CoreXY 1HCL issues 3.5b3
-
Greetings all (T3P3Toney, DC42, Phaedrux) and any other dev that might be able to help. I am having problems getting my new system to go into closed loop. I have new 1HCL boards (for X/Y), (4) Z axis motors, and an extruder. I am running 3.5.0-B3 on MB6HC and 3.5.0-B3 closed loop plug in. I am running Stepperonline 17E1K-05 100cpr motors (XY) link text My config as follows:
=; Configuration file for Duet 3 MB 6HC (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.15 on Tue Mar 07 2023 13:06:17 GMT-0600 (Central Standard Time) ; General preferences M575 P1 S1 B57600 ; enable support for PanelDue G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"TRON XY4Z" ; set printer name M669 K1 ; select CoreXY mode ; Wait a moment for the CAN expansion boards to start G4 S2 ; Network M552 P192.168.1.59 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives G4 S1 ; Wait for expansion boards to start M569.1 P50.0 R40 I3000 D0.05 T2 C1000 H80 S200 ; Drive 0 | Y stepper 1000PPR M569.1 P51.0 R40 I3000 D0.05 T2 C939.2 H80 S200 ; Drive 1 | X Stepper 1000PPR. M569 P50.0 D4 S1 ; physical drive 121.0 goes forwards Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4), Open loop (D2) Not reversed (S1) M569 P51.0 D4 S1 ; physical drive 122.0 goes forwards Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4), Open loop (D2) Not reversed (S1) M569 P0.0 S1 ; physical drive Z axis 0.0 goes forwards M569 P0.4 S1 ; physical drive Extruder 0.4 goes forwards M584 X51.0 Y50.0 Z0.0:0.1:0.2:0.3 E0.4 ; set drive mapping M671 X-108:476:-108:476 Y15:15:333:333 S10 ;screw 1 (stepper 0) closest to XY home (X-114.3,Y15.875) Screw 2 (stepper 1) near Y switch (X476.25,Y15.875) Screw 3 (stepper2) same side of frame as screw 1 (X-114.3,Y333.375) Screw 4 (stepper3) farthest from XY home (X476.25,Y333.375) M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X82.5 Y82.5 Z402.50 E415.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X1800 Y1800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout M917 X15 Y15 ; Set the closed loop axes to have holding current of zero ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X359 Y354 Z360 S0 ; set axis maxima ; Endstops M574 X1 S1 P"!io1.in" ; configure active-high endstop for low end on X via pin !^io1.in M574 Y1 S1 P"!io2.in" ; configure active-high endstop for low end on Y via pin !^io2.in M591 D0 P1 C"!io3.in" S1 ; simple sensor (high signal when filament present) connected to IO_3 for drive 0, enabled M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"io7.out" ; create servo pin 0 for BLTouch M558 P9 C"io7.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X0 Y25 Z3.2 ; set Z probe trigger value, offset and trigger height M557 X50:320 Y50:320 S50 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out1" T0 ; create bed heater output on out1 and map it to sensor 0 M307 H0 B1 S15.00 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out2" T1 ; create nozzle heater output on out2 and map it to sensor 1 M307 H1 R3.125 K0419:0.162 D4.00 E1.35 S1.00 B0 V24.0 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"out8" Q500 ; create fan 0 on pin out8 and set its frequency M106 P0 C"Tool Fan" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off M950 F1 C"out7" Q500 ; create fan 1 on pin out7 and set its frequency M106 P1 C"Extruder" S1 H1 T45 ; set fan 1 name and value. Thermostatic control is turned on ; Tools M563 P0 S"Micro-Swiss" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ;Miscellaneous M575 P1 S1 B57600My X/Y homing sequence:
