JMC Integrated Servo with Expansion Board 1XD is not working
-
Hey,
I am currently trying to get an integrated servo motor from JMC to run. I have an expansion board 1XD to control the motor. I have tested several configurations from the forum regarding pulse timing, but I have not been able to get the motor to run. As soon as I connect power, the motor has a holding current and can no longer be rotated. As soon as I give a signal to the axis assigned to the motor, the motor loses its holding current and the shaft can be rotated. This happens to all my tested configurations.
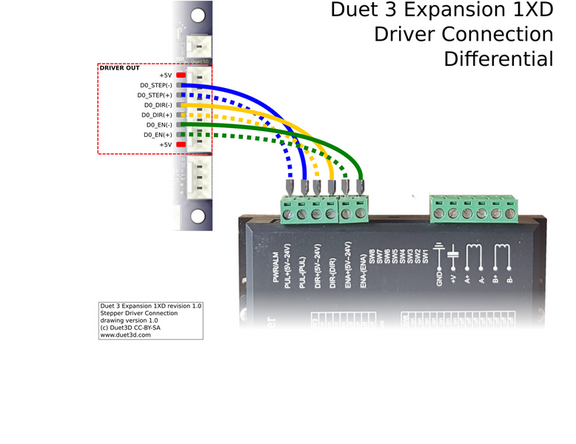
My Expansion Board 1XD is connected to the integrated Servo Motor by the following scheme:
This is my configuration in my system.g:
G4 S1; M552 P0.0.0.0 S1 M564 S0 H0 ; Enable Stepper Movment without homing M569 P9.0 S0 R1 T2.5:2.5:5:0 M584 X0.0 Y9.0I apreciate any kind of help or support.
-
@mamisc-hda swap the EN+ and EN- wires over. Some drivers use ENA as a driver enable signal, others use it as a disable signal. Alternatively, change R1 to R0 in the M569 command.
-
@mamisc-hda also changing the R value in M569 should work as well
-
@dc42 first of all I would like to thank you for your fast response.
I switched the R value to 0. The result was, that there was no hold current after I connected the system . After sending a signal there was the hold current. So as expected opposite of the R1 value.
Second I tried to switch the EN wires. Regardless of the R value, the motor had a constant current at all times.
I didnt mention which exact motor I have. Here is the name:
iHSV57-30-18-36-21-38 -
@mamisc-hda said in JMC Integrated Servo with Expansion Board 1XD is not working:
iHSV57-30-18-36-21-38
I have a couple of the Nema 17 variant of those motors to play with (which I'll be doing when I have the time).
You might find the information from @mrehorstdmd on his blog quite helpful https://drmrehorst.blogspot.com/2020/11/heres-what-happened-when-i-swapped.html
https://drmrehorst.blogspot.com/2020/04/the-spice-must-flow-gets-servo-motors.html -
@jay_s_uk Don't miss this page: https://drmrehorst.blogspot.com/2020/04/ihsv-servomotor-information.html
If anyone runs into anything I am missing, especially driver tuning info, please let me know so I can add it to the page.
-
I have an old external driver (Microstep R60 + Stepper) with which I have also tested the whole setup. When I connect the system to the power, the shaft of the motor is fixed by the holding current. If I change the R value, the system behaves the other way around. So just like with the integrated servo motor.
I conclude that it is not the servo but my wiring/expansion board.
This is the Result of the M122 command. In my perspective it looks ok.
M122 B9 Diagnostics for board 9: Duet EXP1XD firmware version 3.2.2 (2021-02-12) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) Never used RAM 5932, free system stack 94 words HEAT 90 CanAsync 89 CanRecv 83 MAIN 397 AIN 64 Last reset 00:09:25 ago, cause: software Last software reset data not available Driver 0: position 0, 80.0 steps/mm Moves scheduled 0, completed 0, in progress 0, hiccups 0 No step interrupt scheduled VIN: 24.4V MCU temperature: min 29.8C, current 30.4C, max 30.6C Ticks since heat task active 130, ADC conversions started 282561, completed 282561, timed out 0 Last sensors broadcast 0x00000000 found 0 134 ticks ago, loop time 0 CAN messages queued 18, send timeouts 0, received 2838, lost 0, free buffers 36 -
I fixed the issue. I connected an thermistor and it worked completely fine. First I thought my CAN Connection didnt have enough bandtwith because everything else worked fine except the motor.
The issue was that the 1XD Exp Board was running firmware 3.2 and the Mainboard was running firmware 3.3.