Homing works, but repeats endlessly (mostly)
-
Hello,
I am working on my second FDM printer to Duet conversion (Duet 3 6HC + rPi4 on a CR-10S). I am approaching a stable config, and I have encountered an odd behavior when homing axes. When, from the ready/idle state, I trigger an axis home from DWC dashboard, the machine behaves properly (move to endstop, bump, retreat, slow to endstop) in all cases for X and Y, but it then repeats the operation endlessly and the DWC button shows the circular/rotating "busy" icon. Sometimes I can get the DWC to return to a ready/idle state by clicking a move button (e.g. X+5) immediately after the physical home operation is complete. Otherwise homex.g is straight from the online configurator. The behavior is the same for homey.gI am running RFF 3.01-RC9 with DSF 3.2.2 and rPi 4. Has anybody else seen this issue?
-
@b3njam1n said in Homing works, but repeats endlessly (mostly):
I am running RFF 3.01-RC9 with DSF 3.2.2
You need to get your firmware in sync with DSF.
If it's not updating the firmware after sending sudo apt update and sudo apt upgrade on the Pi, then you'll need to manually trigger the update on the Duet, or use Bossa and USB connection to flash the firmware directly to 3.2.2.
This can sometimes occur when the Duet has a beta or release candidate firmware as you do.
You can try this method which places some potentially missing files on the duet and then uploads the firmware package.
https://duet3d.dozuki.com/Wiki/Getting_Started_With_Duet_3#Section_Updating_Duet_3_from_RRF3_0_Beta_12_to_3_0_Final_via_DWCOr if USB host option is easier for you either from windows or the pi itself.
-
@phaedrux
so I followed the directions you posted in reply to my question. The result seems to be that now my duet is not parsing config.g, and I have no axes, no heaters, no fans, and the machine is stuck in "starting" mode.Which build of raspbian should be running on the Pi? The file names for the D3 firmware updates you directed seem to indicate they are for boards versioned 0.6 through 1.0, but mine is stamped 1.01.
-
Which directions did you follow? There were 3 options presented.
Where do you see "starting" ?
The Pi should be running a Duet Pi image.
https://duet3d.dozuki.com/Wiki/Getting_Started_With_Duet_3#Section_Setting_up_the_Raspberry_Pi
-
@b3njam1n Check that your config.g isn't empty.
-
@stephen6309 -I should have mentioned that. It was empty after the directions, but I mean I have no axes, heaters, fans, after I restored the previous config.g. Good observation, btw. I am pretty certain it is related to the firmware issue.
-
@phaedrux running Duet Pi, just based on raspbian.
-
@phaedrux only the first set. I am starting the USB/Bosso track now. I will let you know presently. Thanks, b.
-
@b3njam1n Hi again. No luck with Bossa either via the Pi or from Windows via USB. It was getting a little frustrating, so I had to call it a night. The wiring is all in place, the limits function, the motors moved as expected, and it I guess I made the mistake of getting a bit excited-- thinking I was close to being ready to probe the bed and maybe do some test prints.
I had a lot more luck with my D2wifi a while back, and it seemed like the documentation was easier to follow. I really like the duet3d products I have used, but I am all at sea here. I can follow directions, but I can't seem to grasp which set of directions to follow. I think I need to start from square one again, and I would appreciate some help.
I am now getting messages from DWC (I think) saying I am trying to move a motor when Vin is out of range- but Vin is 12.1-12.3v and steady. None of the fans will turn at all. I don't feel like DWC is actually communicating with the D3.
Please help.
-
@b3njam1n one more note- when I tried to connect to the D3 from the rPi, it would not show up. It completed the flash from windows, and verified. Now I am at a stand.
-
This post is deleted! -
@phaedrux I think I have lost the power mosfet that provides regulated 12v to the board. I am only getting 3.3-3.6v on V12 according to DWC, and I am receiving an "attempting to move motor while Vin out of range" when I try to move a motor. That seems to be why the 12v fans stopped turning. The external PSU and the power it provides are unaffected, but this duet is probably out of action until I can replace that component. The board is genuine Duet3D, so the part is whatever is specified for a board marked v1.01. It is the mosfet clockwise of the shielded power strip. It says it is a 036N04L GAB830, and when I try to find a replacement at mouser.com it says there is a long lead time. Any chance you guys have one available?
-
What LEDs are lit on the board?
When and where did you purchase the Duet?