; homex.g ; called to home the X axis ; ; generated by RepRapFirmware Configuration Tool v3.2.3 on Mon Mar 08 2021 08:53:31 GMT-0600 (Central Standard Time) M569 P50.0 D0 ; Turn off closed loop G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-610 F3000 ; move quickly to X axis endstop and stop there (first pass) G1 H2 X5 F6000 ; go back a few mm G1 H1 X-610 F240 ; move slowly to X axis endstop once more (second pass) G90 ; absolute positioning G1 X10 F3000 ; Move to a known-safe position M400 ; Wait for the move to complete G4 P500 ; Wait for the motor to settle M569 P51.0 D4 ; Turn closed loop back on M569.6 P51.0 V1 ; Perform the tuning manoeuvres for a quadrature encoder G1 X10 F100M122 B50 shows:
4/23/2023, 7:32:24 AM m122 b50 Diagnostics for board 50: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53412, free system stack 182 words Tasks: Move(nWait,0.0%,104) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,43) CanClock(nWait,0.0%,68) TMC(nWait,45.0%,344) CLSend(nWait,0.0%,152) MAIN(running,52.9%,417) IDLE(ready,0.0%,29) AIN(nWait,2.0%,267), total 100.0% Last reset 00:40:24 ago, cause: software Last software reset data not available Closed loop enabled: yes, pre-error threshold: 2.00, error threshold: 4.00, encoder type rotaryQuadrature, position -274 Encoder reverse polarity: no, raw count 65262 Tuning mode: 0, tuning error: 0, collecting data: no Control loop runtime (us): min=6, max=38, frequency (Hz): min=10135, max=16667 Driver 0: pos 15673, 82.5 steps/mm,ok, SG min 0, mspos 808, reads 712, writes 52753 timeouts 0, steps req 7 done 6079 Moves scheduled 13, completed 13, in progress 0, hiccups 0, step errors 0, maxPrep 62, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -6/7, peak Rx sync delay 209, resyncs 0/0, next timer interrupt due in 23 ticks, enabled, next step interrupt due in 2500122050 ticks, disabled VIN voltage: min 24.4, current 24.4, max 24.4 V12 voltage: min 12.2, current 12.2, max 12.2 MCU temperature: min 24.2C, current 24.4C, max 24.6C Last sensors broadcast 0x00000000 found 0 77 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 19454, send timeouts 0, received 21864, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 316, adv 36955/37189 Accelerometer: none I2C bus errors 12, naks 0, other errors 0M122 B51 shows:
4/23/2023, 7:33:51 AM m122 b51 Diagnostics for board 51: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53476, free system stack 180 words Tasks: Move(nWait,0.0%,110) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,43) CanClock(nWait,0.0%,70) TMC(nWait,40.3%,344) CLSend(nWait,0.0%,152) MAIN(running,57.8%,407) IDLE(ready,0.0%,29) AIN(nWait,1.8%,267), total 100.0% Last reset 00:41:52 ago, cause: software Last software reset data not available Closed loop enabled: no, pre-error threshold: 2.00, error threshold: 4.00, encoder type rotaryQuadrature, position 190 Encoder reverse polarity: yes, raw count 65346 Driver 0: pos -113434, 82.5 steps/mm,standstill, SG min 0, mspos 904, reads 16668, writes 2491 timeouts 0, steps req 4 done 8410 Moves scheduled 12, completed 12, in progress 0, hiccups 0, step errors 0, maxPrep 54, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -7/6, peak Rx sync delay 198, resyncs 0/0, next timer interrupt due in 13 ticks, enabled, next step interrupt due in 2456048963 ticks, disabled VIN voltage: min 24.1, current 24.1, max 24.2 V12 voltage: min 12.0, current 12.0, max 12.1 MCU temperature: min 25.2C, current 25.6C, max 25.6C Last sensors broadcast 0x00000000 found 0 47 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 20139, send timeouts 0, received 22639, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 307, adv 36688/37174 Accelerometer: none I2C bus errors 8, naks 0, other errors 0any help would be great
