How to configure the closed-loop motor on duet 2
-
Hi everyone, I am a new fan of duet. Just got a new duet 2 wifi motherboard. When I use an external closed-loop motor for X and Y axis, I ran into trouble. All my stepper settings are normal and it can move perfectly. Unfortunately, the print is slanted. I tried to use M569 to change the T parameter, but it didn't work. Does anyone know this problem?
Thanks in advance for any helpful suggestions.
-
@eaton-ren please post more details; at the very least Duet firmware version (send M115 to Duet, post response), config.g, specification sheet of external closed loop board, how you have wired it.
Ian
-
@droftarts
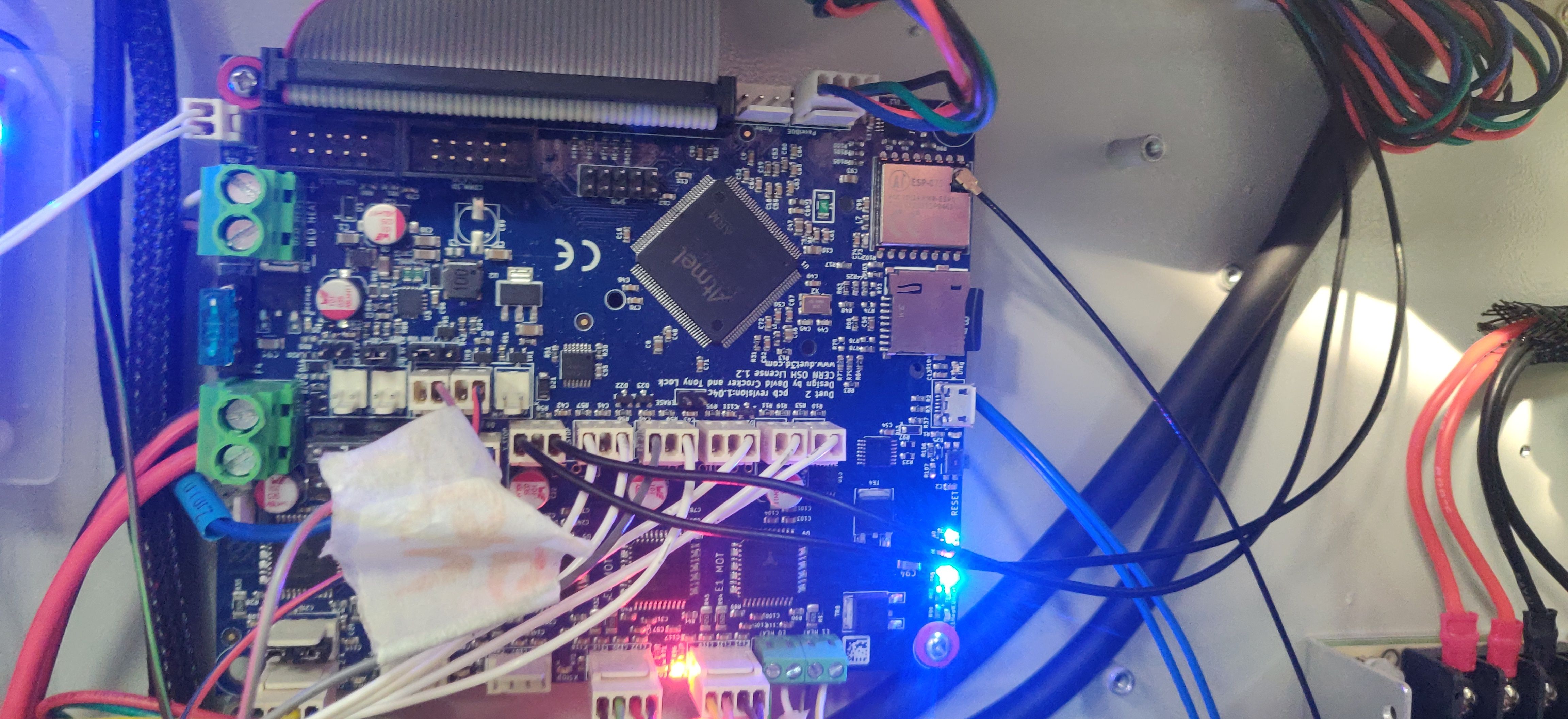
I completed all the information, thank you again for your reply.FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 3.3 ELECTRONICS: Duet WiFi 1.02 or later FIRMWARE_DATE: 2021-06-15 21:45:03
X uses E2 (DRIVE 5), Y uses E3 (DRIVE 6)
-
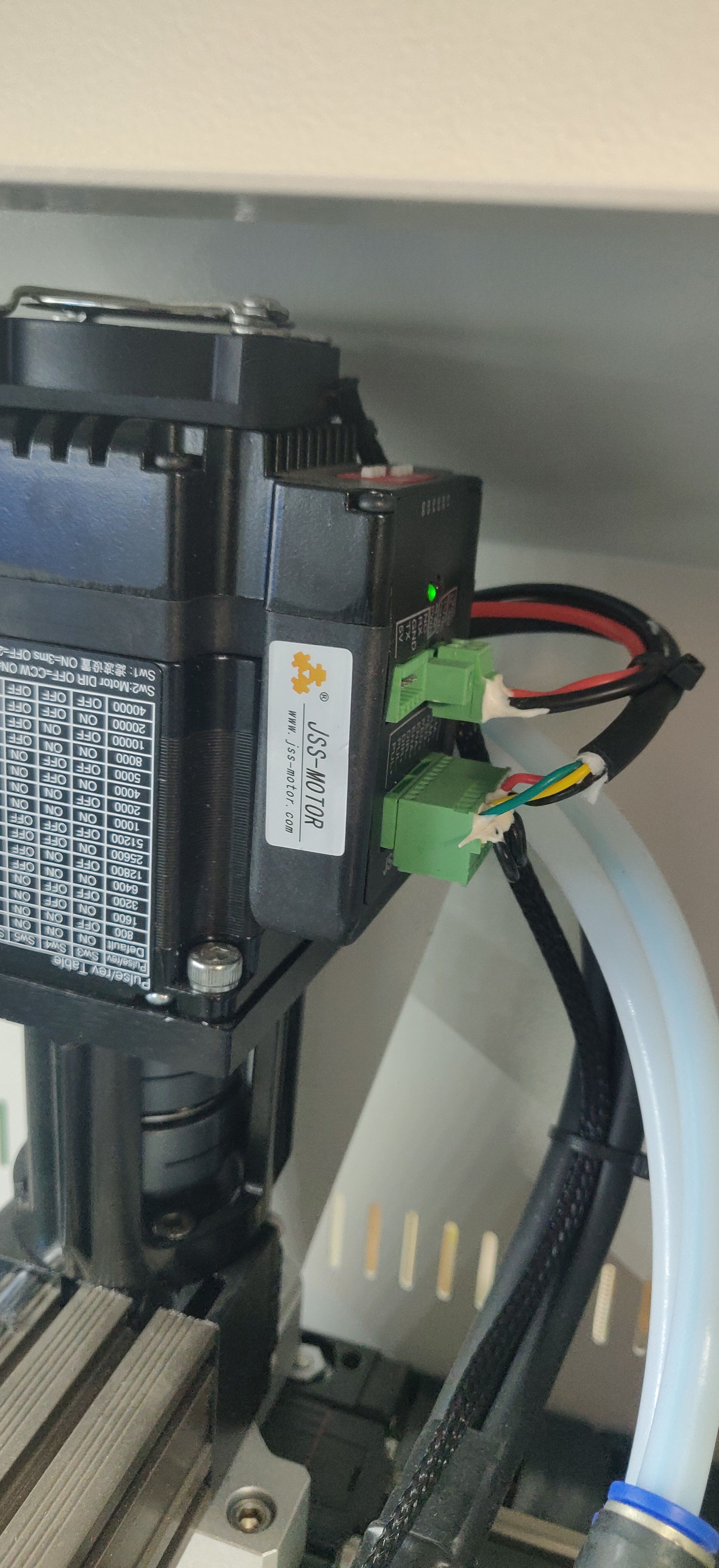
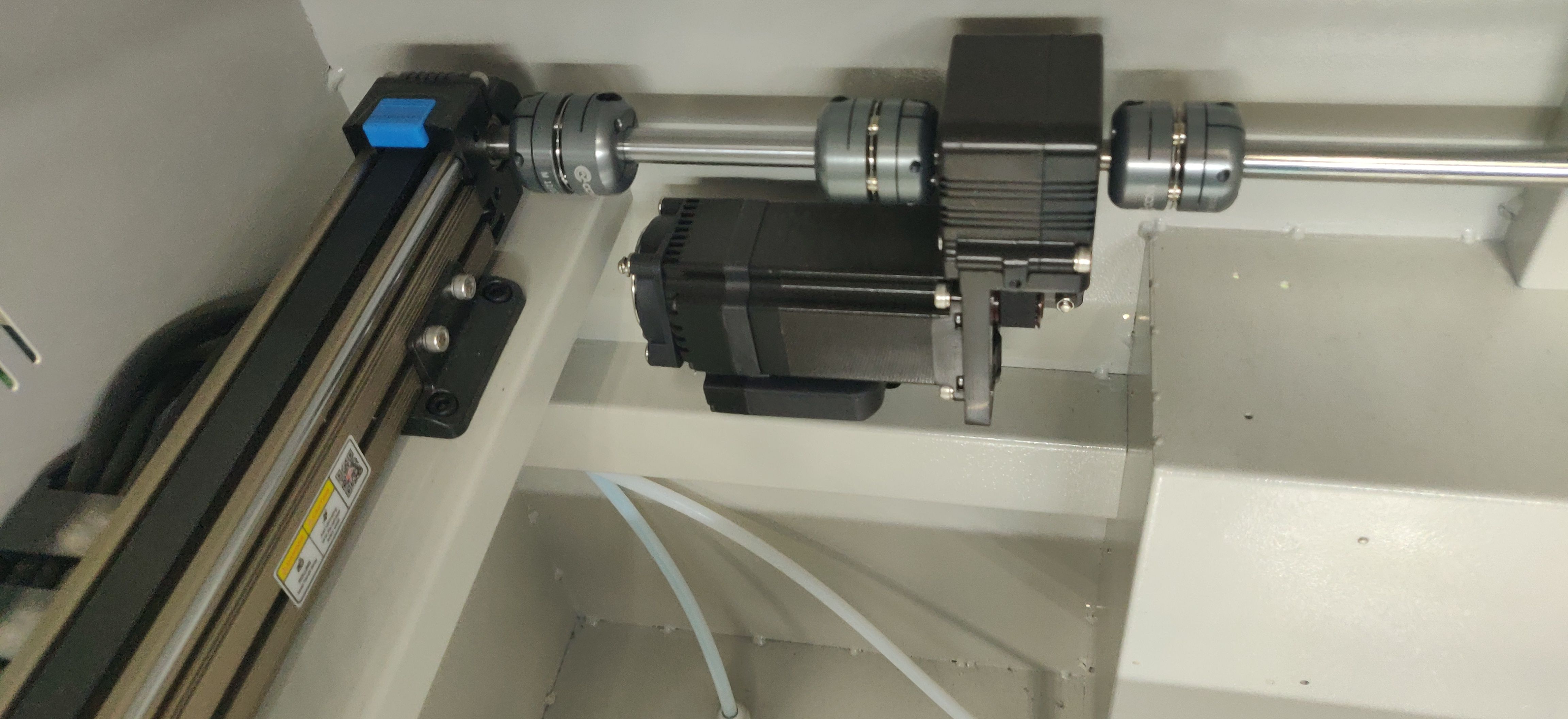
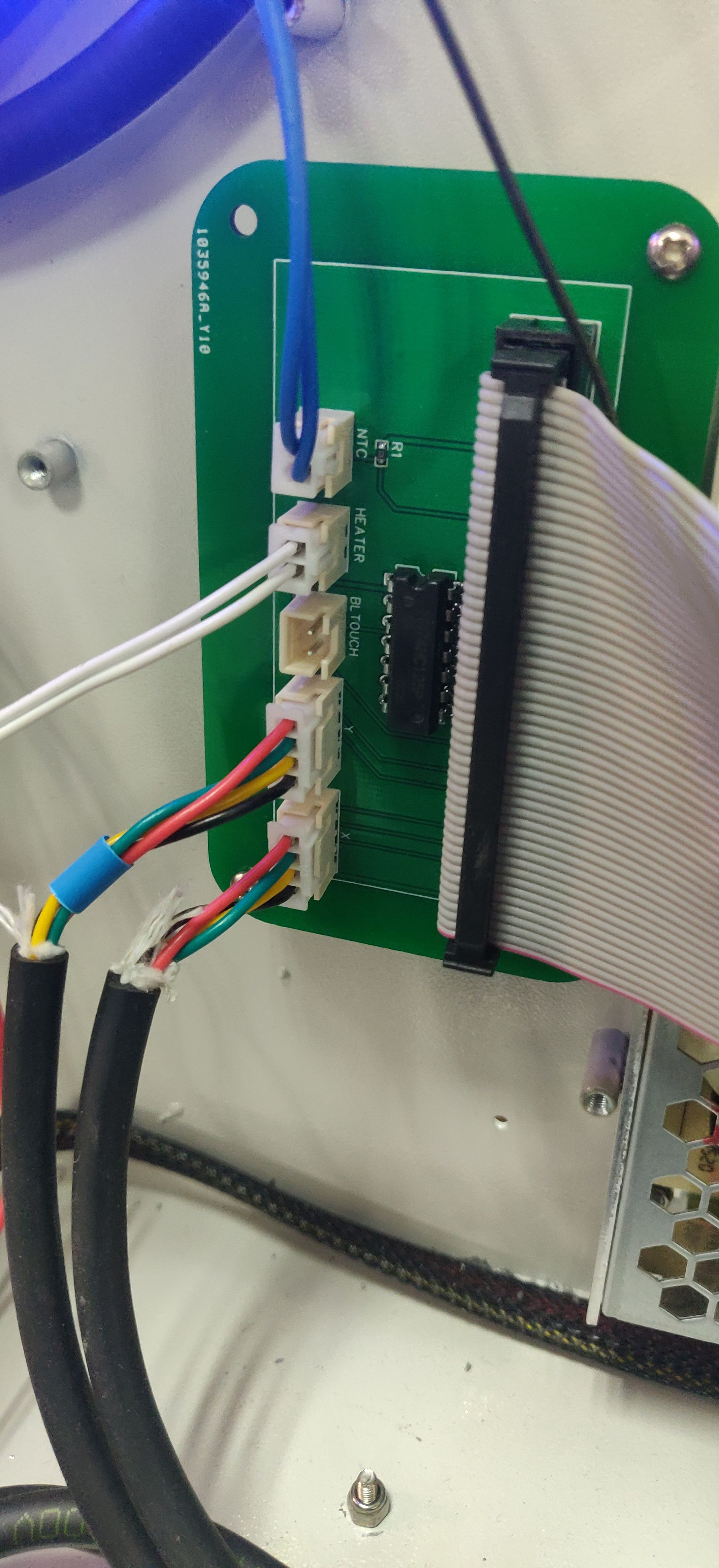
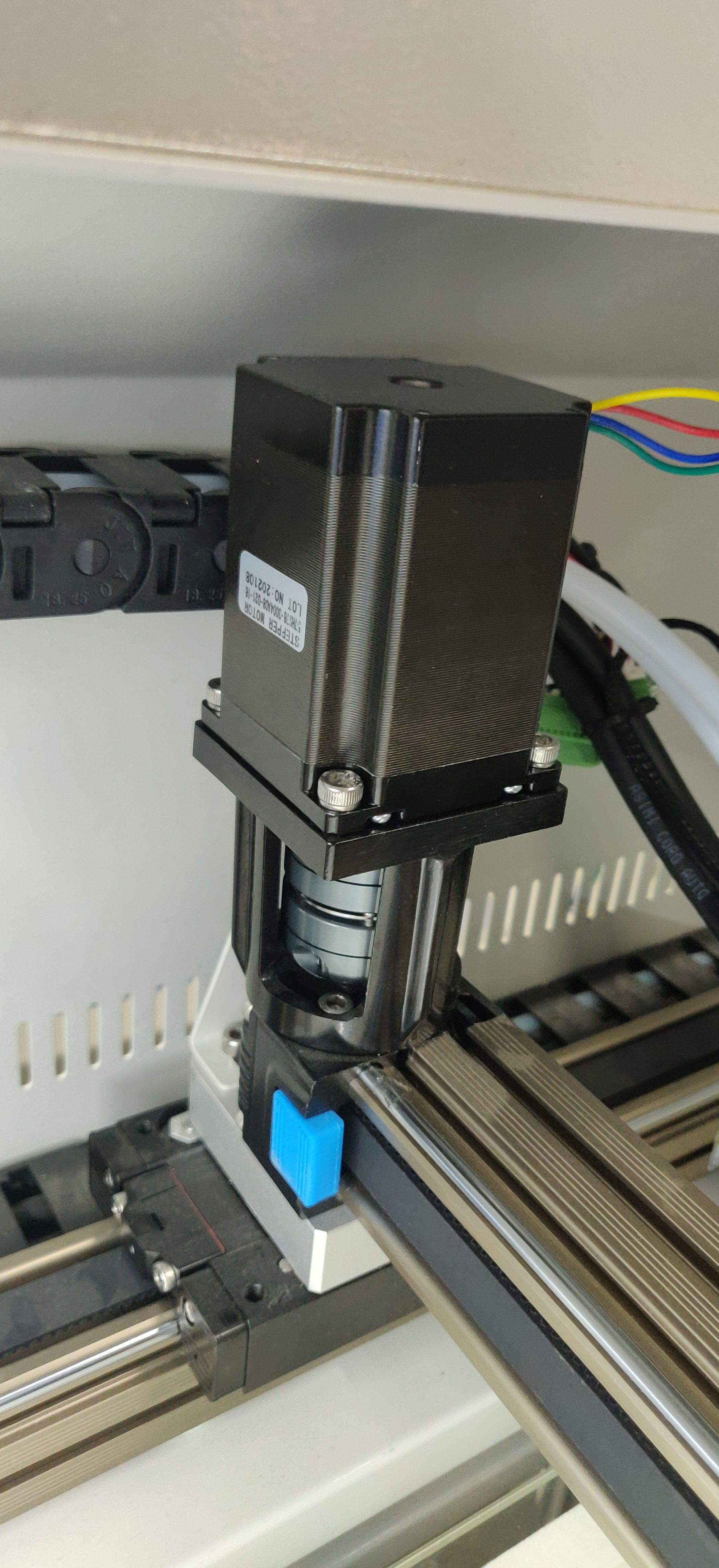
I added pictures of the wiring.
