2 SD Cards - SBC - stop after pause.g 3.5beta2
-
@Phaedrux
m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.3 (2023-04-14 11:28:15) running on Duet 3 MB6HC v1.01 (SBC mode)
Board ID: 08DJM-956L2-G43S4-6J9D6-3S46P-KU42D
Used output buffers: 1 of 40 (17 max)
=== RTOS ===
Static ram: 154728
Dynamic ram: 85300 of which 0 recycled
Never used RAM 105580, free system stack 140 words
Tasks: SBC(ready,0.8%,402) HEAT(nWait,0.0%,326) Move(nWait,0.0%,243) CanReceiv(nWait,0.1%,770) CanSender(nWait,0.0%,334) CanClock(delaying,0.0%,341) TMC(nWait,7.2%,59) MAIN(running,91.8%,446) IDLE(ready,0.1%,30), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:44:20 ago, cause: software
Last software reset at 2023-04-14 20:56, reason: User, Gcodes spinning, available RAM 105884, slot 0
Software reset code 0x6003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a
Error status: 0x00
MCU temperature: min 31.1, current 32.5, max 33.2
Supply voltage: min 22.9, current 23.6, max 23.9, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.0, current 12.0, max 12.1, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 0, mspos 353, reads 45215, writes 17 timeouts 0
Driver 1: standstill, SG min 0, mspos 253, reads 45215, writes 17 timeouts 0
Driver 2: standstill, SG min 0, mspos 345, reads 45215, writes 17 timeouts 0
Driver 3: standstill, SG min 0, mspos 629, reads 45215, writes 17 timeouts 0
Driver 4: standstill, SG min n/a, mspos 8, reads 45221, writes 11 timeouts 0
Driver 5: standstill, SG min 0, mspos 440, reads 45211, writes 21 timeouts 0
Date/time: 2023-04-14 21:40:25
Slowest loop: 77.94ms; fastest: 0.04ms
=== Storage ===
Free file entries: 20
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 16, maxWait 2065783ms, bed compensation in use: mesh, comp offset 0.000
no step interrupt scheduled
=== DDARing 0 ===
Scheduled moves 151, completed 151, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 4], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Movement locks held by null, null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue* is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000007
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 24248, received 213113, lost 0, boc 2
Longest wait 14ms for reply type 6018, peak Tx sync delay 33779, free buffers 50 (min 46), ts 13304/13302/0
Tx timeouts 0,0,0,0,0,0
=== SBC interface ===
Transfer state: 5, failed transfers: 0, checksum errors: 0
RX/TX seq numbers: 36832/36832
SPI underruns 0, overruns 0
State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x26650
Buffer RX/TX: 0/0-0, open files: 0
=== Duet Control Server ===
Duet Control Server version 3.5.0-beta.3 (2023-04-14 15:12:26)
Code buffer space: 4096
Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0
Full transfers per second: 38.49, max time between full transfers: 122.2ms, max pin wait times: 50.7ms/4.1ms
Codes per second: 0.09
Maximum length of RX/TX data transfers: 4408/848
both commands, no infos

; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves; Drives ;closed loop
M569.1 P20.0 T2 C1000 E8:4 S200 R100 I0 D0.15 H60 ; Configure the 1HCL board at CAN address.20quadrature encoder 128 steps/motor full
M569.1 P21.0 T2 C1000 E8:4 S200 R100 I0 D0.15 H60 ; Configure the 1HCL board at CAN address.21quadrature encoder 128 steps/motor full step.
M569.1 P30.0 T2 C1000 E8:4 S200 R90 I0 D0.15 H60 ; Configure the 1HCL board at CAN address.21quadrature encoder 128 steps/motor full step.
