Coming soon to a PanelDue near you...

Best posts made by dc42
-
RE: Does anyone here work on Superslicer?posted in General Discussion
-
Software bundle 3.4.0 stable released!posted in Firmware installation
On behalf of the Duet3D team I am please to announce the release of RepRapFirmware, Duet Web Control and Duet Software Framework 3.4.0 stable.
RepRapFirmware 3.4.0 brings more than 90 new and improved features and around 80 bug fixes. New features include:
- Input shaping, to allow faster print speeds without exciting ringing
- Thumbnail image display of print files in Duet Web Control and on PanelDue (requires a compatible slicer and PanelDue firmware 3.4.1-pre2
- Heater feedforward, to maintain more even nozzle temperatures on high flow rate extruders
- More flexible control of power supplies
- More control over machine behaviour when heater faults, stepper driver warnings etc. occur
- Support for the new Duet 3 MB6XD main board for use with external drivers, and the EXP1HCL closed loop stepper motor control board
- Coordinate rotation in the XY plane
Duet Web Control and Duet Software framework now provide:
- Thumbnail image display
- Improved plugin support and new plugin guides for DWC and DSF
- A new HTTP class library for remote control of Duets in standalone and SBC mode
- 12864 display support in SBC mode
Important! If you are upgrading from software 3.3 or earlier, read at least the upgrade notes section of the RRF 3.4.0 release notes to see what alterations if any you may need to make to your configuration and macro files. Users already running 3.4.0RC2 can instead check the abbreviated release notes.
Upgrade instructions:
- For Duet in standalone mode you can find the upgrade files here. Most users can just upload the Duet2and3Firmware-3.4.0.zip file.
- For Duet with attached Single Board Computer, upgrade from the stable feed on the Duet3D package server using apt-get as usual.
Please do not use this thread to report issues with this release that require a response; start a new thread for those instead.
-
New stable firmware bundle 3.2 releasedposted in Firmware installation
On behalf of the Duet 3D team I am pleased to announce RepRapFirmware 3.2 stable. Here are the upgrade instructions:
- If you are running RepRapFirmware 3.0 or later in standalone mode, download Duet2and3Firmware.zip from https://github.com/Duet3D/RepRapFirmware/releases/tag/3.2 and upload it to your Duet via the web interface
- If you are using Duet + SBC, update from the package server in the usual way (
sudo apt-get updatefollowed bysudo apt-get upgrade) - If you are running RepRapFirmware 2.x you will need to upgrade to firmware 3.0 first, then you can immediately upgrade to 3.2. Alternatively, if you are comfortable using Bossa, you can upgrade directly to 3.2 using Bossa.
Upgrade notes and change lists:
- RRF: https://github.com/Duet3D/RepRapFirmware/blob/v3-dev/WHATS_NEW_RRF3.md
- DWC: https://github.com/Duet3D/DuetWebControl/blob/master/WHATS_NEW.md
- DSF: https://github.com/Duet3D/DuetSoftwareFramework/blob/master/WHATS_NEW.md
If you encounter problems with this release, or problems upgrading to it, please start a new thread to describe those issues.
Edit: If you are on the unstable package feed (Duet + SBC), you can update to the latest version as usual again. The corresponding packages have been fixed.
-
RepRapFirmware road map Q1 2021posted in Future Direction
These are our current plans for RRF over the next few months:
RRF 3.2: release candidate 2 appears to be very stable so we plan to release 3.2 final very soon.
RRF 3.3: this is planned to be a short cycle. Work on it has already started. The focus is on making Duet main boards easier to test using our new CAN-based automatic test equipment. As a side-effect of this work, there may be experimental support for using a Duet 3 Mini as a Duet 3 expansion board (see the M954 command), however functionality will probably be limited to driving motors and reading/writing GPIO ports. RRF 3.3 will also increase the maximum number of axes supported to 15, and I expect to provide support for tuning heaters on regular Duet 3 expansion and tool boards. Some other easy-to-implement features may be included. I hope to have a release candidate available by the end of January.
RRF 3.4: the focus of this will be the motion system. We will be looking at input shaping, S-curve acceleration, better cornering algorithms, and other mechanisms to improve print quality. Alongside this we will remove the limitation on using endstops connected to Duet 3 main boards to control motors connected to expansion boards. We expect to start work on this in February. We have a long list of other new features for consideration in this release, including further improvements to the performance of the Duet 3 MB6HC board.
