Speaking to Duet 3D: Does bearer speak legally for Duet 3D? If not, please block bearer from posting on my official warranty claim.
I am seeking warranty advice from Duet 3D only.
Thanks,
Posts made by kdsands88
-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
bearer are you speaking for Duet 3D?
I work for Ford Motor Company, and I understand my rights as a customer.
Please stop speaking down to me.
-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
Please confirm you will honor your warranty?
-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
Sorry, bad quality picture.
New picture does not show cracks:

-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
Question: Does the error persist when the motor is disconnected?
Answer: Yes.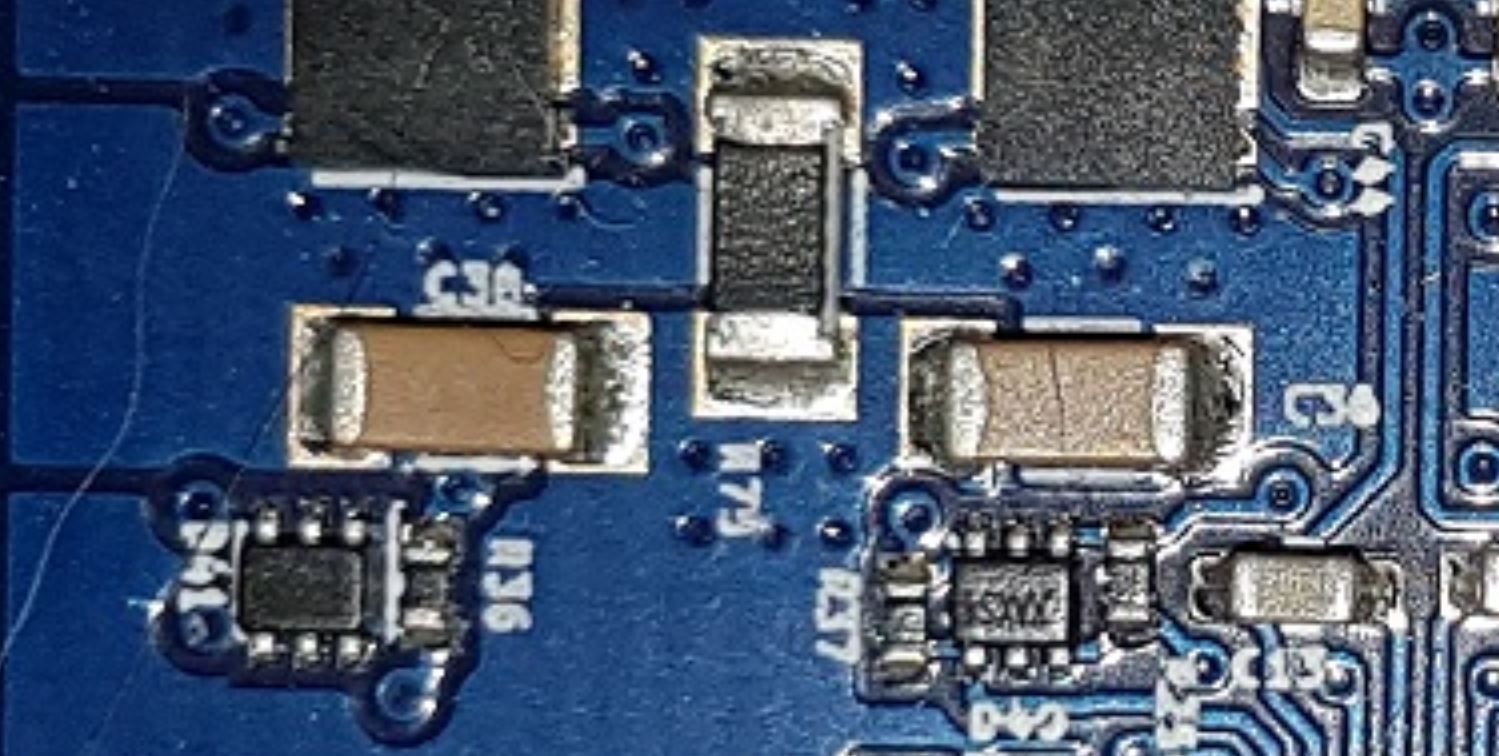
Please see above picture.