-
@phaedrux I bought it from filastruder. The three LEDs quite near the reset button are, anticlockwise from the corner, amber, red, green. The diagnostic LED us just flashing at about 1Hz- so normal, I think. Although you didn't ask me for it, here is the output of an M122:
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.2.2 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6J9F0-3S46P-9U2LD
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 149788
Dynamic ram: 62628 of which 0 recycled
Never used RAM 146416, free system stack 204 words
Tasks: Linux(ready,122) HEAT(blocked,297) CanReceiv(blocked,927) CanSender(blocked,371) CanClock(blocked,358) TMC(blocked,65) MAIN(running,1203) IDLE(ready,19)
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:14:15 ago, cause: power up
Last software reset time unknown, reason: MemoryProtectionFault mmarValid daccViol, FilamentSensors spinning, available RAM 148056, slot 2
Software reset code 0x416d HFSR 0x00000000 CFSR 0x00000082 ICSR 0x00400804 BFAR 0x00000017 SP 0x2041fc80 Task MAIN Freestk 1710 ok
Stack: 00000000 00000000 00000000 0000000d 00000100 00468f8b 00452558 61030000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 ffffffff 0000002c 0000001f 20429288 20429a08 00000001 00444b2b 0000000d 2041dbcc 2041b8e8 00452555 00000000
Error status: 0x00
Aux0 errors 0,0,0
Aux1 errors 0,0,0
MCU temperature: min 14.8, current 29.2, max 29.5
Supply voltage: min 12.2, current 12.2, max 12.3, under voltage events: 0, over voltage events: 0, power good: no
12V rail voltage: min 3.8, current 3.9, max 3.9, under voltage events: 0
Driver 0: position 0, ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 1: position 0, ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 2: position 0, ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 3: position 0, ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 4: position 0, ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Driver 5: position 0, ok, reads 0, writes 0 timeouts 0, SG min/max 0/0
Date/time: 2021-05-08 00:54:50
Slowest loop: 1.07ms; fastest: 0.04ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== CAN ===
Messages queued 3330, send timeouts 7607, received 0, lost 0, longest wait 0ms for reply type 0, free buffers 48
=== SBC interface ===
State: 1, failed transfers: 0
Last transfer: 0ms ago
RX/TX seq numbers: 29475/29475
SPI underruns 0, overruns 0
Number of disconnects: 0, IAP RAM available 0x2c8a8
Buffer RX/TX: 0/0-0
=== Duet Control Server ===
Duet Control Server v3.2.2
Code buffer space: 4096
Configured SPI speed: 8000000 Hz
Full transfers per second: 2.46
Maximum length of RX/TX data transfers: 3240/744 -
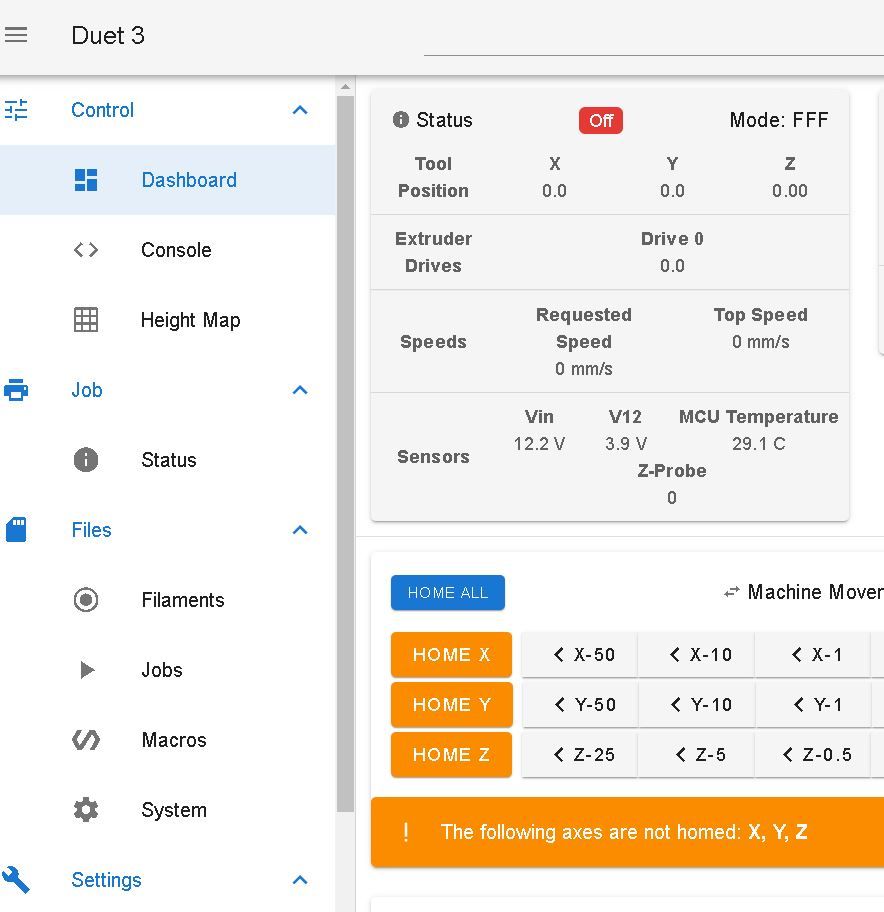
@phaedrux hold on, from the docs, it says " 12V will not be produced if only 12V is provided as VIN." -- perhaps I have not fried that mosfet. Is it normal for V12 to sit at around 3.9v if I am providing 12v to the board from a PSU? I would like to send a screenshot...
-
I'm not exactly sure what's going on. 12v VIN should be within range for the motors to move, so that error message is a little concerning. I've asked DC42 to take a look when he is able.
-
It was trying to home before but looping, and how you've got a VIN out of range error? What transpired immediately before that error?
-
@phaedrux I tried the three methods you shared trying to bring DSF in line with RFF on the duet3. First the missing files, and then the bossa flash of the board via USB- I tried from the Pi and it failed, so I flashed it with bossa from a windows box. It completed and verified.
-
And it looks like the firmware was properly applied and the pi is now in sync.
Can you show a photo of the board powered up showing the LEDs that are lit?
Is the Duet powering the Pi? or the Pi powering the Duet? Or are they independently powered?
-
@phaedrux sure just one sec- the Pi is powered by an official adafruit rPi power supply with an added "Pi switch" so I can power it off individually. Taking a pic, just a minute...