M569 P20.0 D4 S0 ; Configure the motor on the 1HCL at can address 20 as being in closed-loop drive mode (D4) and not reversed (S1)
M569 P21.0 D4 S1 ; Configure the motor on the 1HCL at can address 21 as being in closed-loop drive mode (D4) and not reversed (S1)
M569 P30.0 D4 S1 ; Configure the motor on the 1HCL at can address 21 as being in closed-loop drive mode (D4) and not reversed (S1)Other drives; open loop;
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.2 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S1
M569 P0.5 S0
M569 P100.0 S0 ; physical drive 0.2 goes forwards
M569 P110.0 S0 ; physical drive 0.2 goes forwards
M584 X30.0 Y20.0:21.0 Z0.0:0.1:0.2:0.3 C0.5 E100.0:110.0 ; set drive mapping
M350 Z128 E16:16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z5120.00 C91.022 E400.00:690 ; set steps per mm
M566 X4000.00 Y4000.00 Z2000.00 C3000 E3000.00:3000.00 ; set maximum instantaneous speed changes (mm/min)
M203 X30000.00 Y30000.00 Z270.00 C10000 E24000.00:24000.00 ; set maximum speeds (mm/min)
M201 X3500.00 Y3000.00 Z2000.00 C400 E4000.00:4000.00 ; set accelerations (mm/s^2)
M906 X1800 Y1800 Z2300 C550 E800:1200 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S300 ; Set idle timeout
M671 X-100:-100:1180:1180 Y-100:1180:1180:-100 S20 ; leadscrews at front left1 and n´back2. back rigth3 and front4M915 P0.5 C S0 F0 R1
; Axis Limits
M208 X0 Y-100 Z0 S1 ; set axis minima
M208 X1000 Y1030 Z850 S0 ; set axis maxima; Endstops
M574 C1 S3
M574 X2 S1 P"^30.io1.in" ; configure active-high endstop for high end on X via pin ^io3.in
M574 Y2 S1 P"^20.io1.in+21.io1.in" ; configure active-high endstop for high end on Y via pin ^io1.in; Z probe
M558 P5 C"0.io1.in" H8 F2000 I0 T5000 ; Set Z probe type to switch, the axes for which it is used and the dive height + speeds
G31 P200 X5 Y30 Z0 ; Set Z probe trigger value, offset and trigger height; Z probe
M556 S50 X0 Y0 Z0 ; set orthogonal axis compensation parameters
M557 X50:800 Y50:800 S37.5 ; define mesh grid; Heaters
M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M140 H0
M307 H0 R0.468 K0.275:0.000 D19.70 E1.35 S1.00 B0 ; disable bang-bang mode for the bed heater and set PWM limit
M143 H0 S120M308 S1 P"100.temp0" Y"thermistor" T100000 B4138 ; configure sensor 1 as PT1000 on pin 121.temp0
M950 H1 C"100.out0" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B1 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S260M308 S2 P"110.temp0" Y"pt1000" T100000 B4138 ; configure sensor 2 as PT1000 on pin 121.temp0
M950 H2 C"2.out0" T2 ; create nozzle heater output on out1 and map it to sensor 2
M307 H2 R2.655 K0.412:0.000 D6.50 E1.35 S1.00 B0 ; disable bang-bang mode for heater and set PWM limit
M143 H2 S255 ; set temperature limit for heater 1 to 250C; Fans
M950 F0 C"100.out2" Q500 ; create fan 0 on pin 100.out1 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M563 P0 D0 H1 ; tool uses extruder 0, heater 1M950 F1 C"100.out1" Q500 ; create fan 1 on pin 100.out2 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on
M563 P0 D0 H1 F1 ; tool uses extruder 0, heater 1M950 F2 C"110.out2" Q500 ; create fan 2 on pin 101.out1 and set its frequency
M106 P2 S0 H-1 ; set fan 2 value. Thermostatic control is turned off
M563 P1 D1 H2 ; tool uses extruder 0, heater 2M950 F3 C"110.out1" Q500 ; create fan 3 on pin 101.out2 and set its frequency
M106 P3 S1 H2 T45 ; set fan 3 value. Thermostatic control is turned on
M563 P1 D1 H2 F2 ; tool uses extruder 1, heater 2; Magnete
M950 F8 C"20.out0" Q500 CMagnet0 ; create magnet 0 on pin out9 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F9 C"20.out1" Q500 CMagnet1 ; create magnet 0 on pin out9 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F10 C"21.out0" Q500 CMagnet2 ; create magnet 0 on pin out9 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F11 C"21.out1" Q500 CMagnet3 ; create magnet 0 on pin out9 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X-9 Y-39 Z-4.56 ; set initial tool 0 active and standby temperatures to 0C
G10 P0 R0 S0
M955 P100.00 I20M563 P1 D1 H2 F2 ; define tool 1 ; set initial tool 0 active and standby temperatures to 0C
G10 P1 X-76.9 Y-78.7 Z-21.8
G10 P1 R0 S0 -
 undefined Phaedrux moved this topic from Firmware installation
undefined Phaedrux moved this topic from Firmware installation
-
Are you able to make it halt consistently with a pause/resume? Next time that happens can you send M122 from the gcode console? Or is DWC completely unresponsive as well?
