Are My Stepper Motors Holding Me Back?
-
Hi guys,
I am on a quest to keep pushing the quality of my prints up, and after my latest upgrade, I am left wondering if my stepper motors might be holding me back.
The machine is an Ultimaker Original, but heavily modified. Short belts are gone, with Nema 17's direct driving the shafts (flex plate couplers). Belts/pulleys are GT2. The belts are relatively short 606mm closed loops with good tension. Control is a Duet Maestro. Drivers are running in Spreadcycle.
The machine originally ran with crossed 6mm rods supporting the carriage. I designed a standardized test print to look at the machine's ringing characteristic. Basically, it is a series of square steps extruded, printed at a constant 80mm/s, with XY acceleration varied from 100 - 3500 mm/s^2 on a per-layer basis. PA and DAA disabled.
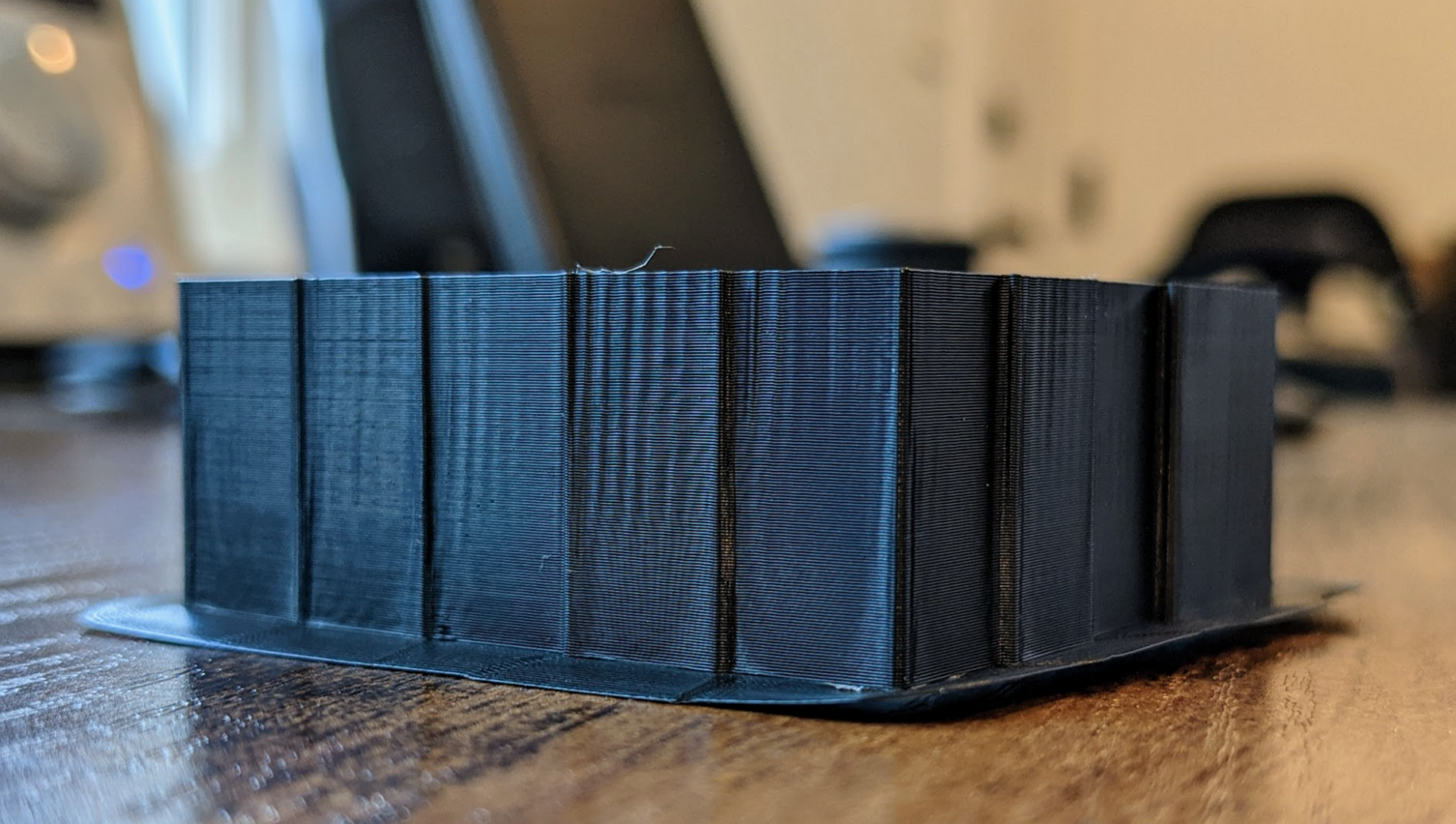
I recently redesigned to change out the 6mm rods for 8mm rods. Calculations showed a potential 70% reduction in deflection. But, even with Misumi 8mm linear bearings, I wasn't happy with the freeplay on the shafts leading to freeplay in nozzle position. It still gave me a benchmark result to compare ringing. It showed a slight improvement, but not as much as I had hoped.
