@Phaedrux one last question. I printed what you shared (thank you). But, when printing, I had to baby step down to -.480 to get it to be correct on the bed. Where do I make this adjustment? In my gcode for printing or in my offset in config.g? I expected it to be right on, but it was not.
Posts made by dismania
-
RE: BL Touch Questionposted in General Discussion
-
RE: BL Touch Questionposted in General Discussion
@Phaedrux for the gcode, what should I have in it?
G80
G29I am a bit confused as to what triggers the mesh leveling and bed compensation.
-
RE: BL Touch Questionposted in General Discussion
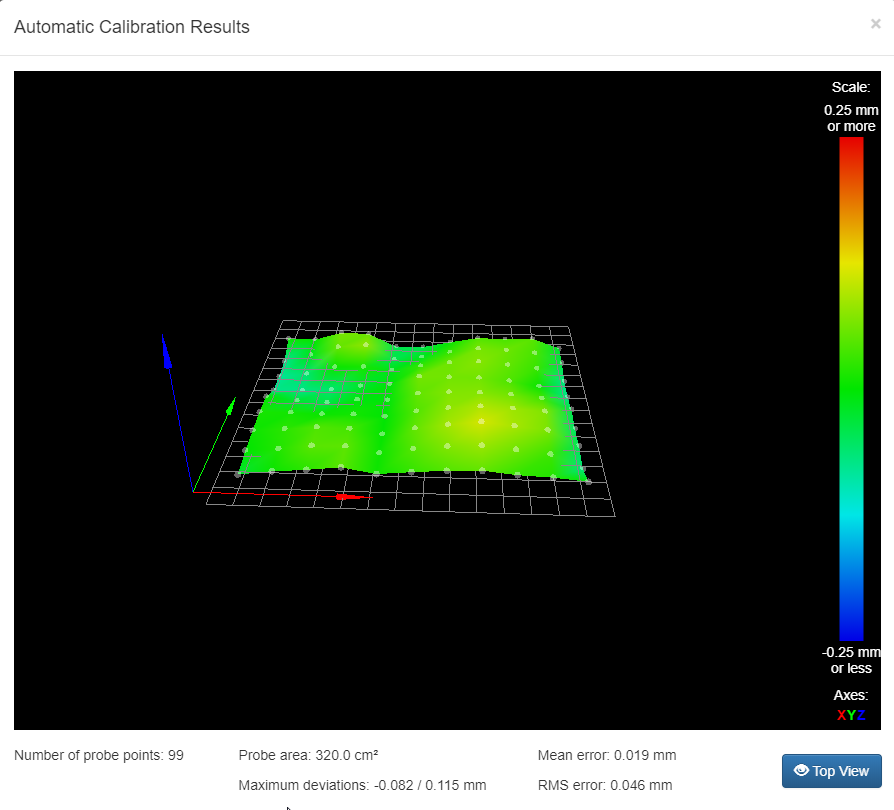
Is this calibration map close enough or would you tweak it more?
-
RE: BL Touch Questionposted in General Discussion
@Phaedrux thanks so much! I am trying it now. I have aPrisa MK3 that I am upgrading to the Bear frame and using the new board. I want to get things as perfect as possible before compensation. So, I know that the center screw on the bed is tightened to a set point, the rest are adjustable in my scenario, so I have set the Z probe to trigger directly over that fixed point and then I should be able to adjust the edges up and down to get something very flat. What range am I looking for in terms of deviation?
-
RE: BL Touch Questionposted in General Discussion
@Phaedrux Currently, I am just running the G29 to try to get the bed as level as possible when I start out. I will certainly change my initial probe to be at the center when I get everything squared away.