Please confirm you see the C38 and C36 resistors are cracked.
Is this the issue?
-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
Question: So the motor rotates fine, just reports the short to ground on driver 0?
Answer: Correct. The motor rotates fine, just reports the short to ground on driver 0.Question: Can you try the motor on a different driver? (And, making sure all 4 pins are crimped correct and fir inside the MOLEX housing.)
Answer: The motor is a test motor I used to root cause the issues with the other drivers. So yes, the motor works on all other drivers with no issue.Question: Which version Duet 3 main board is it?
Answer:
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6J9D2-3S46L-1U2YDPictures:
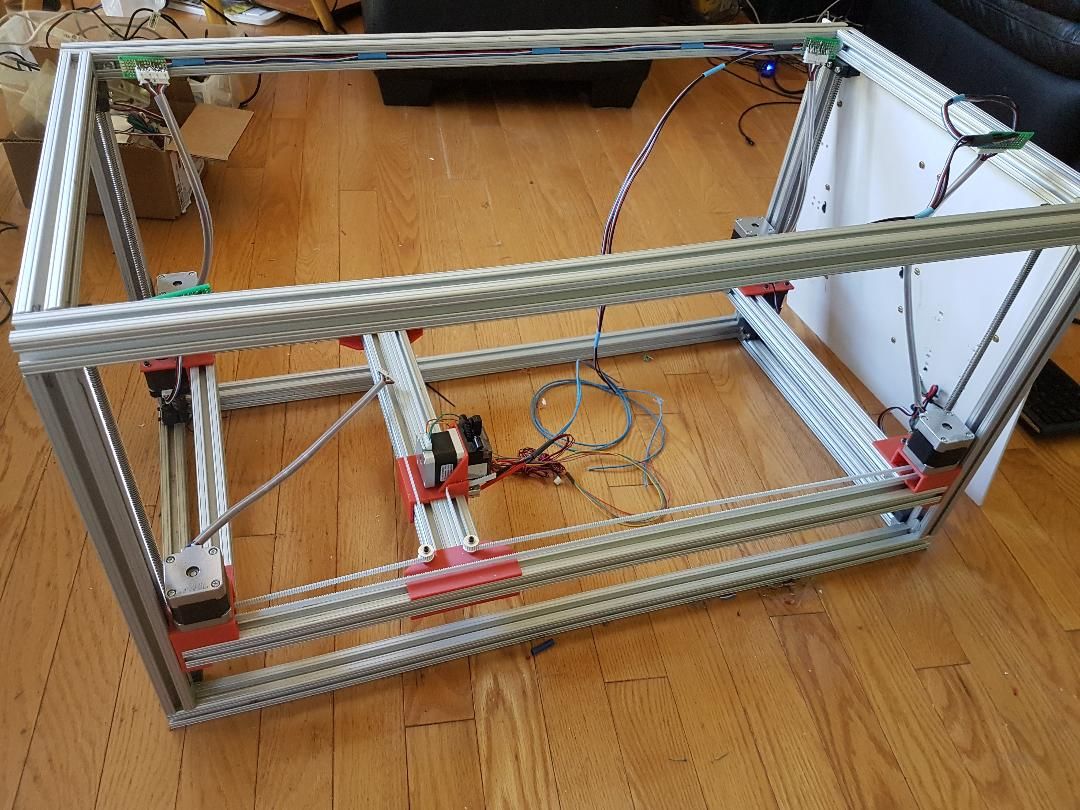
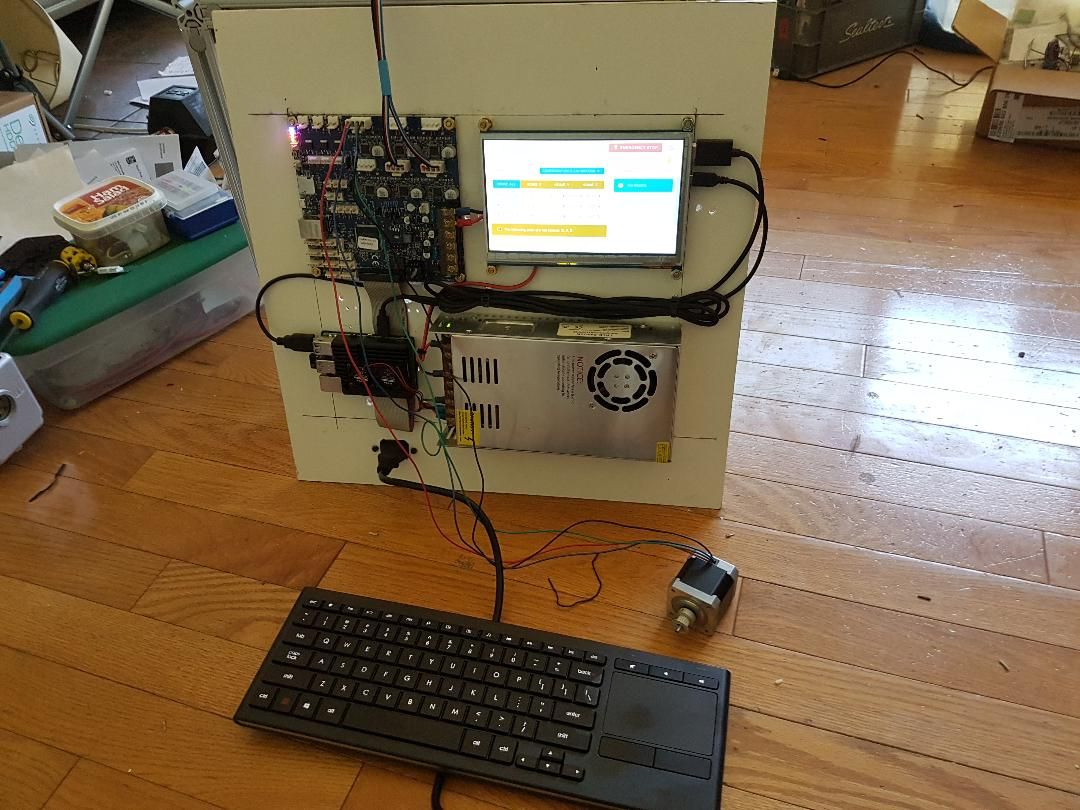
Test motor setup:

Board:

Drivers:

Driver 0:

-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
Note: the stepper motor will rotate.
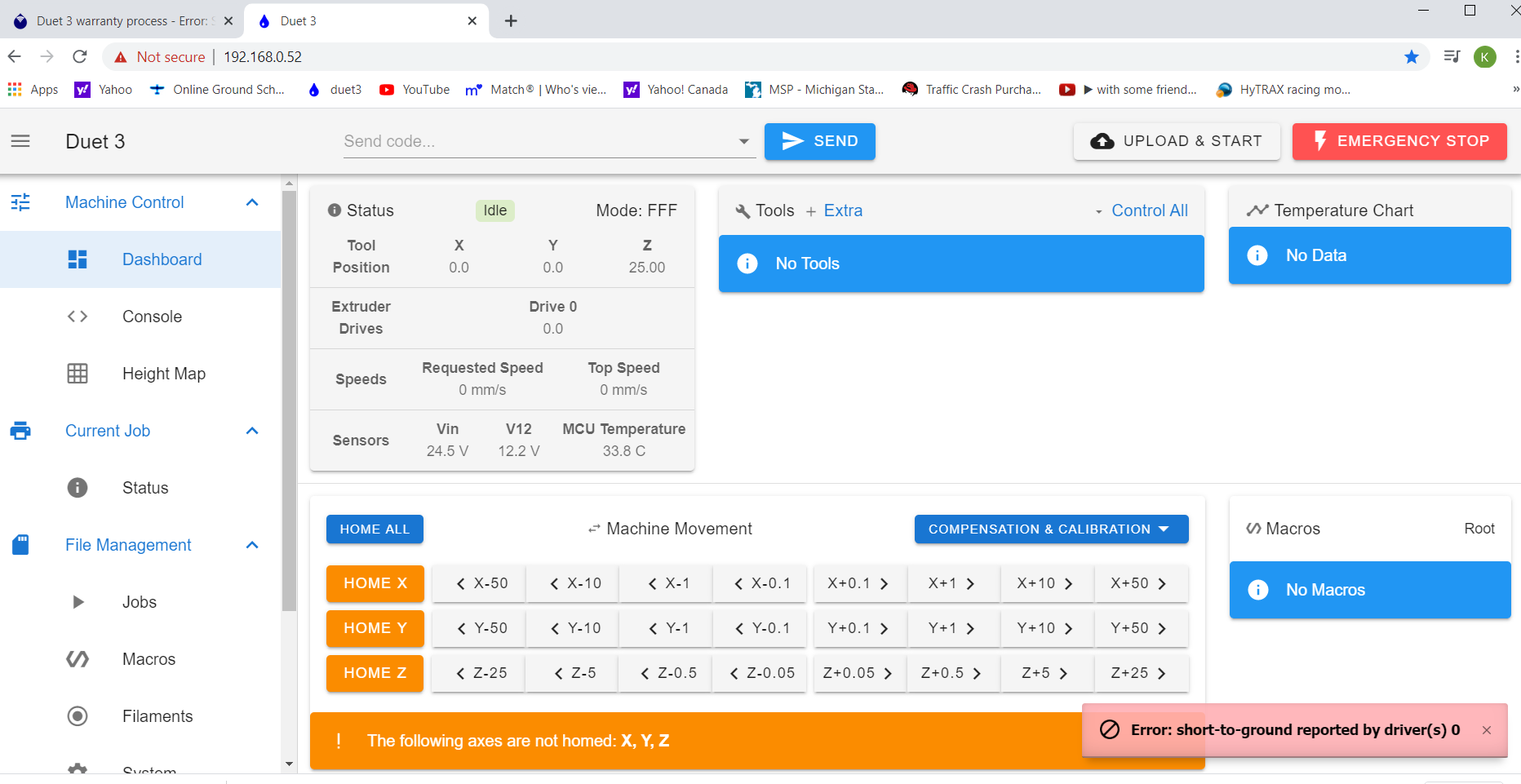
Below is the screen shot showing the error - Error: Short-to-ground on drivers 0
-
RE: Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
"I have had shorts on the wire harness on all drives" - means I got another error stated something like "one of the poles of the motor is not connected"
Again, I root caused the errors to poor wire harness connectors/connections/solder.
Once I fixed the connection issues, all the driver worked except driver 0.
-
Duet 3 warranty process - Error: Short-to-ground on drivers 0posted in Duet Hardware and wiring
I am receiving Error: Short-to-ground on drivers 0.