-
@Phaedrux
DWC is completely unresponsive.
Mostly it´s freezing directly, sometimes it´s just slower after resume till next layer/wall.I can try it 3 more times.
this time it stopped with first pause.
see short video -
@Phaedrux WhatsApp Video 2023-04-14 at 22.59.46 (1).mp4
May the speed before decides the behaviour. I´ll test it.
-
Can you send M122 B# where # is the canbus address of each of your expansion boards and copy and paste the results from each here?
-
@Phaedrux
just after restart?
or do I have to make moves or homing before? -
Any point is fine. I want to see that all the firmware versions are matching.
-
When DWC is unresponsive, is the pi still running?
Can you follow these steps to gather some logs on the pi?
https://github.com/Duet3D/DuetSoftwareFramework/wiki/SBC-Setup-Guide#increasing-log-level
-
M122 B100 Diagnostics for board 100: Duet TOOL1LC rev 1.1 or later firmware version 3.5.0-beta.3 (2023-04-13 18:44:05) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 5360, free system stack 92 words Tasks: Move(nWait,0.0%,149) HEAT(nWait,0.2%,85) CanAsync(nWait,0.0%,57) CanRecv(nWait,0.0%,76) CanClock(nWait,0.0%,67) ACCEL(nWait,0.0%,53) TMC(delaying,3.0%,57) MAIN(running,91.7%,346) IDLE(ready,0.0%,27) AIN(delaying,4.9%,142), total 100.0% Last reset 00:13:22 ago, cause: software Last software reset data not available Driver 0: pos 0, 400.0 steps/mm,standstill, SG min 0, read errors 1, write errors 1, ifcnt 79, reads 8000, writes 12, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 6/17, peak Rx sync delay 216, resyncs 0/0, no timer interrupt scheduled VIN voltage: min 24.0, current 24.1, max 24.1 MCU temperature: min 40.8C, current 41.2C, max 41.3C Last sensors broadcast 0x00000002 found 1 248 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 16062, send timeouts 0, received 10443, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, other errors 0 14.4.2023, 23:10:11 M122 B110 Diagnostics for board 110: Duet TOOL1LC rev 1.1 or later firmware version 3.5.0-beta.3 (2023-04-13 18:44:05) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 5568, free system stack 92 words Tasks: Move(nWait,0.0%,149) HEAT(nWait,0.2%,101) CanAsync(nWait,0.0%,57) CanRecv(nWait,0.0%,76) CanClock(nWait,0.0%,67) ACCEL(nWait,0.0%,53) TMC(nWait,3.0%,57) MAIN(running,91.8%,336) IDLE(ready,0.0%,27) AIN(delaying,4.9%,142), total 100.0% Last reset 00:13:16 ago, cause: software Last software reset at 2022-02-23 14:40, reason: StackOverflow, available RAM 2656, slot 0 Software reset code 0x0100 ICSR 0x0000000e SP 0x20007f34 Task HEAT Freestk 4042 ok Stack: 20003fb0 20003fe4 00019d07 00000000 00000000 0000000a 0001a407 00000000 00019511 20003298 fffffffd a5a5a5a5 00000000 00000002 00000000 00000002 0001a1f7 00000000 20002130 200020d4 2000207c 00023368 200020d4 20002130 00000032 200021f8 00013ca5 Driver 0: pos 0, 690.0 steps/mm,standstill, SG min 14, read errors 0, write errors 1, ifcnt 80, reads 4925, writes 12, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 5/16, peak Rx sync delay 213, resyncs 0/0, no timer interrupt scheduled