Trinamic 5160 for Nema23 motor with 5A current phase
-
Hi everyone!
I would be grateful for your help in choosing motors for our new printer that we want to launch on Duet3D)
We assemble our printer on ready-made CCM belt-driven modules.
Can native mainboard drivers Trinamic 5160 (4.45A RMS, 6.3A peak) handle the 57CM3 Nema23 stepper motors? (specification below)

Thanks for support!
Best regards,
Oleksii -
@oleksii_solntsev
Hi there!Without knowing 1) whether or not that current is either RMS or Peak on your datasheet and 2) What kinematics it is, plugging those specs into the EMF calculator it looks like you're good to go for at least moderate speeds.
-
@luke-slaboratory
Hi dear Luke!Thank you so much!
We have parallel kinematics.
https://smartzavod.com/
Here is the landing page of our startup)And I tried to figure out all Parameters (like belt characteristics) and made the calculation.
but I definitely lack the expertise to understand the output and make any conclusion. Could you recommend a resource where I could read more about this?)
but if simple.
if we use our printer at speeds up to 400mm / s, then according to this calculation the driver should withstand?Thank you.
-
@oleksii_solntsev I think something is wrong with the input data. 15mm belt pitch does not make sense unless you are printing houses or other large structures.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I was thinking the same thing, that is a long-ass belt pitch.
-
Noob ?
Is the EMF Calculator something online? can I get link?
thanks!
`mike -
@gallaghersart
It's on the same page as the configurator tool, unfortunately it's not very well documented.
Although they've changed 'max. speed' to requested max. speed.
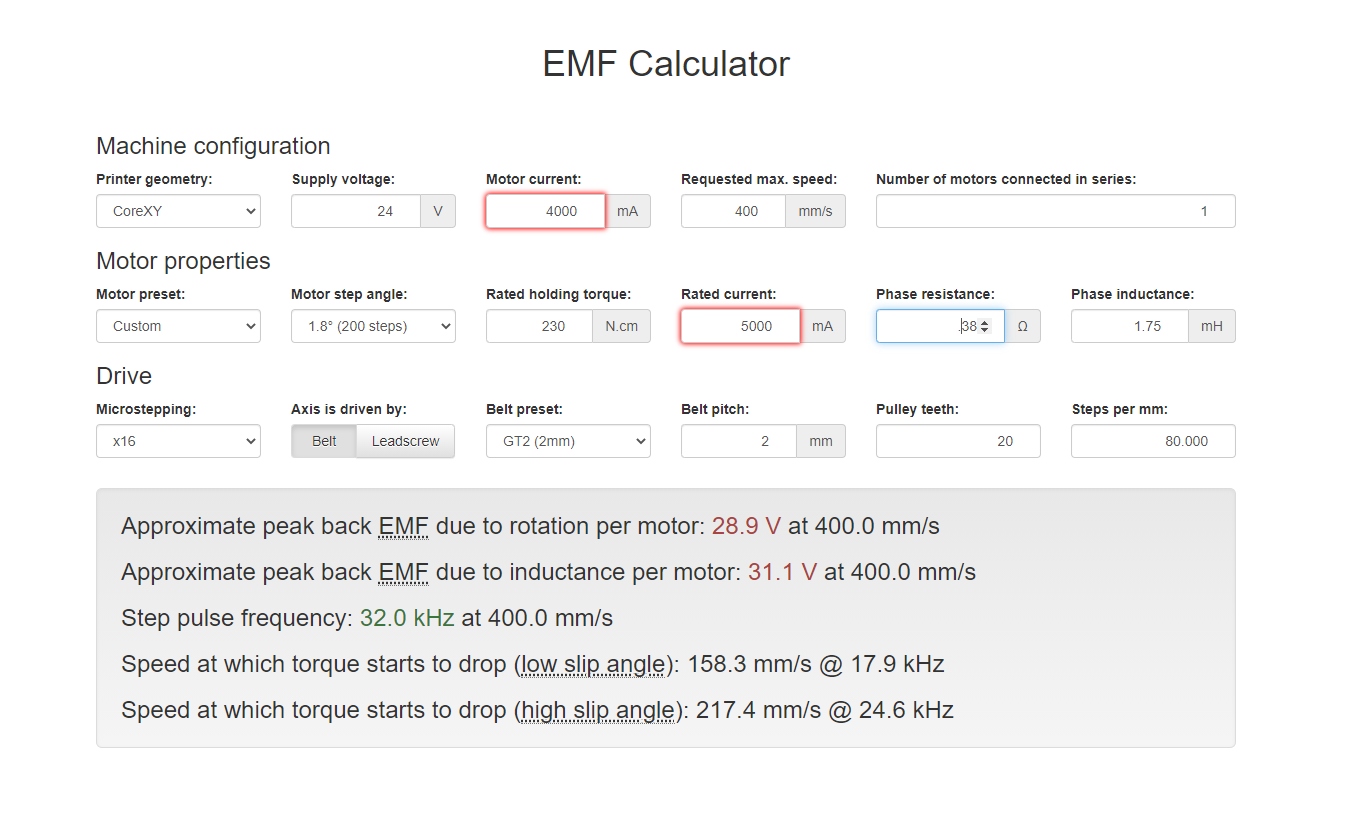
After filling in all known numbers, this value is the one to play with until the resulting back EMF values are close to the input voltage.
Then you can play with the motor current value and learn that more current means lower max. speed. A real eye opener! -
Yes. I definitely made a mistake.
We use HTD 3M 15 PU belt. And the EMF calculations looks so..

how can i interpret the results i got?
Thanks! -
I'd expect that you're going to have a good time printing, assuming you keep your top speeds below all of these numbers.
-
You've also selected x256 microstepping, which isn't reasonable or necessary. Stick to x16 and allow the drivers to internally interpolate to x256.
-
@luke-slaboratory said in Trinamic 5160 for Nema23 motor with 5A current phase:
I'd expect that you're going to have a good time printing,
Based on the EMF numbers, you are right. But a 3mm pitch/25 teeth pulley on a Nema23 motor wont run smooth enough for good prints.
That's only 42.67 steps/mm@16 microsteps@Oleksii_Solntsev
I'd try a smaller pulley, it will still be fast enough.
400mm/s isn't max. achievable speed, since the back-EMF is 4-5V below supply voltage. -
@phaedrux said in Trinamic 5160 for Nema23 motor with 5A current phase:
Stick to x16 and allow the drivers to internally interpolate to x256.
I thought, that Duet3 boards can interpolate on any microstep setting? What you suggested is true for Duet2 drivers, right?
-
@oleksii_solntsev said in Trinamic 5160 for Nema23 motor with 5A current phase:
We have parallel kinematics.
In that case you have to calculate steps/degree, which isn't available yet in the EMF calculator.
Right, @dc42 ? -
-
@o_lampe said in Trinamic 5160 for Nema23 motor with 5A current phase:
@oleksii_solntsev said in Trinamic 5160 for Nema23 motor with 5A current phase:
We have parallel kinematics.
In that case you have to calculate steps/degree, which isn't available yet in the EMF calculator.
Right, @dc42 ?I'm confused. Their landing page looks like they use Delta kinematics, but with towers at an angle??
-
@oleksii_solntsev you will need to calculate the maximum linear carriage speed that you need for your printer to achieve the desired XY speed. Our EMF calculator does that for regular delta printers, but not for your inclined tower kinematics.
One thing that worries me about your kinematics is that the Z resolution will vary with Z height, being (I think) worse at low heights and better higher up. Are you certain that you have sufficient Z resolution? Don't rely on microstepping to increase resolution, because microsteps are not necessarily uniform.