Fly-super8 driver extension with BTT EXP-Mot V1.0
-
Hi gents,
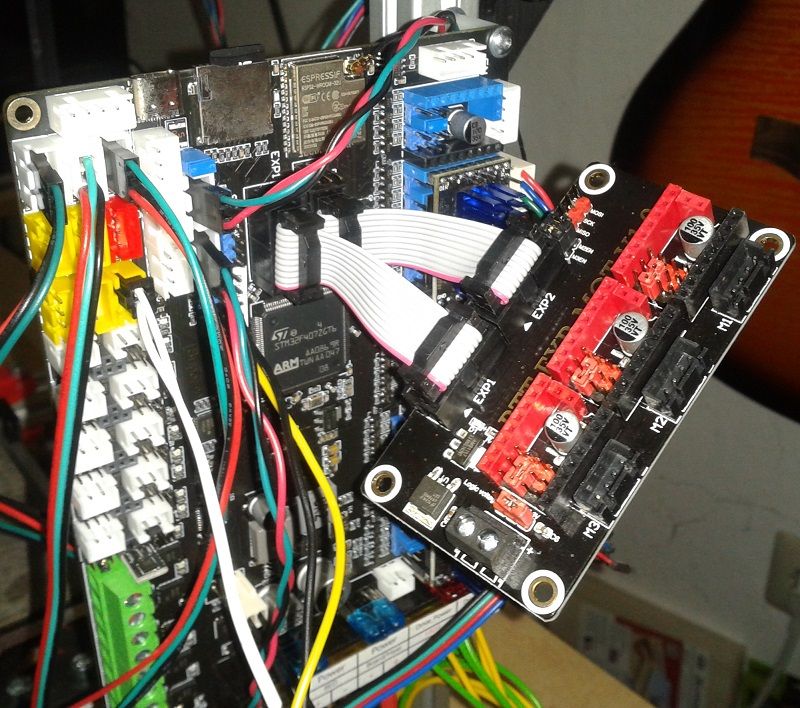
I've added a driver expansion board from bigtree tech to my super8 controller. The original ribbon cables are a bit short, but a little longer will do. It still looks akward and needs a propper mounting bracket. But it's a starting point.
With the help of @jay_s_uk I've also made a new board.txt which appends the driver signals including the UART pins for TMC22XX.
; Original stepper driver config of FLY-super8 ;stepper.enablePins = { F.11 F.14 G.1 E.9 F.2 C.15 G.4 G.7 NoPin NoPin NoPin } ;stepper.stepPins = { E.2 E.3 E.4 E.14 E.15 E.1 E.0 E.6 NoPin NoPin NoPin } ;stepper.directionPins = { C.5 F.13 G.0 E.8 E.11 F.0 G.3 G.6 NoPin NoPin NoPin } ;stepper.TmcUartPins = { C.4 F.12 F.15 E.7 E.10 F.1 G.2 G.5 NoPin NoPin NoPin } ;stepper.numSmartDrivers = 8 ; Expanded stepper driver config for BTT EXP-MOT V1.0 expansion board ; the new steppers are driver 8, 9, 10 stepper.enablePins = { F.11 F.14 G.1 E.9 F.2 C.15 G.4 G.7 G.15 G.13 G.14} stepper.stepPins = { E.2 E.3 E.4 E.14 E.15 E.1 E.0 E.6 A.7 B.7 A.6 } stepper.directionPins = { C.5 F.13 G.0 E.8 E.11 F.0 G.3 G.6 B.6 A.4 A.5 } stepper.TmcUartPins = { C.4 F.12 F.15 E.7 E.10 F.1 G.2 G.5 C.13 G.8 E.13 } stepper.numSmartDrivers = 11It's yet untested, so use it at your own risk.
@jay_s_uk If you see any mistakes, feel free to post it here
THX
Olaf//edit 19.10.21 The Exp-Mot jumper setting shown in the picture is wrong. I followed the BTT manual to find the right settings.
BTT EXP-MOT V1.0User Guide.pdf -
I didn't expand the Diag pins for stall detection/ sensorless homing, but they are there if needed.
Guess their array name is stepper.diagPins ?
-
That's crazy. I love it (-:
-
@oliof I like the ability to define extra stepper drivers by a simple text file in /sys folder.
AFAIK it's not possible with the RRF main branch, but maybe for a good reason?
I'll test them today. -
@o_lampe spot checking those they look good
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@o_lampe I think the LPC/STM port found the right balance between supporting versatile boards and not requiring recompiles with the board.txt approach.