VIN voltage: min 24.2, current 24.2, max 24.3 MCU temperature: min 30.3C, current 36.6C, max 37.1C Last sensors broadcast 0x00000004 found 1 97 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 12759, send timeouts 0, received 10354, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, other errors 0 14.4.2023, 23:10:04 M122 B2 Diagnostics for board 2: Duet EXP3HC rev 1.01 or earlier firmware version 3.5.0-beta.3 (2023-04-13 18:42:24) Bootloader ID: not available All averaging filters OK Never used RAM 157816, free system stack 202 words Tasks: Move(nWait,0.0%,162) HEAT(nWait,0.0%,90) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,79) CanClock(nWait,0.0%,70) TMC(nWait,5.8%,105) MAIN(running,92.8%,443) IDLE(ready,0.0%,40) AIN(delaying,1.3%,265), total 100.0% Last reset 00:13:09 ago, cause: software Last software reset data not available Driver 0: pos 0, 80.0 steps/mm,standstill, SG min n/a, mspos 8, reads 63510, writes 11 timeouts 0, steps req 0 done 0 Driver 1: pos 0, 80.0 steps/mm,standstill, SG min n/a, mspos 8, reads 63510, writes 11 timeouts 0, steps req 0 done 0 Driver 2: pos 0, 80.0 steps/mm,standstill, SG min n/a, mspos 8, reads 63511, writes 11 timeouts 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 3/22, peak Rx sync delay 183, resyncs 0/0, no timer interrupt scheduled VIN voltage: min 24.0, current 24.0, max 24.0 V12 voltage: min 12.2, current 12.2, max 12.2 MCU temperature: min 37.2C, current 37.2C, max 37.8C Last sensors broadcast 0x00000000 found 0 106 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 9492, send timeouts 0, received 13406, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 14.4.2023, 23:10:02 M122 B30 Diagnostics for board 30: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53516, free system stack 184 words Tasks: Move(nWait,0.0%,156) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,62) CanRecv(nWait,0.0%,77) CanClock(nWait,0.0%,68) TMC(nWait,39.7%,344) CLSend(nWait,0.0%,152) MAIN(running,58.4%,415) IDLE(ready,0.1%,29) AIN(nWait,1.8%,267), total 100.0% Last reset 00:13:07 ago, cause: software Last software reset data not available Closed loop enabled: yes, pre-error threshold: 8.00, error threshold: 4.00, encoder type rotaryQuadrature, position 0 Encoder reverse polarity: no, raw count 0 Tuning mode: 0, tuning error: 0x1, collecting data: no Control loop runtime (us): min=5, max=32, frequency (Hz): min=10870, max=17045 Driver 0: pos 0, 80.0 steps/mm,not tuned/calibrated, SG min n/a, mspos 680, reads 20926, writes 20 timeouts 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 2/18, peak Rx sync delay 202, resyncs 0/0, next timer interrupt due in 4 ticks, enabled, next step interrupt due in 3704500696 ticks, disabled VIN voltage: min 24.6, current 24.6, max 24.6 V12 voltage: min 12.2, current 12.2, max 12.2 MCU temperature: min 31.1C, current 31.1C, max 34.1C Last sensors broadcast 0x00000000 found 0 59 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 6327, send timeouts 0, received 13369, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: none I2C bus