-
RE: BL Touch Questionposted in General Discussion
@Phaedrux - Homeall.g
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v2 on Wed May 01 2019 14:56:47 GMT-0500 (CDT)
G91 ; relative positioning
G1 Z5 F6000 S2 ; lift Z relative to current position
G1 S1 X5 F1000 ; move slowly away
M913 X50 Y50 ; Lower motor current to 50% for sensorless homing
G1 S1 X-255 F2800 ; move quickly to X axis endstop and stop there (first pass)
G1 X5 F6000 ; go back a few mm
G1 S1 X-255 F2800 ; move slowly to X axis endstop once more (second pass)
G1 S1 Y5 F1000 ; move slowly away
G1 S1 Y-255 F2400 ; move quickly to Y axis endstop and stop there (first pass)
G1 Y5 F6000 ; go back a few mm
G1 S1 Y-255 F2400 ; move slowly to Y axis endstop once more (second pass)
M913 X100 Y100 ; Return motor current to 100%
G90 ; absolute positioning
G30 ; set z height based on trigger height; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 S2 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
RE: BL Touch Questionposted in General Discussion
Config.g
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v2 on Wed May 01 2019 14:56:47 GMT-0500 (CDT); General preferences
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves; Network
M550 PBearcat ; Set machine name
M552 S1 ; Enable network
;*** Access point is configured manually via M587
M586 P0 S1 ; Enable HTTP
M586 P1 S1 ; Enable FTP
M586 P2 S1 ; Enable Telnet; Drives
M569 P0 S1 ; Drive 0 goes forwards: X Axis
M569 P1 S0 ; Drive 1 goes backwards: Y Axis
M569 P2 S1 ; Drive 2 goes forwards: Z Axis
M569 P3 S1 ; Drive 3 goes forwards: E Axis
M569 P4 S1 ; Drive 4 goes forwards: Z Axis (at E1)
M350 X16 Y16 E16 Z16 I1 ; Configure microstepping with interpolation
M92 X100.00 Y100.00 Z400.00 E475.00 ; Set steps per mm
M566 X420.00 Y420.00 Z12.00 E300.00 ; Set maximum instantaneous speed changes (mm/min)
M203 X10000.00 Y10000.00 Z720.00 E1500.00 ; Set maximum speeds (mm/min)
M201 X2000.00 Y2000.00 Z200.00 E2000.00 ; Set accelerations (mm/s^2)
M906 X720.00 Y720.00 Z450.00 E550.00 I10 ; Set motor currents (mA) and motor idle factor in percent
M84 S30 ; Set idle timeout; Motor remapping for dual Z
M584 X0 Y1 Z2:4 E3 ; two Z motors connected to driver outputs Z and E1
M671 X-37:287 Y0:0 S10 ; leadscrews at left (connected to Z) and right (connected to E1) of X axis; Axis Limits
M208 X0 Y-4 Z-2 S1 ; Set axis minima
M208 X250 Y210 Z210 S0 ; Set axis maxima; Endstops
M574 X1 Y1 S3 ; Set endstops controlled by motor load detection; Stallgaurd Sensitivy
M915 X S3 F0 H200 R0 ; Set X axis Sensitivity
M915 Y S3 F0 H200 R0 ; Set y axis Sensitivity; Z-Probe
M574 Z1 S2 ; set endstops controlled by probe
M307 H7 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
M558 P5 H5 F500 T4000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X15 Y0 Z0.64 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y19:195 S20 ; define mesh grid; Heaters
M307 H7 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
M307 H0 B0 S1.00 ; Disable bang-bang mode for the bed heater and set PWM limit
M305 P0 T100000 B4138 R4700 ; Set thermistor + ADC parameters for heater 0
M143 H0 S120 ; Set temperature limit for heater 0 to 120C
M305 P1 T500000 B4723 C1.196220e-7 ; Set thermistor + ADC parameters for heater 1
M143 H1 S350 ; Set temperature limit for heater 1 to 350C; Fans
M106 P1 T45 I0 S255 H1 F250 ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P0 I0 H-1 F250 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned off; Tools
M563 P0 D0 H1 F0 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C; Automatic saving after power loss is not enabled
; Custom settings are not configured
-
BL Touch Questionposted in General Discussion
I am working on getting my BL touch and bed leveled correctly. I get this message everytime I run the G29 command:
Warning: the height map has a substantial Z offset
I have gone through the procedure and run the G30 command with the probe centered on the bed, then jogged down until the nozzle just touches the bed, I then sent a G29 Z0 command. I then ran the z up 10 mm, and issued a G30 s-1. When it was done, the Z was at .64. So, I changed my G31 line in config.g to have z0.64.
When I home Z, it see that Z is at 5.64, which seems to make sense.
Why do I get the error seen above?
-
RE: Prusa MK3 - Stall detection helpposted in General Discussion
@dc42 I think my home commands are not correct. Can you share an example of what it should look like?
-
Prusa MK3 - Stall detection helpposted in General Discussion
I am just now swapping my Prusa MK3 over to a bear frame and using the Duet Wifi 2 board. I cannot for the life of me get this thing to home correctly. I am using the default Prusa LDO motors. Can someone share the settings for config.g and the home ones so I can see what I am doing wrong? Thanks!