Brushless Servo using 1XD
-
I'm converting a Stratasys printer for work and my boss want to use the original motors.

For this I got handed these drives and duet 1XD boards
https://www.faulhaber.com/nl/producten/serie/sc-1801-s/
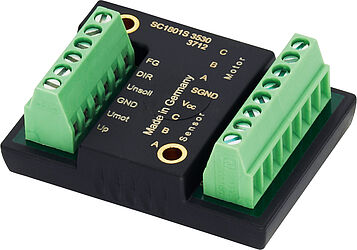
My question is how to correctly wire it, when I know how to wire it I should be able to figure out how to do the config.
Right now my boss has wired it like this:
5v - up
V+ - Umot
Gnd - V-
Unsoll - D0_step(+)
Dir - D0_steo (+) -
@verminsup unfortunately that driver doesn't appear to provide the facility to move to a specific position, only to set speed and direction.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 but hom am I supposed to set speed an direction? That might already be enough
-
@verminsup First, are you SURE those are BLDC motors?
I see a ribbon cable coming out of the encoder, and a two-wire connector coming out of the back of the motor, so I think they are DC motors with an incremental encoder.
Let's start there and see what you need for a motor-position controller after determining what kind of motor you have.
If you can post:
- What Stratasys machine you are trying to convert
- Links to any documents for that printer
- Close-up photographs of the motor connections
- Names, numbers or other markings on the motors you are trying to control
It would help a LOT.