I designed an adapter board to facilitate the access of the motor signal line. The motor uses the common cathode connection method.
X motor subdivision value 8000
Y motor subdivision value 20000


-
Today I use an oscilloscope to observe the pulse signal. It is found that there will be a pulse signal 50ms after the DIR signal. 50ms is too long, I wonder if this is the problem.

-
@eaton-ren You have direction hold time set to zero- that's not likely to work.
I use iHSV servomotors in my sand table and have the timing set up like this:
M569 P5 S1 R0 T4.0:5.0:6.0:12.0 ; drive 5 reverse, lo enable, timing parameters for servomotors
M569 P6 S1 R0 T4.0:5.0:6.0:12.0 ; drive 6 reverse, lo enable, timing parameters for servomotorsI'd bet they're using similar or even identical drivers in your motors and mine.
I run these motors at 10k acceleration with speeds up to 1600 mm/sec with those timing parameters.
-
@mrehorstdmd Thanks for the help, I tried your T parameter and it didn't work. My client is very anxious, I can only use stepper motors. Today I changed them and used the default port. hope everything is fine.


-
@eaton-ren Maybe the problem is the voltage level on the step/dir/enable lines. I wired the step/dir/enable directly to the corresponding + and - step/dir/enable outputs on a Duet2 expansion board.

I did not use the alarm output...
-
@mrehorstdmd said in How to configure the closed-loop motor on duet 2:
I did not use the alarm output...
After replacing the stepper motors, they worked perfectly. Soon I can deliver two printers to customers.
I hope the TMC2660 drive is stable, because I saw a layer shift yesterday.

-
undefined Shoki referenced this topic 4 Nov 2022, 07:41