-
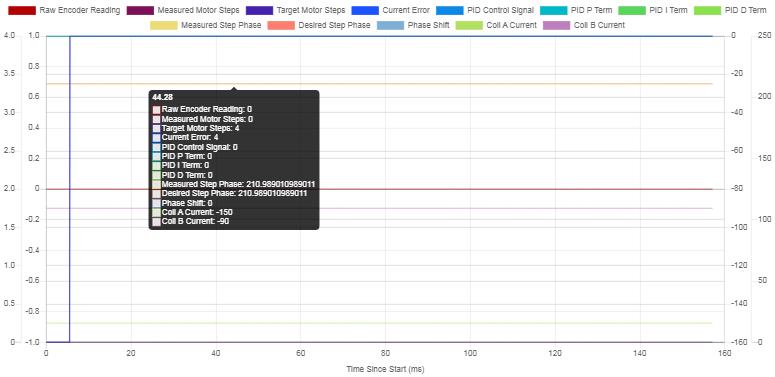
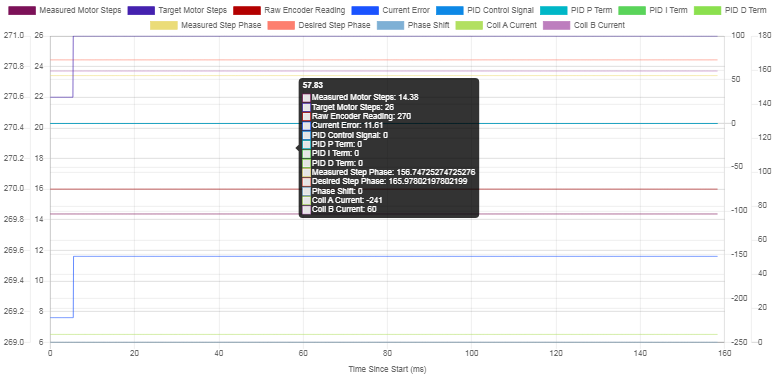
@supertb1 I seen the reverse polarity on P51 so I changed the A+/B+ wires around and now it complains of not being able to calibrate but it shows information on the step maneuver:
51_2023-04-23_04.37.55.csv
-
-
This post is deleted! -
@Herve_Smith thanks... apparently I did that wrong on the first line
-
 undefined supertb1 referenced this topic
undefined supertb1 referenced this topic
-
@supertb1 @T3P3Tony @dc42 @Phaedrux Another development that I have now noticed. Why would homing in closed loop on a core XY kick the second axis out of closed loop?
4/25/2023, 9:42:56 AM M122 b50 Diagnostics for board 50: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53412, free system stack 180 words Tasks: Move(nWait,0.0%,110) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,43) CanClock(nWait,0.0%,70) TMC(nWait,42.9%,344) CLSend(nWait,0.0%,152) MAIN(running,55.2%,407) IDLE(ready,0.0%,29) AIN(nWait,1.9%,267), total 100.0% Last reset 00:01:39 ago, cause: software Last software reset data not available Closed loop enabled: no, pre-error threshold: 2.00, error threshold: 4.00, encoder type rotaryQuadrature, position 10 Encoder reverse polarity: yes, raw count 65526 Driver 0: pos -116735, 82.5 steps/mm,standstill, SG min 0, mspos 632, reads 57493, writes 42675 timeouts 0, steps req 3 done 1643 Moves scheduled 13, completed 13, in progress 0, hiccups 0, step errors 0, maxPrep 15, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -5/5, peak Rx sync delay 205, resyncs 0/0, next timer interrupt due in 6 ticks, enabled, next step interrupt due in 4282244676 ticks, disabled VIN voltage: min 24.4, current 24.4, max 24.4 V12 voltage: min 12.2, current 12.2, max 12.2 MCU temperature: min 24.2C, current 24.6C, max 24.9C Last sensors broadcast 0x00000000 found 0 162 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 368, send timeouts 0, received 394, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 288, adv 37175/37190 Accelerometer: none I2C bus errors 0, naks 0, other errors 0 4/25/2023, 9:42:41 AM G28 X Driver 51.0 basic tuning succeeded, measured backlash 0.091 step 4/25/2023, 9:42:23 AM M122 b51 Diagnostics for board 51: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53412, free system stack 190 words Tasks: Move(nWait,0.0%,104) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,43) CanClock(nWait,0.0%,68) TMC(nWait,42.0%,344) CLSend(nWait,0.0%,152) MAIN(running,56.0%,407) IDLE(ready,0.0%,29) AIN(nWait,1.9%,267), total 100.0% Last reset 00:01:06 ago, cause: software Last software reset data not available Closed loop enabled: no, pre-error threshold: 2.00, error threshold: 4.00, encoder type rotaryQuadrature, position 2 Encoder reverse polarity: yes, raw count 65534 Driver 0: pos -81260, 82.5 steps/mm,standstill, SG min 0, mspos 24, reads 12053, writes 29607 timeouts 0, steps req 1 done 4129 Moves scheduled 8, completed 8, in progress 0, hiccups 0, step errors 0, maxPrep 16, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -6/3, peak Rx sync delay 206, resyncs 0/0, next timer interrupt due in 16 ticks, enabled, next step interrupt due in 4285859782 ticks, disabled VIN voltage: min 24.1, current 24.1, max 24.1 V12 voltage: min 12.0, current 12.0, max 12.1 MCU temperature: min 25.4C, current 25.8C, max 25.8C Last sensors broadcast 0x00000000 found 0 79 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 332, send timeouts 0, received 351, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 290, adv 36887/36909 Accelerometer: none I2C bus errors 0, naks 0, other errors 0 4/25/2023, 9:42:13 AM M122 b50 Diagnostics