@fcwilt
here you can see the video above. that is, it is not just a fantasy but an already implemented prototype.
Best posts made by Pro100sanek23
-
RE: The coefficients of the extruder.posted in Firmware developers
Latest posts made by Pro100sanek23
-
RE: My BLV MGN cube build/upgrade saga (ongoing)posted in My Duet controlled machine
@whopping-pochard
hi, can you share a link or files of the back wall and electronics mounts? thanks -
RE: The coefficients of the extruder.posted in Firmware developers
@droftarts
I agree, we need a 4x4 matrix where the fourth coordinate will be the coefficients of the extruder. as a result, the matrix will look something like this x1:1:0: 1 y1: -1 :0:1 z0:0:1: 0 e0:0:0: 1 -
RE: The coefficients of the extruder.posted in Firmware developers
@droftarts
my friend who created the prototype from the video is now working on the implementation of this kinematics in the Klipper. a friend contacted the creator of the Klipper and was interested in this idea, but so far there is no implementation of this kinematics in the Klipper. I volunteered to help him implement the RRF in the firmware. if dear @dc42 helps, I will be very happy and grateful. I wrote my vision of how this can be implemented in the topic that you asked. if you give access to the extruder to the m669 team, then the implementation would not be very difficult. I can be wrong to the best of my inexperience. -
RE: The coefficients of the extruder.posted in Firmware developers
@Rushmere3D thanks for the answer. but I had a little different.
-
RE: The coefficients of the extruder.posted in Firmware developers
@fcwilt
here you can see the video above. that is, it is not just a fantasy but an already implemented prototype. -
RE: The coefficients of the extruder.posted in Firmware developers
@droftarts
yes, that topic has a direct connection to this question. if it is not forbidden, then I will leave a link to the video where it is clearly demonstrated what I would like to achieve.
https://youtu.be/TQYYHrxIG90
the printer on the video runs on the marlin firmware, I have the same RRF and I would also like to use this extruder on the RRF firmware. -
The coefficients of the extruder.posted in Firmware developers
Tell me please , how to change the motion coefficients of the extruder. it is necessary that when the XY axes change, this is transmitted to the movement of the extruder.
-
m669 custom movement of the extruder axisposted in Tuning and tweaking
tell me how to set the formula( coefficients) for the extruder motor. I want to implement the transfer of rotation of the extruder, the motor standing on the frame with a belt, on the kinematics of CoreXY. to do this, you need to compensate for the movement along the X and Y axes. I have already implemented this on another firmware, but I would like to make support for RRF as well. the m669 command gives access only to XYZUV and not to E, well, or I did not understand how to register it
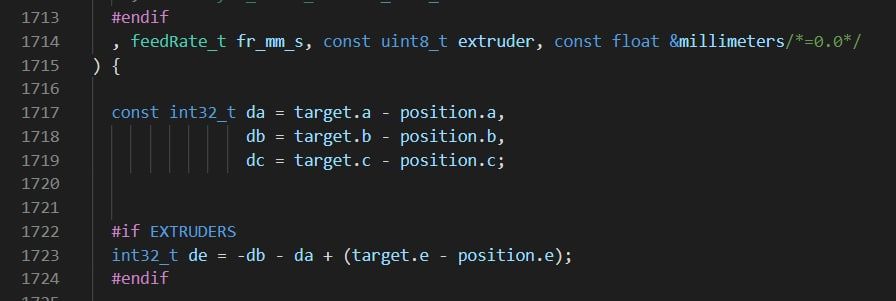
here is the formula from the marlin firmware.
in my view, it looks like this:
M669 X1:0:0 Y0:1:0 Z0:0:1 E-1 : -1 :0 -
m669 custom movement of the extruder axisposted in General Discussion
tell me how to set the formula( coefficients) for the extruder motor. I want to implement the transfer of rotation of the extruder, the motor standing on the frame with a belt, on the kinematics of CoreXY. to do this, you need to compensate for the movement along the X and Y axes. I have already implemented this on another firmware, but I would like to make support for RRF as well. the m669 command gives access only to XYZUV and not to E, well, or I did not understand how to register it
here is the formula from the marlin firmware.
in my view, it looks like this:
M669 X1:0:0 Y0:1:0 Z0:0:1 E-1 : -1 :0