-
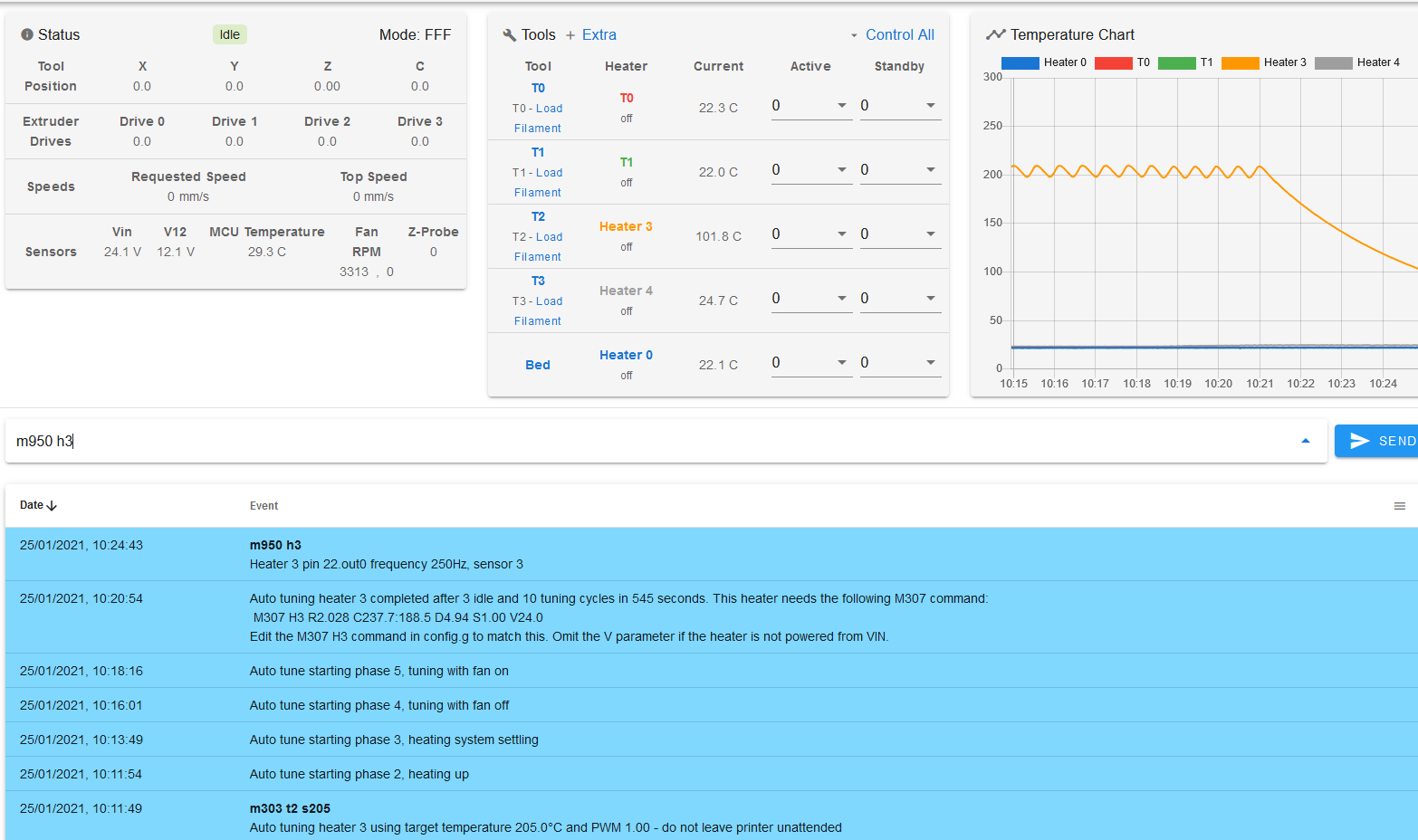
New heater tuning algorithmposted in Beta Firmware
I finally found time to implement the new heater tuning algorithm. This algorithm is more accurate than the old one (especially in measuring the dead time), often completes more quickly than the old algorithm, and is more portable to expansion and tool board firmware.
The new algorithm also tunes the heater with related fans both off and on. The purpose of this is to allow the heater control to implement feedforward, which monitors fan PWM changes and adjusts the heater power in advance of the PID algorithm spotting that something has changed. Here is a temperature plot showing the effect on reported hot end temperature when a print cooling fan is turned on and then off, with and without feedforward.