for board 50: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53412, free system stack 180 words Tasks: Move(nWait,0.0%,110) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,43) CanClock(nWait,0.0%,70) TMC(nWait,40.4%,344) CLSend(nWait,0.0%,152) MAIN(running,56.5%,415) IDLE(ready,1.2%,29) AIN(nWait,1.8%,267), total 100.0% Last reset 00:00:57 ago, cause: software Last software reset data not available Closed loop enabled: yes, pre-error threshold: 2.00, error threshold: 4.00, encoder type rotaryQuadrature, position -1 Encoder reverse polarity: yes, raw count 1 Tuning mode: 0, tuning error: 0, collecting data: no Control loop runtime (us): min=6, max=21, frequency (Hz): min=10563, max=16667 Driver 0: pos -16912, 82.5 steps/mm,ok, SG min 0, mspos 840, reads 48087, writes 36536 timeouts 0, steps req 4 done 5352 Moves scheduled 8, completed 8, in progress 0, hiccups 0, step errors 0, maxPrep 62, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -6/5, peak Rx sync delay 204, resyncs 0/0, next timer interrupt due in 13 ticks, enabled, next step interrupt due in 4284715151 ticks, disabled VIN voltage: min 24.4, current 24.4, max 24.4 V12 voltage: min 12.2, current 12.2, max 12.2 MCU temperature: min 24.2C, current 24.6C, max 24.6C Last sensors broadcast 0x00000000 found 0 141 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 502, send timeouts 0, received 538, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 309, adv 36965/37193 Accelerometer: none I2C bus errors 12, naks 0, other errors 0 4/25/2023, 9:42:02 AM G28 Y Driver 50.0 basic tuning succeeded, measured backlash 0.128 step 4/25/2023, 9:41:45 AM M122 b51 Diagnostics for board 51: Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 53412, free system stack 194 words Tasks: Move(nWait,0.0%,104) HEAT(nWait,0.0%,86) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,43) CanClock(nWait,0.0%,68) TMC(nWait,39.1%,356) CLSend(nWait,0.0%,152) MAIN(running,55.2%,417) IDLE(ready,3.8%,29) AIN(nWait,1.9%,267), total 100.0% Last reset 00:00:29 ago, cause: software Last software reset data not available Closed loop enabled: yes, pre-error threshold: 2.00, error threshold: 4.00, encoder type rotaryQuadrature, position 4 Encoder reverse polarity: yes, raw count 65532 Tuning mode: 0, tuning error: 0, collecting data: no Control loop runtime (us): min=6, max=21, frequency (Hz): min=11538, max=16667 Driver 0: pos -49086, 82.5 steps/mm,ok, SG min n/a, mspos 8, reads 38729, writes 64036 timeouts 0, steps req 2 done 0 Moves scheduled 4, completed 4, in progress 0, hiccups 0, step errors 0, maxPrep 56, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0 Peak sync jitter -7/3, peak Rx sync delay 202, resyncs 0/0, next timer interrupt due in 8 ticks, enabled, next step interrupt due in 4273061101 ticks, disabled VIN voltage: min 24.1, current 24.1, max 24.1 V12 voltage: min 12.0, current 12.0, max 12.1 MCU temperature: min 25.4C, current 25.6C, max 25.8C Last sensors broadcast 0x00000000 found 0 91 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 273, send timeouts 0, received 278, lost 0, free buffers 37, min 37, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 306, adv 36670/37183 Accelerometer: none I2C bus errors 12, naks 0, other errors 0 4/25/2023, 9:41:37 AM G28 X Driver 51.0 basic tuning succeeded, measured backlash 0.100 step -
 undefined Phaedrux moved this topic from Duet Hardware and wiring
undefined Phaedrux moved this topic from Duet Hardware and wiring
-
@supertb1 I can see two things that you need to change:
-
Both motors should use C1000 in their M569.1 command. Currently you have one set to 1000 and the other set to a little less.
