:21:04) running on Duet 3 MB6XD v1.0 (standalone mode) Board ID: 08DLM-956DA-M2NS4-6JKD6-3S86T-1B32S Used output buffers: 1 of 40 (18 max) Error in macro line 54 while starting up: exactly one of EFHJPSR must be given === RTOS === Static ram: 153300 Dynamic ram: 117976 of which 0 recycled Never used RAM 71860, free system stack 210 words Tasks: NETWORK(1,ready,36.0%,182) ETHERNET(5,nWait,0.1%,317) HEAT(3,nWait,0.0%,340) Move(4,nWait,0.0%,339) CanReceiv(6,nWait,0.0%,941) CanSender(5,nWait,0.0%,335) CanClock(7,delaying,0.0%,344) MAIN(1,running,63.9%,162) IDLE(0,ready,0.0%,30), total 100.0% Owned mutexes: === Platform === Last reset 00:18:19 ago, cause: power up Last software reset at 2023-12-08 02:09, reason: User, Gcodes spinning, available RAM 71756, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 MCU temperature: min 16.9, current 35.3, max 35.4 Supply voltage: min 26.7, current 26.8, max 26.8, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.2, under voltage events: 0 Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/48/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: ok Driver 1: ok Driver 2: ok Driver 3: ok Driver 4: ok Driver 5: ok Date/time: 2023-12-09 13:46:25 Slowest loop: 4.30ms; fastest: 0.07ms === Storage === Free file entries: 20 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 3.5ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000000 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 5499, received 0, lost 0, boc 0 Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 5499/0/0 Tx timeouts 0,0,5498,0,0,0 last cancelled message type 30 dest 127 === Network === Slowest loop: 3.95ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = Interface state: active Error counts: 0 0 0 1 0 0 Socket states: 5 2 2 2 2 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0M98 P"config.g"
12/9/2023, 1:48:12 PM M98 P"config.g" HTTP is enabled on port 80 Warning: Sensor number 0 has not been defined Warning: Heater 0 predicted maximum temperature at full power is 321°C Warning: Sensor number 1 has not been defined Error: exactly one of EFHJPSR must be givenConfig.g
; Configuration file for RepRapFirmware on Duet 3 Main Board 6XD ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.5.0-rc.1 on Thu Dec 07 2023 21:03:57 GMT-0600 (Central Standard Time) ; General M550 P"MAKINTA-R1500" ; set hostname ; Network M552 P0.0.0.0 S1 ; configure Ethernet adapter M586 P0 S1 ; configure HTTP ; Motor Idle Current Reduction M906 I30 ; set motor current idle factor M84 S30 ; set motor current idle timeout ; External Drivers M569 P0.0 S1 R0 T5:5:10:0 ; driver 0.0 goes forwards and requires an active-low enable signal (X axis) M569 P0.1 S1 R0 T5:5:10:0 ; driver 0.1 goes forwards and requires an active-low enable signal (Y axis) M569 P0.2 S1 R0 T5:5:10:0 ; driver 0.2 goes forwards and requires an active-low enable signal (Y axis) M569 P0.3 S1 R0 T5:5:10:0 ; driver 0.3 goes forwards and requires an active-low enable signal (Z axis) ; Kinematics M669 K0 ; configure Cartesian kinematics ; Axes M584 X0.0 Y0.1:0.2 Z0.3 ; set axis mapping M350 X16 Y16 Z16 I0 ; configure microstepping without interpolation M92 X20 Y20 Z20 ; configure steps per mm M208 S1 X0 Y0 Z0 ; set axis minima M208 S0 X1500 Y1500 Z150 ; set axis maxima M566 X5000 Y5000 Z5000 ; set maximum instantaneous speed changes (mm/min) M203 X10000 Y10000 Z10000 ; set maximum speeds (mm/min) M201 X1000 Y1000 Z1000 ; set accelerations (mm/s^2) ; Endstops M574 X1 P"!io1.in" S1 ; configure X axis endstop M574 Y1 P"!io2.in+!io3.in" S1 ; configure Y axis endstop M574 Z1 P"!io4.in" S1 ; configure Z axis endstop ; Heaters M950 H0 C"out0" T0 ; create heater #0 M143 H0 P0 T0 C0 S140 A0 ; configure heater monitor #0 for heater #0 M307 H0 R2.43 D5.5 E1.35 K0.56 B1 ; configure model of heater #0 M950 H1 C"out1" T1 ; create heater #1 M143 H1 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #1 M307 H1 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #1 ; Heated beds M140 P0 H0 ; configure heated bed #0 ; Spindles M950 C"io4.out+pson+led" Q500 L60:10000 ; configure spindle #0 ; Miscellaneous M453 ; select CNC modeplease let me know how can I fix those errors.