errors 12, naks 0, other errors 0 14.4.2023, 23:10:00 M122 B21 Diagnostics for board 21: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53344, free system stack 184 words Tasks: Move(nWait,0.0%,156) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,77) CanClock(nWait,0.0%,68) TMC(nWait,39.3%,344) CLSend(nWait,0.0%,152) MAIN(running,58.6%,411) IDLE(ready,0.2%,29) AIN(nWait,1.9%,267), total 100.0% Last reset 00:13:05 ago, cause: software Last software reset data not available Closed loop enabled: yes, pre-error threshold: 8.00, error threshold: 4.00, encoder type rotaryQuadrature, position -1 Encoder reverse polarity: no, raw count 65535 Tuning mode: 0, tuning error: 0x1, collecting data: no Control loop runtime (us): min=5, max=32, frequency (Hz): min=10870, max=17045 Driver 0: pos 0, 80.0 steps/mm,not tuned/calibrated, SG min n/a, mspos 248, reads 55305, writes 20 timeouts 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -1/16, peak Rx sync delay 201, resyncs 0/0, next timer interrupt due in 23 ticks, enabled, next step interrupt due in 3706150520 ticks, disabled VIN voltage: min 27.3, current 27.3, max 27.3 V12 voltage: min 12.1, current 12.1, max 12.1 MCU temperature: min 29.4C, current 29.4C, max 31.8C Last sensors broadcast 0x00000000 found 0 145 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 9435, send timeouts 0, received 13331, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: none I2C bus errors 0, naks 0, other errors 0 14.4.2023, 23:09:58 M122 B20 Diagnostics for board 20: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53340, free system stack 186 words Tasks: Move(nWait,0.0%,156) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,77) CanClock(nWait,0.0%,68) TMC(nWait,39.3%,344) CLSend(nWait,0.0%,152) MAIN(running,58.6%,417) IDLE(ready,0.2%,29) AIN(nWait,1.9%,267), total 100.0% Last reset 00:13:02 ago, cause: software Last software reset data not available Closed loop enabled: yes, pre-error threshold: 8.00, error threshold: 4.00, encoder type rotaryQuadrature, position 0 Encoder reverse polarity: no, raw count 0 Tuning mode: 0, tuning error: 0x1, collecting data: no Control loop runtime (us): min=5, max=32, frequency (Hz): min=10563, max=17045 Driver 0: pos 0, 80.0 steps/mm,not tuned/calibrated, SG min n/a, mspos 936, reads 27495, writes 20 timeouts 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter 0/11, peak Rx sync delay 203, resyncs 0/0, next timer interrupt due in 15 ticks, enabled, next step interrupt due in 3707792031 ticks, disabled VIN voltage: min 24.4, current 24.4, max 24.4 V12 voltage: min 12.1, current 12.1, max 12.1 MCU temperature: min 31.3C, current 31.3C, max 34.2C Last sensors broadcast 0x00000000 found 0 206 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 9408, send timeouts 0, received 13293, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: none I2C bus errors 0, naks 0, other errors 0 -
@Phaedrux ah I did not check the pi then.. I´ll do it
Should I do increase log level before? -
It would be good to increase the log level and then provoke the error.