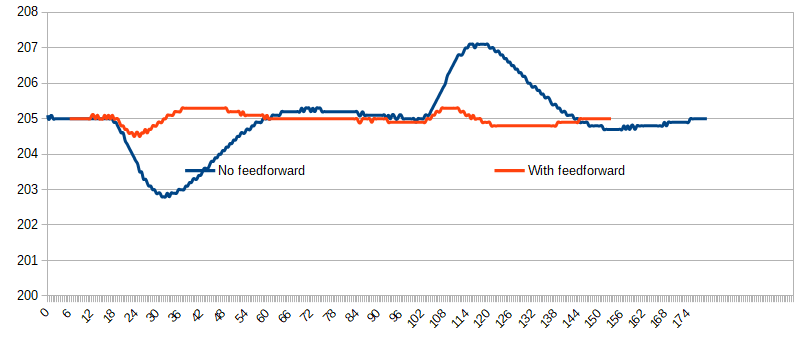
The new algorithm is implemented in RRF 3.2beta3.2 which I hope to release later today. Subject to the feedback I receive from beta testers, I hope to include it in tool and expansion board firmware too in the RRF 3.2 final release.
-
RepRapFirmware 3.0 is released!posted in Firmware installation
I am pleased to announce the release of RepRapFirmware 3.0, the first stable release in the RepRapFirmware 3 series.
Users of Duet 3 with attached Raspberry Pi can upgrade to it using apt-get update and apt-get upgrade as usual, from either the stable or the unstable package feed.
Duet 2 users and Duet 3 users running in standalone mode can download it from https://github.com/dc42/RepRapFirmware/releases/tag/3.0. Most users should be able to upgrade just by uploading the .zip file to /sys in Duet Web Control.
If you are currently using RepRapFirmware 2.x, you will need to make significant changes to your config.g file when upgrading to RRF3. See https://duet3d.dozuki.com/Wiki/RepRapFirmware_3_overview#Section_Summary_of_what_you_need_to_do_to_convert_your_configuration_and_other_files for details. You should read this thoroughly and plan your migration to RRF3.
Now that RepRapFirmware 3 is released, I do not plan to do any further releases of RepRapFirmware 2.x or 1.x. But of course it is possible for others to fork the repository and do their own amendments to 1.x and 2.x.
-
Software package 3.3beta3 releasedposted in Beta Firmware
On behalf of the Duet3D team, I am pleased to announce the release of software package 3.3beta3. This release brings the following:
- Global variables are now included in the object model. This means they can be viewed in the DWC Object Model browser and can be accessed by SBC add-ons.
- The DWC Object Model browser now provides a summary of what each value means
- RRF and DWC now support accelerometers (currently in standalone mode only) in preparation for the forthcoming support for input shaping. See https://duet3d.dozuki.com/Wiki/Accelerometers.
- Many other minor improvements and bug fixes
RRF release notes: https://github.com/Duet3D/RepRapFirmware/wiki/Changelog-RRF-3.x-Beta-&-RC#reprapfirmware-33beta3
DWC release notes: https://github.com/Duet3D/DuetWebControl/releases/tag/v3.3-b3
DSF release notes: https://github.com/Duet3D/DuetSoftwareFramework/releases/tag/v3.3-b3Users of Duet + SBC can upgrade from the unstable package server.
Users of Duet in standalone mode can upgrade using the files at https://github.com/Duet3D/RepRapFirmware/releases/tag/3.3beta3. The IAP files have not changed but they are included in this release because some users may need to re-upload them to put them in the correct folder on the SD card.
-
RE: Duet hardware actually makes it into Thomas Salanderer's videosposted in General Discussion
A genuine Einsy Rambo board is $120 on Ultimachine's web site, and it has only 4 stepper drivers, an 8-bit processor and no web interface. So I think $130 is in the right ball park for a high-quality board that comes with support and a warranty. In time I expect the price will come down.
MKS can only sell boards as cheaply as they do by parasitising open source designs, violating the open source license agreements, offering no support and little or no warranty, and selling boards before they have got the design right (as happened with the SBase). We're not like that.
-
RE: Email/notifications from Duet wifiposted in Duet Web Control
Our latest thoughts about this are to embed a MQTT client in RRF that publishes messages about the current state of the printer e.g. printer powered up, print started, print completed, print paused by filament monitor.
-
Limited service from me for the next 3 weeksposted in General Discussion
The TCT show takes place from 24-27 September, and I have a lot of firmware to finish before then so that we can demonstrate some exciting new hardware! So I hope you will accept my apologies for being less responsive over the next 3 weeks. Fortunately there are several other experienced Duet users who are providing excellent advice on this forum.