-
As your machine is a CoreXY, before homing either X or Y you should set both motors to open loop. Then use M569.6 to calibrate both of them.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
-
@dc42 I put the count back to 1000 the one drive.. it was the firmware that gave that feedback in an error as to the read counts.
on the Home sequence instead of M569 P50.0/P51.0 "D0" it should read M569 P50.0/51.0 "D2"? What should the closed loop homing sequence look like with the 3.5.0-B3? -
@dc42 I'm not sure what changes need to be made to my homing sequence as listed above, the first line of the sequece shows "M569 P51.0 D0" that should take it out of closed loop and then the axis homes 2 times, then moves to a safe spot and then turns the closed loop feature back on the axis "M569 P51.0 D4" and then performs the polarity detection and zeroing move "M569.6 P51.0 V1" ... as I am typing this I realized that I have the wrong 1HCL listed at the beginning of the sequence...lol... I can't wait for the online configurator to make this stupid proof...lol.
-
@dc42, @Phaedrux, @T3P3Tony Any idea why I get this error on start up?
4/27/2023, 9:21:26 PM m122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.3 (2023-04-14 11:28:15) running on Duet 3 MB6HC v1.02 or later (standalone mode) Board ID: 08DJM-956BA-NA3TJ-6J1F8-3S06R-1U82S Used output buffers: 1 of 40 (40 max) Error in macro line 1 while starting up: Bad command: = === RTOS === Static ram: 154728 Dynamic ram: 118912 of which 200 recycled Never used RAM 69224, free system stack 135 words Tasks: NETWORK(ready,72.2%,207) ETHERNET(nWait,0.0%,401) HEAT(nWait,0.0%,324) Move(nWait,0.0%,243) CanReceiv(nWait,0.0%,772) CanSender(nWait,0.0%,334) CanClock(delaying,0.0%,341) TMC(nWait,16.0%,59) MAIN(running,11.7%,137) IDLE(ready,0.0%,30), total 100.0% Owned mutexes: === Platform === Last reset 02:58:10 ago, cause: software Last software reset at 2023-04-27 18:21, reason: User, Gcodes spinning, available RAM 69224, slot 0 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0044a000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x04 Aux0 errors 0,0,0 MCU temperature: min 32.1, current 34.7, max 35.4 Supply voltage: min 23.6, current 23.7, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 11.7, current 12.1, max 12.5, under voltage events: 0 Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/28/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min 0, mspos 680, reads 35246, writes 19 timeouts 0 Driver 1: standstill, SG min 0, mspos 680, reads 35246, writes 19 timeouts 0 Driver 2: standstill, SG min 0, mspos 680, reads 35246, writes 19 timeouts 0 Driver 3: standstill, SG min 0, mspos 680, reads 35247, writes 19 timeouts 0 Driver 4: standstill, SG min n/a, mspos 8, reads 35252, writes 14 timeouts 0 Driver 5: standstill, SG min n/a, mspos 8, reads 35255, writes 11 timeouts 0 Date/time: 2023-04-27 21:19:28 Slowest loop: 27.39ms; fastest: 0.06ms === Storage === Free file entries: 20 SD card 0 detected, interface speed: 25.0MBytes/sec SD card longest read time 2.5ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 3, maxWait 60276ms, bed compensation in use: none, comp offset 0.000 no step interrupt scheduled === DDARing 0 === Scheduled moves 20, completed 20, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 0 is on, I-accum = 0.0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000005 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === Filament sensors === Extruder 0 sensor: ok === CAN === Messages queued 96343, received 171224, lost 0, boc 0 Longest wait 13ms for reply type 6018, peak Tx sync delay 63438, free buffers 50 (min 46), ts 53452/53450/0 Tx timeouts 0,0,1,0,0,0 last cancelled message type 30 dest 127 === Network === Slowest loop: 46.76ms; fastest: 0.03ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = State: active Error counts: 0 0 0 1 0 0 Socket states: 5 2 2 2 2 0 0 0 = WiFi = Network state is disabled Module is disabled Failed messages: pending 0, notready 0, noresp 0 Socket states: 0 0 0 0 0 0 0 0 === Multicast handler === Responder is inactive, messages received 0, responses 0 4/27/2023, 9:17:08 PM Error in start-up file macro line 1: Bad command: = -
@supertb1 said in CoreXY 1HCL issues 3.5b3:
Error in macro line 1 while starting up: Bad command: =
Error in start-up file macro line 1: Bad command: =Is this what you mean?
-
@Phaedrux yes
-
You have an = sign before the comment ; on line 1 of your config
=; Configuration file for Duet 3 MB 6HC (firmware version 3.3) -
@OwenD thank you
-
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux has marked this topic as solved
-