-
@jay_s_uk I've added the stepper related lines to board.txt, but M122 P200 still shows:
== Configurable Board.txt Settings == board = fly_super8 Signature 0xd0c680ae leds.diagnostic = NoPin stepper.powerEnablePin = NoPin stepper.enablePins = { F.11 F.14 G.1 E.9 F.2 C.15 G.4 G.7 NoPin NoPin NoPin } stepper.stepPins = { E.2 E.3 E.4 E.14 E.15 E.1 E.0 E.6 NoPin NoPin NoPin } stepper.directionPins = { C.5 F.13 G.0 E.8 E.11 F.0 G.3 G.6 NoPin NoPin NoPin } stepper.digipotFactor = 0.00 stepper.TmcUartPins = { C.4 F.12 F.15 E.7 E.10 F.1 G.2 G.5 NoPin NoPin NoPin } stepper.numSmartDrivers = 11 stepper.num5160Drivers = 0 stepper.spiChannel = 255 stepper.TmcDiagPins = { NoPin NoPin NoPin NoPin NoPin NoPin NoPin NoPin NoPin NoPin NoPin }The board was reset and cold-started several times with no change.
What next? Via chat, if you like -
@o_lampe Add comma's between each pin
-
@jay_s_uk @jay_s_uk That helped recognizing the extra drivers.
I coupled the extra driver with the V-axis (V4:8) and it followed like a puppy
Check out driver 4 and 8, there is a difference I can't evaluate:
Driver 0: position -19800, 2209 standstill, reads 4591, writes 11, SG min/max not available Driver 1: position -19800, 2209 standstill, reads 4590, writes 11, SG min/max not available Driver 2: position 15920, 2209 standstill, reads 4590, writes 11, SG min/max not available Driver 3: position 19800, 2209 standstill, reads 4590, writes 11, SG min/max not available Driver 4: position 23800, 2209 standstill, reads 4586, writes 15, SG min/max 0/14 Driver 5: position 0, 2209 standstill, reads 4590, writes 11, SG min/max not available Driver 6: position 0, 2209 standstill, reads 4590, writes 11, SG min/max not available Driver 7: position 0, 2209 standstill, reads 4590, writes 11, SG min/max not available Driver 8: position 0, 2209 standstill, reads 4586, writes 15, SG min/max 0/438 Driver 9: position 0, no-driver-detected Driver 10: position 0, no-driver-detected -
@o_lampe said in Fly-super8 driver extension with BTT EXP-Mot V1.0:
Check out driver 4 and 8, there is a difference I can't evaluate:
What is it you are concerned about?
-
@gloomyandy ..I just don't kknow what SG min/max stands for and if the difference is a problem
-
@o_lampe Those are the TMC stall guard readings and will be dependant upon things like motor configuration, motor loading and how the motor has been moved. Are your driver 4 and 8 motors identical from this point of view?
-
@gloomyandy Thank's for explaining.
No the motors aren't identical, coupling drive 4 with the extra stepper was the fastest way to test it. It runs without anything attached. -
@o_lampe I think that will explain the difference, but it is hard to be 100% sure!
-
 undefined o_lampe referenced this topic
undefined o_lampe referenced this topic
-
@o_lampe Sorry for replying to this old post. But I have an octopus pro (429, with RRF) and I was wordering if I could do this same thing with it. Does anybody in the thread know?
If not, could I expand it somehow else? could I, for example, use the CAN interface to connect it to duet expansion boards or would that not be compatible?
Could I connect several different boards to a raspberry and make them communicate that way, perhaps (I know this is possible in klipper, but not sure about RRF).
Sorry again, perhaps I should start a new thread. -
@jtimon as I know the only boards that uses CAN-FD compatible with duet boards are skr 3, skr 3 ez and fly super 8, I might be wrong but Jay know for sure!
-
-
@jay_s_uk Thanks a lot.
Well, I was planning on using the EXP1 and EXP2 for a tft but if this is my only option for expansion, oh, well, I can use only the web interface, I guess, no big deal. Having an extra driver for the extruder is more important. Otherwise I could move to a 6 rope configuration from the current 8 rope configuration.
I would to CAD everything again, but I haven't started coding the new kynematics anyway.Thanks again, I was asking on reddit but not getting many answers:
https://www.reddit.com/r/3Dprinting/comments/wubt9g/is_the_octopus_board_compatible_with_any/
https://www.reddit.com/r/BIGTREETECH/comments/wuysen/how_can_i_expand_an_octopus_pro_429/
-
@jtimon I don't look at Reddit much. For the STM port of RRF you're best seeking support on our discord server https://discord.gg/uS97Qs7
And you can still use a screen using UART assuming the screen supports it -
undefined o_lampe referenced this topic
-
undefined o_lampe referenced this topic
-
undefined o_lampe referenced this topic
-
undefined o_lampe referenced this topic
-
undefined o_lampe referenced this topic
-
undefined o_lampe referenced this topic