I am commissioning a new Core XY 3d printer using 4Gb Raspberry Pi with DuetPi. I have had shorts on the wire harness on all drives. Once, I corrected the shorts, I tested all drivers. Now I only have the error on drive 0. All other drives work. Core XY is working correctly.
What is the warranty process? What additional information do you need?
Thanks.
Notes:
Per the reseller: Spool3D Support support@spool3d.ca
Thank you for contacting us. As per Duet3D’s warranty process, please start a new forum thread in their forum so a Duet3D technician can confirm and authorize a warranty replacement:
https://forum.duet3d.com/ReferencePer Duet 3D forum page:
https://forum.duet3d.com/topic/4160/error-short-to-ground-on-drivers-1/4Setup:
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956L2-G43S8-6J9D2-3S46L-1U2YD
Used output buffers: 1 of 40 (10 max)
=== RTOS ===
Static ram: 154604
Dynamic ram: 161432 of which 956 recycled
Exception stack ram used: 224
Never used ram: 76000
Tasks: NETWORK(ready,1972) HEAT(blocked,1416) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1460) TMC(blocked,204) MAIN(running,4952) IDLE(ready,76)
Owned mutexes:
=== Platform ===
Last reset 00:02:19 ago, cause: power up
Last software reset at 2020-07-06 16:57, reason: User, spinning module LinuxInterface, available RAM 75848 bytes (slot 1)
Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 21.6, current 33.6, max 33.8
Supply voltage: min 24.5, current 24.5, max 24.7, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.2, current 12.2, max 12.3, under voltage events: 0