Onward I went and redesigned again for 12mm linear rails. These are big time overkill for a printer of this size, but why not? They are incredibly stiff, and with zero freeplay, the nozzle position is beautifully repeatable. The linear rails run so much more smoothly and quietly:
Running my ringing test again, I see the same patterns emerging, slightly subdued, but still there. I am left with only two ideas of where this is coming from: some sort of electromechanical effect (stepper themselves, or driver tuning), or the belts. Here is a video showing the deflection effects of a simulated inertial load (with the 6mm rods). You can see that the XY block in the background doesn't visibly move, while the rods deflect significantly. This ruled out belt elasticity in my mind:
https://www.youtube.com/watch?v=aeZKwFTnFZQ
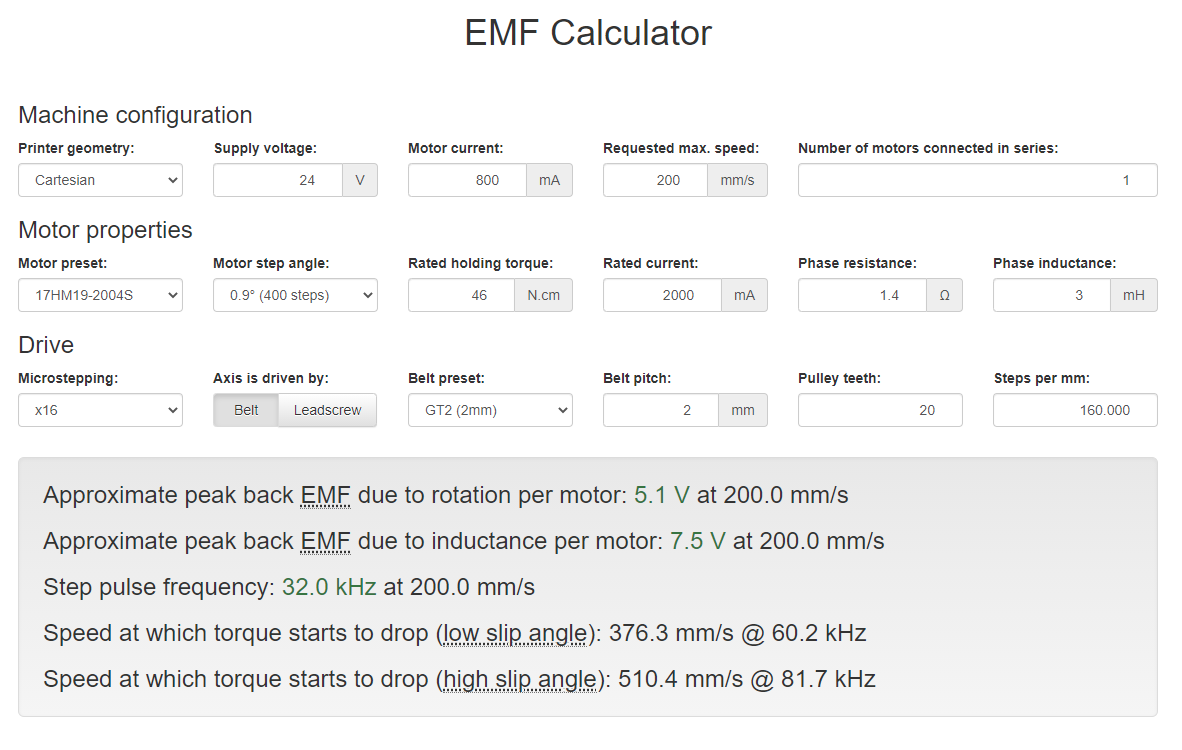
So, I'm left wondering if my stepper motors themselves are not ideal. They are 17HM19-2004S1 from Stepper Online
I am very much a mechanical guy, and while I have read the Duet guide to selecting steppers and other information, without throwing any red flags, I would love to hear opinions from actual stepper experts.