-
Software bundle 3.5beta1 releasedposted in Beta Firmware
On behalf of the Duet3d team I am pleased to announce this last-minute Christmas present to our users. Those of you brave enough to unwrap it can find the files for standalone systems at https://github.com/Duet3D/RepRapFirmware/releases/tag/3%2C5beta1 and the files for SBC systems on the unstable feed of the package server.
This is the first release since major changes to the motion planning system (to accommodate multiple asynchronous motion systems) so I am expecting bugs to turn up, despite the testing we have done on multiple printers covering the most popular kinematics.
Feel free to post your experiences in this thread; but please don't post long problem descriptions that require a response here. Instead, describe them in a new thread with [3.5beta1] in the title. Bear in mind that support from Duet3D will be limited until 3 January, so you may need to revert to release 3.4.5 to continue using your machine.
SBC users can find instructions for switching to the unstable package server and reverting if necessary at https://docs.duet3d.com/en/User_manual/Machine_configuration/DSF_RPi#switch-to-unstable-packages.
RRF release notes: https://github.com/Duet3D/RepRapFirmware/wiki/Changelog-RRF-3.x-Beta#reprapfirmware-350beta1
DWC release notes: https://github.com/Duet3D/DuetWebControl/wiki/Changelog-DWC-3.x-Beta#version-35-b1
DSF release notes: https://github.com/Duet3D/DuetSoftwareFramework/wiki/Changelog-DSF-3.x-Beta#version-35-b1Happy holidays!
-
New repository for machine configuration filesposted in General Discussion
I have created a repository at https://github.com/Duet3D/RRF-machine-config-files to host configuration and related files for RepRapFirmware. User contributions are encouraged. See the README file there for more details.
-
Reduced service from me this weekposted in General Discussion
We have some exciting new hardware prototypes arriving at the end of this week, and I need to have the firmware ready for them. So I won't be spending much time on the forum this week. My apologies to those who are waiting on me to investigate issues. @droftarts and @Phaedrux will be around to handle questions about warranty returns, and of course they and our many valued community members will be around to help on a wide variety of topics.
-
RepRapFirmware road map as at 15 February 2020posted in General Discussion
Here is a summary of development work on RepRapFirmware planned for the near future.
RRF 3.01, expected early March 2020
New firmware features:
- GCode meta commands complete, but no support for variables yet
- Object model mostly complete
- GCode (M409) and HTTP (rr_model) commands provided to retrieve parts of the object model
- Daemon GCode task
New Duet 3 hardware support:
- Tool Board
- Enumeration of connected expansion and tool boards
- Triggers (M581) and wait-for-input (M577) supported on expansion and tool boards
- Emergency Stop to shut down expansion boards and tool boards
RRF 3.02
New firmware features:
- Variables in GCode meta commands
- Support object model expressions in 12864 display menus
- Support image buttons on 12864 display
- Support cancelling some objects on a build plate (M486)
- Support configuration of aux serial port either not at all (for Duet 3), in PanelDue mode (default), or in raw mode
- Improved M303 heater tuning algorithm
- Improved laser rastering support (multiple laser power values per G1 movement)
New Duet 3 hardware support:
- Support M303 on Duet 3 expansion and tool boards
- Support filament monitors connected to expansion and tool boards
- Support switch-type Z probes on expansion and tool boards
- Report stalls from expansion and tool boards
Later
RPi connection option for Duet 2
-
Software 3.5.1 releasedposted in Firmware installation
On behalf of the Duet3D team I am very pleased to announce the availability of stable version 3.5.1. This fixes a bug in the 3.5.0 release that was triggered by using M400 in the deployprobe.g or retractprobe.g. file. We have now withdrawn release 3.5.0.
Highlights of this release compared to 3.4.6 include:
- Support for multiple motion systems and our new scanning Z-probe
- Input shaping support on axes driven by CAN-connected expansion boards
- New WiFi firmware version 2.1 featuring (partial) WPA enterprise support
- Modern code editor in DWC based on the VSCode editor (Monaco)
- Transition of DWC code files from JavaScript to TypeScript and upgrade from Webpack 4 to 5
- Input Shaping plugin now integrated in DWC
- New DSF HTTP compatibility layer for RepRapFirmware
rr_HTTP requests - DSF suppot for new Debian Bookworm images (for new DuetPi images)
- New ConfigTool with many more improvements
As with every stable release, we highly recommend reading the upgrade notes or using the ReleaseMgr plugin in order to avoid upgrade issues for:
Users in standalone mode can obtain the upgrade bundle here.