-
This post is deleted! -
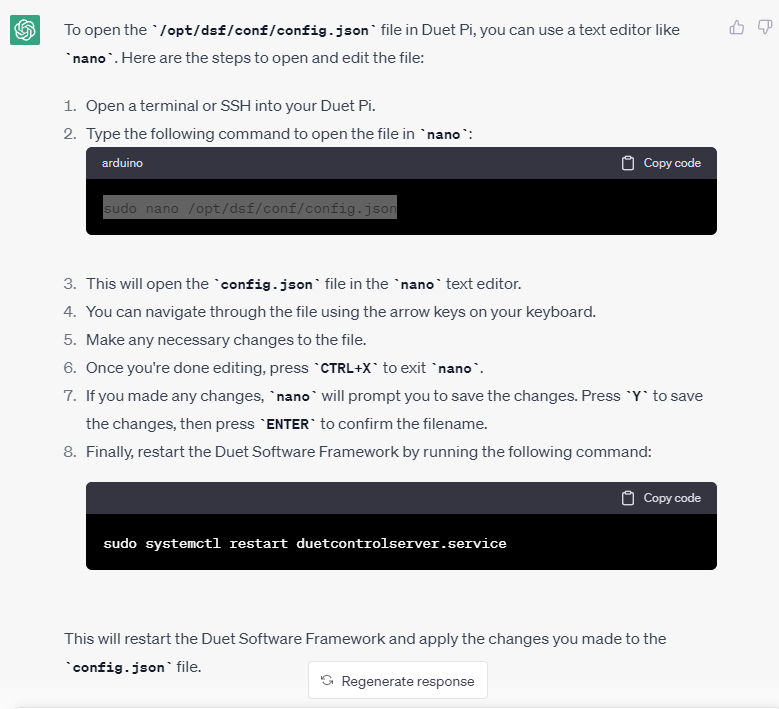
Can you please a small advice how I can open DCS to increase the log level?
Thanks -
-
This post is deleted! -
Printer is stucked every pause.
and gives the last info see picture
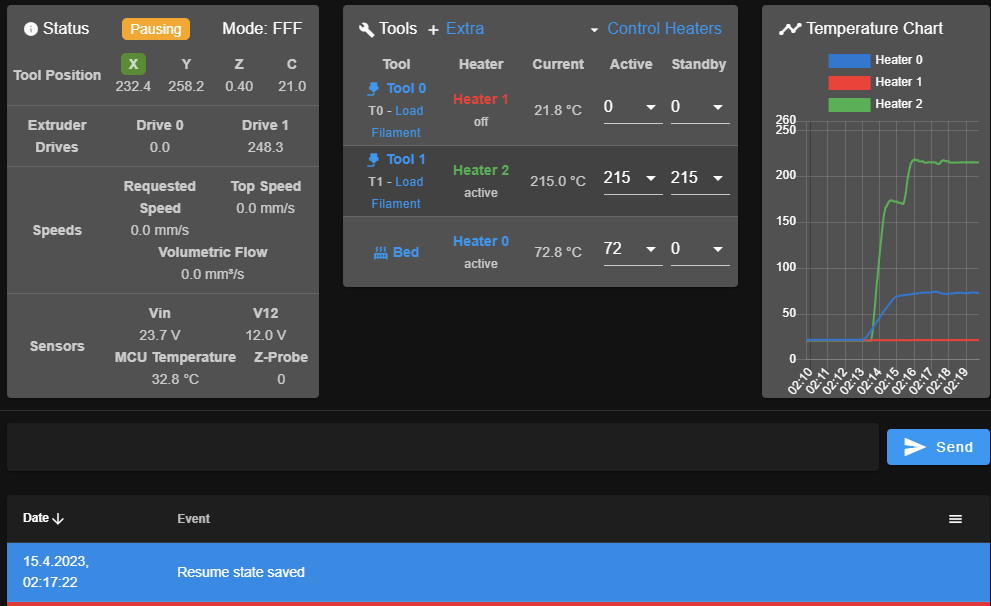
Pi still lives.
It´s doing this when get stucked.
-
is that a normal output?
-
I'm not sure. With using closed loop and beta firmware, we will need to wait and see what @dc42 and @chrishamm have to say.
-
@IndeX4D Please upgrade to 3.5.0-beta.3, send
M122using the G-code console after it gets stuck, and post the output here. That little excerpt from the debug log isn't really useful, I'll need the full log in case the problem persists with 3.5.0-beta.3 and M122 doesn't show anything significant. -
@chrishamm already is 3.5 beta3 and same behaviour.
How can I give you the full log?Edit:
When I print with an older dwc version then 3.5 beta1, I don´t have this problem.