Driver 0: standstill, reads 31964, writes 11 timeouts 0, SG min/max 0/0
Driver 1: standstill, reads 31961, writes 14 timeouts 0, SG min/max 0/0
Driver 2: standstill, reads 31962, writes 14 timeouts 0, SG min/max 0/0
Driver 3: standstill, reads 31962, writes 14 timeouts 0, SG min/max 0/0
Driver 4: standstill, reads 31962, writes 14 timeouts 0, SG min/max 0/0
Driver 5: standstill, reads 31963, writes 14 timeouts 0, SG min/max 0/0
Date/time: 2020-07-07 00:25:02
Slowest loop: 3.58ms; fastest: 0.14ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms
Bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== AuxDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== Heat ===
Bed heaters = -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is ready with "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon* is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 0.86ms; fastest: 0.01ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 0 of 8- Ethernet -
State: disabled
Error counts: 0 0 0 0 0
Socket states: 0 0 0 0 0 0 0 0
=== CAN ===
Messages sent 0, longest wait 0ms for type 0
=== Linux interface ===
State: 0, failed transfers: 0
Last transfer: 16ms ago
RX/TX seq numbers: 3450/3451
SPI underruns 0, overruns 0
Number of disconnects: 0
Buffer RX/TX: 0/0-0
=== Duet Control Server ===
Duet Control Server v3.1.1
Code buffer space: 4096
Configured SPI speed: 8000000 Hz
Full transfers per second: 0.13
- Ethernet -
-
RE: Duet 3 - Diagnosis LED - Will not stop blinkingposted in Duet Hardware and wiring
Just finished the config file. I received a lot errors. Need to go through each error by myself.