New stable DuetPi images based on the latest Raspberry Pi OS (Debian Bookworm) including upgrade instructions are now available here. Users in SBC mode should consider upgrading to that DuetPi version because the current version will reach its EOL soon (Debian Buster's EOL is scheduled for June 30th, 2024). If you're in SBC mode and don't want to upgrade, you can update the packages as always using the regular apt update/upgrade method. This upgrade method will be surperseded by
M997 S2in the new image to simplify the update process.If you see "Incompatible Software Versions" in your browser upon first launch, press
Ctrl+Shift+Rto reload the cached version in your browser. In case you encounter other problems, please open a new thread with[3.5.1]in the title. -
Supporting multiple configurations on a single Duetposted in Firmware wishlist
I've been thinking about how to make it easier for me to investigate possible firmware issues on the forum. Each time I need to set up an SD card with the new config and homing files on it; or overwrite the existing ones on my bench system, but then I lose the old ones unless I back them up separately. So I've worked out a scheme to support multiple configurations more easily, and I wonder whether there are other Duet users who might find this useful.
What I have in mind is that each configuration would be stored in a subdirectory of /sys on the SD card. There would be a new M-code to change the system directory from /sys to a specified subdirectory of /sys. After that, all system macro files would be fetched from that folder instead of /sys. Likewise any files in M98 commands that don't provide a full path.
My master config.g file in /sys would then just contain two lines:
Mnnn "/sys/xxxx" ; where xxxx is the subfolder I want to use M98 P"config.g"To switch configurations, I would edit the first line in System Editor of DWC and allow it to restart.
Would anyone else find this useful? Does anyone have a better suggestion?
-
Software bundle 3.5.0-beta.3 now availableposted in Beta Firmware
On behalf of the Duet3D team I am please to announce the availability of the latest 3.5 beta software release. This release provides pressure advance synchronised to input shaping, which should make pressure advance tuning more or less independent of any input shaping that is configured. Additionally, input shaping is supported on axes whose motors are driven by CAN-connected expansion boards, for example our Expansion 1HCL closed loop stepper driver board.
Also included in RepRapFirmware are several minor feature improvements, bug fixes, and a preview of the forthcoming support for scanning Z probes. Duet Web Control now displays and checks its own version and the versions of firmware on any expansion boards against the main board firmware version, and warns if there are any discrepancies.
Please read at least the Upgrade Notes section of the release noted before updating your software; and if you are upgrading from a version older than 3.5beta2, the upgrade notes for releases you have skipped too.
RRF release notes: https://github.com/Duet3D/RepRapFirmware/wiki/Changelog-RRF-3.x-Beta#reprapfirmware-350beta3
DWC release notes: https://github.com/Duet3D/DuetWebControl/wiki/Changelog-DWC-3.x-Beta#version-350-beta3
DSF release notes: https://github.com/Duet3D/DuetSoftwareFramework/wiki/Changelog-DSF-3.x-Beta#version-350-beta3Users running in standalone mode can find the new files at https://github.com/Duet3D/RepRapFirmware/releases/tag/3.5.0-beta.3. Users running with attached SBC should upgrade from the unstable feed on the Duet3D package server,
If you encounter any new problems with this release, please report them in a new thread with [3.5.0-beta.3] included in the title, or in an existing thread with that tag that describes a similar problem.
-
Duet 3 demo at TCTposted in General Discussion
Apologies for the poor video quality, I filmed it on my smartphone.
-
Simple print spooler for RRFposted in Using Duet Controllers
Some of you may have seen Tom Sanladerer's video https://www.youtube.com/watch?v=8O9E9rcH6Us in which he showed a device he built to swap magnetic beds automatically, so that he could start printing a new file as soon as the previous print is finished.
This obviously needs a print queue system to allow it work unattended without having to combine the GCode files for each print into a single file.
So I've knocked up some quick-and-dirty print spooler macros for RRF which you can find at https://www.dropbox.com/sh/xygtlsyvn2ludn0/AADVxBYxWkcf1v8PuOtwq1kva?dl=0. Feel free to try them if you have a suitable printer! They are a bit clunky because RRF condition GCode doesn't yet support array-valued variables, so the print queue is limited to 5 files. Also the print queue is not saved if you cycle the power; but that will be easier to implement in RRF 3.4.
If you don't like having to send M98 P"/macros/Queue file to print" S"benchy.gcode" to queue a new print file, remember that you can define new GCodes by creating a suitable macro file. For example, if you rename or copy file /macros/Queue file to print to /sys/M990.g then you can send M990 S"benchy.gcode" to queue a file instead.