Thank you
-
RE: CNC Setup Duet 3D 6XD Controller Boardposted in CNC
@fcwilt Thank you, for all your help.
I did figure it out I was using the old configurator tool for the 3.5 firmware, and I didn't know that Reprap has a new configurator tool after I did a new config setup the motors are working fine now these are just testing motors next step is going with the 1 HCL + Moons Nema 24 with the incremental encoder so hopefully that goes smooth.
-
RE: CNC Setup Duet 3D 6XD Controller Boardposted in CNC
I have done some tests first I removed the 1 HCL board CAN address from the config.g file the error is gone now, but still no movement after that I added timing input as @droftarts requested still no luck.
I still do get some errors on of them it says
Error in macro line 27 while starting up: in file macro line 27 column 27: M92: array too long, max length = 0Here's my new M122
m122 === Diagnostics === RepRapFirmware for Duet 3 MB6XD version 3.5.0-rc.1 (2023-08-31 16:21:04) running on Duet 3 MB6XD v1.0 (standalone mode) Board ID: 08DLM-956DA-M2NS4-6JKD6-3S86T-1B32S Used output buffers: 1 of 40 (19 max) Error in macro line 27 while starting up: in file macro line 27 column 27: M92: array too long, max length = 0 === RTOS === Static ram: 153300 Dynamic ram: 117888 of which 248 recycled Never used RAM 71556, free system stack 193 words Tasks: NETWORK(1,ready,34.4%,182) ETHERNET(5,nWait,0.1%,325) HEAT(3,nWait,0.0%,370) Move(4,nWait,0.0%,255) CanReceiv(6,nWait,0.0%,941) CanSender(5,nWait,0.0%,335) CanClock(7,delaying,0.0%,344) MAIN(1,running,65.4%,444) IDLE(0,ready,0.0%,30), total 100.0% Owned mutexes: === Platform === Last reset 00:03:32 ago, cause: software Last software reset at 2023-12-07 19:59, reason: User, Gcodes spinning, available RAM 71700, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 33.9, current 34.5, max 34.8 Supply voltage: min 26.7, current 26.8, max 26.8, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.2, under voltage events: 0 Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/80/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: ok Driver 1: ok Driver 2: ok Driver 3: ok Driver 4: ok Driver 5: ok Date/time: 2023-12-07 20:03:03 Slowest loop: 4.30ms; fastest: 0.07ms === Storage === Free file entries: 20 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 3.5ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 6, maxWait 80472ms, bed compensation in use: none, height map offset 0.000, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 25, completed 25, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 15], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000006 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 1061, received 0, lost 0, boc 0 Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 1061/0/0 Tx timeouts 0,0,1060,0,0,0 last cancelled message type 30 dest 127 === Network === Slowest loop: 1.54ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = Interface state: active Error counts: 0 0 0 0 0 0 Socket states: 5 2 2 2 2 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0in side M122 file under the Movement Locks
Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000006 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is emptyI don't know if there's an issue under this section causing this problem
I ran M121 and I get this error
m121 Error: Pop(): stack underflow on HTTPAlso, here's my most recent config.g file
; Configuration file for Duet 3 MB 6XD (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.16 on Sun Dec 03 2023 20:33:20 GMT-0600 (Central Standard Time) ; General preferences M575 P1 S1 B57600 ; enable support for PanelDue G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Makinta-R1500" ; set printer name ; Wait a moment for the CAN expansion boards to start G4 S2 ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S1 T5:5:10:10 ; physical drive 0.0 goes forwards M569 P0.2 S1 ; physical drive 0.2 goes forwards M569 P0.3 S1 ; physical drive 0.3 goes forwards M584 Y0.0 Z0.2 X0.3 ; set drive mapping M92 X80.00 Y80.00 Z80.00 E420.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X1500 Y1500 Z150 S0 ; set axis maxima ; Endstops M574 Y1 S1 P"io0.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io0.in M574 Z1 S1 P"io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin io1.in ; Z-Probe M558 P0 H5 F120 T12000 ; disable Z probe but set dive height, probe speed and travel speed M557 X15:215 Y15:195 S20 ; define mesh grid ; Heaters M140 H-1 ; disable heated bed (overrides default heater mapping) ; Fans M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency M106 P1 S1 H T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not definedhere's the current driver status
12/7/2023, 8:21:18 PM M569 P0.0 Drive 0 runs forwards, active high enable, timing 5.0:5.0:10.0:10.0us (actual 5.0:5.7:10.7:11.0us)M98
~~M98 P"config.g" HTTP is enabled on port 80 FTP is disabled TELNET is disabled Error: bad drive number Error: in file macro line 58: G10: Invalid tool number Error: in file macro line 59: G10: Invalid tool number~~thank you