Next, I will setup the web interface to my computer and go through the errors.
Thank you for the help.
-
RE: Duet 3 - Diagnosis LED - Will not stop blinkingposted in Duet Hardware and wiring
what topic to you recommend?
Basic setup or unlock stepper motors?
-
RE: Duet 3 - Diagnosis LED - Will not stop blinkingposted in Duet Hardware and wiring
I can read the screen. I entered m564 s0 h0 into the console and got the stepper motor to move.
My next step is to figure out the config file to map the correct drive to the correct motor.
-
RE: Duet 3 - Diagnosis LED - Will not stop blinkingposted in Duet Hardware and wiring
Do you have a user guide for DuetPi on how to use the web interface?
Where do I run the command:
M564 S0 H0 -
RE: Duet 3 - Diagnosis LED - Will not stop blinkingposted in Duet Hardware and wiring
so I ran:
ls /dev/spidev*which returned:
/dev/spidev0.0 /dev/spidev0.1This is my four 3d printer. But, my first scratch built 3d printer.
On the Duet3 main screen at Machine Movement
States:
The following axes are not homed X, Y, ZMy main objective at this point is to confirm my motors and wire harness are working.
The machine I built is Core XY. I do not know how to setup the limit switches yet for the X axis and Y axis.
-
RE: Duet 3 - Diagnosis LED - Will not stop blinkingposted in Duet Hardware and wiring
Yes, slow and steady.
I still can't get a stepper motor to move.
I have re-install DuetPi and ran the following commands on the Pi:
sudo apt-get update
sudo apt-get upgradeMy next step is to run the command below to activate the control port :
sudo raspi-configCorrect?
-
Duet 3 - Diagnosis LED - Will not stop blinkingposted in Duet Hardware and wiring
From:
https://duet3d.dozuki.com/Wiki/Getting_Started_With_Duet_3#Section_Error_codesFrom the above weblink, ''Note: continuous rapid flashing indicated that the CAN connection is lost."
Status says "Idle"
I have setup a config file.
Why does Diagnosis LED keep blinking?
-
RE: When will there be a Duet 3 config file?posted in Duet Hardware and wiring
First, I am not superior.
Could I get FastBot to work? No.
Could I get Replicape - Kamikaze or Replicape - Umikaze? No.I am just frustrate with companies pushing product that they do not supported.
Again, CNClinux.org has been doing this for over 20 years. This is not something new.
-
RE: When will there be a Duet 3 config file?posted in Duet Hardware and wiring
Answer:
https://forum.duet3d.com/topic/10133/m584-format-question-pleaseFor the Duet 3 formatting:
M584 X0.0 Y0.1 Z0.2:0.3 E0.4 ; set drive mapping -- Setup slave motor Z-axis to driver 2 and 3Why can't this be done in the config wizard? I do not know.
-
RE: When will there be a Duet 3 config file?posted in Duet Hardware and wiring
Why is "That will be the normal mode of operation going forward."
This is not acceptable.
So, Duet3D does not support their products?
Again, made two CNC from https://linuxcnc.org/ and never had this kind of problems before.