These are the values I get for the EMF calculator:
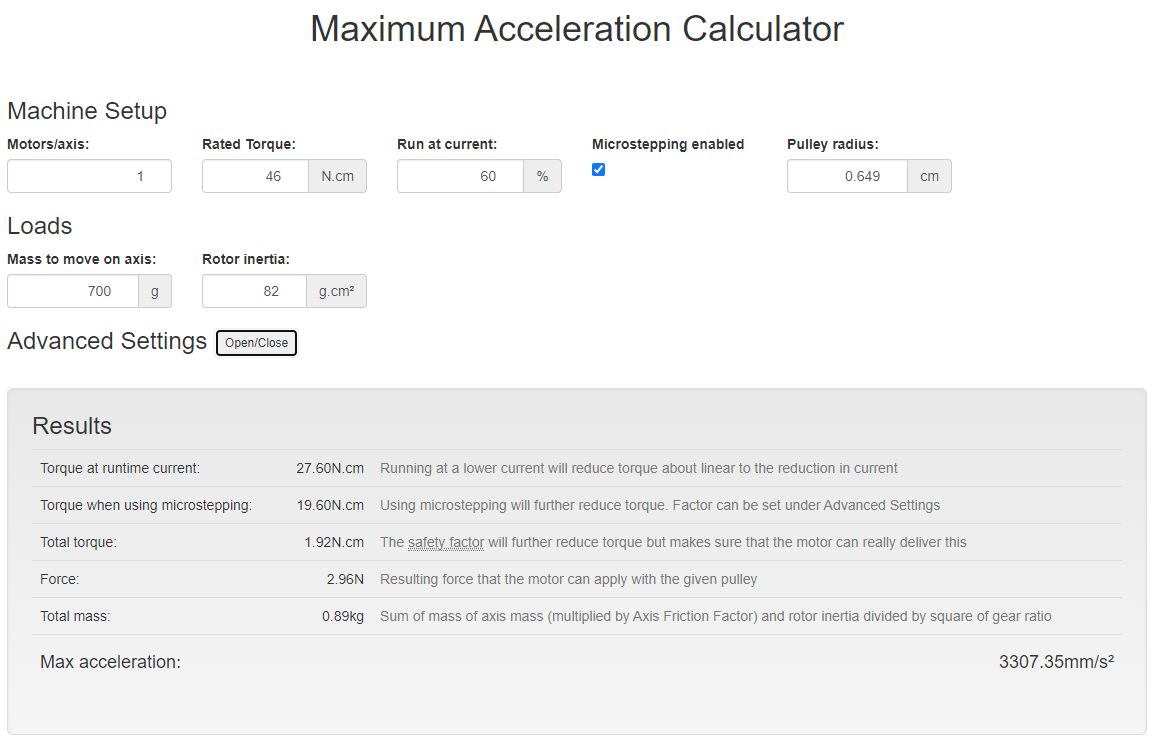
Max acceleration calculator seems low to me. My moving mass is somewhat of a rough guess at the moment:
Any insight is appreciated!
-
The motors themselves are magnetic springs basically, and there will always be some resonance in the frame.
Input shaping is the way forward. Monitor, measure, and profile the system and then adjust the input to eliminate the artifacts.
-
@phaedrux said in Are My Stepper Motors Holding Me Back?:
The motors themselves are magnetic springs basically, and there will always be some resonance in the frame.
Input shaping is the way forward. Monitor, measure, and profile the system and then adjust the input to eliminate the artifacts.
Definitely waiting with baited breath for input shaping. Any idea on the timeframe?
I have some genuine Gates belts on the way, just to try out, since the ones on there are years old and from Robotdigg (unknown mfg). The Ultimaker's wooden frame is pretty good about being less resonant.
-
-
@ccs86 said in Are My Stepper Motors Holding Me Back?:
The machine is an Ultimaker Original, but heavily modified. Short belts are gone, with Nema 17's direct driving the shafts (flex plate couplers).
Why do you expect that flex couplers will give better quality than short belt? IIRC they use the short loop to move motor away from the shaft to not pass on the motor issues to the shaft, it's rather good practice used on milling boxes too, there's no backlash in that belt and it should be more accurate than flex coupler too ?! I'm asking 'cause I never directly compared the two (usually where I had the direct drive there was no room for that test and where I had the short belt I never tried direct) so you should be able to compare the two after the modification
-
@arhi said in Are My Stepper Motors Holding Me Back?:
@ccs86 said in Are My Stepper Motors Holding Me Back?:
The machine is an Ultimaker Original, but heavily modified. Short belts are gone, with Nema 17's direct driving the shafts (flex plate couplers).
Why do you expect that flex couplers will give better quality than short belt? IIRC they use the short loop to move motor away from the shaft to not pass on the motor issues to the shaft, it's rather good practice used on milling boxes too, there's no backlash in that belt and it should be more accurate than flex coupler too ?! I'm asking 'cause I never directly compared the two (usually where I had the direct drive there was no room for that test and where I had the short belt I never tried direct) so you should be able to compare the two after the modification
The use of short belts is primarily to move the motors inside the enclosure, so they aren't sticking out the side and back like mine.
What "motor issues" do you expect that an additional belt mitigates?
Many printers directly drive pulleys/shafts, so it's nothing new. Hell, my giant 4 axis CNC mill turn machines use the exact same style couplers to mount enormous motors to the ballscrews and they can accurately click and reverse 0.0001".

In stock form, it used MXL belts, so there was a backlash issue, it creates more friction in the drive system and another belt to manage tension on.
-
@ccs86 said in Are My Stepper Motors Holding Me Back?:
Many printers directly drive pulleys/shafts, so it's nothing new. Hell, my giant 4 axis CNC mill turn machines use the exact same style couplers to mount enormous motors to the ballscrews and they can accurately click and reverse 0.0001".
mine too, all my printers and my 2 cnc mills, but for e.g. the "upgrade" for my mill (That was not cheap) moved the motors to not directly drive the ballscrew but to move the head and connect motor to shaft via belt