"Down"grading from DuetWiFi to Maestro, EMF calculator question
-
@o_lampe zapta's analysis is right.
The back EMF from an inductive load is proportional to the rate of change of the current. The current in each phase oscillates on and off for each step, so for a higher current setting, the rate of change of the current is higher, hence you get a higher back EMF voltage.
For a higher current, you do get a higher torque from the motor, but at high speeds you also get the increased back EMF which lowers the torque. I don't know which factor wins for a given high speed, but I wouldn't be surprised if is the back EMF.
-
@o_lampe said in "Down"grading from DuetWiFi to Maestro, EMF calculator question:
I want to swap my duetWiFi with a Maestro. Thinking about the lower stepper current available, I asked the EMF calculator if I can keep my 2.4A steppers or if I better replace them with 1.7A steppers.
The outcome was puzzling. The torque of the 2.4A would drop earlier when at 2.0A than at 1.3A?That is expected. When there is sufficient driver voltage to achieve the requested current, you get the requested current, and the requested current determines the torque. At high speeds when there isn't enough driver voltage to achieve the requested current, the voltage defines the maximum current (and hence the torque), and the motors become noisy because the current waveform becomes clipped.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in "Down"grading from DuetWiFi to Maestro, EMF calculator question:
the motors become noisy because the current waveform becomes clipped
The current also get very distorted (normally they have sine/cosine shape).
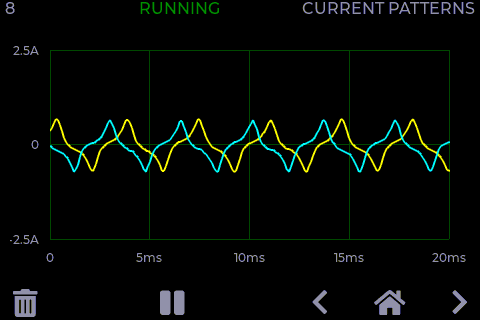
And the Lissajous curve is small and far from a circle:

The pictures above are from a Pololu Tic T500.
-
OK, thank you all. I have a better picture now.
That explains why both motors produce almost same numbers at 1.3A -
@dc42
I played around with the EMF calculator a bit more and I've noticed some oddities with the degrading torque caused by low slip angle
It doesn't make sense that it always starts degrading around 50% of the max. requested speed.
I keep all other motor parameters the same, just change the requested speed. And the torque degradation follows my "request"??In real life the torque of a current regulated motor starts degrading around 50% of the "no-load" speed. Which is determined by back-EMF is equal V-in according to your explanation.
So, instead of typing in a requested speed, the calculator should calculate max. speed based on EMF numbers and go on from there.
Am I right? -
@o_lampe said in "Down"grading from DuetWiFi to Maestro, EMF calculator question:
@dc42
I played around with the EMF calculator a bit more and I've noticed some oddities with the degrading torque caused by low slip angle
It doesn't make sense that it always starts degrading around 50% of the max. requested speed.
I keep all other motor parameters the same, just change the requested speed. And the torque degradation follows my "request"??In real life the torque of a current regulated motor starts degrading around 50% of the "no-load" speed. Which is determined by back-EMF is equal V-in according to your explanation.
So, instead of typing in a requested speed, the calculator should calculate max. speed based on EMF numbers and go on from there.
Am I right?Is anyone elso here, who can verify my observations and thoughts?
BTW: the transition to Maestro worked flawless. Now I have 2 more drivers (from the Maestro driver expansion board) and a 12864-LCD

-
@o_lampe said in "Down"grading from DuetWiFi to Maestro, EMF calculator question:
the degrading torque caused by low slip angle
It doesn't make sense that it always starts degrading around 50% of the max. requested speed.I tried to reproduce by changing requested max speed and observing calculated low/high sleep speeds and the calculated results don't change, as expected.
-
@zapta
They must have changed something in the meantime. I can't reproduce the odd behaviour either.
Instead, I'm getting far better numbers for the small pancakes than before. That's called Win-Win
-
Huh - the more you know.
I didn't know why my motors were noisy, but that makes so much more sense!
-
@luke-slaboratory
Yes, sometimes less is more")