OK so the problem was the motor mounts. It seems like they transmitted vibrations into the frame. I installed some motor dampers today and everything got much better.
Latest posts made by ropi
-
RE: Very loud motorsposted in Duet Hardware and wiring
-
RE: RRF 3.1+SBC / Board Restart takes much longer than beforeposted in General Discussion
@chrishamm this solved it, thank you!
-
RE: RRF 3.1+SBC / Board Restart takes much longer than beforeposted in General Discussion
Just updated to RRF 3.1.1 and the behaviour stays the same.
-
RRF 3.1+SBC / Board Restart takes much longer than beforeposted in General Discussion
Hi, I recently updated from RRF 3.0 to 3.1 and noticed the Board Reset / Emergency Stop via Web Interface now takes a lot longer than before. Also it seems like the software stack on the SBC restarts as well, causing a lost connection to the DWC for a few seconds. Is there a setting to adjust this behaviour? With 3.0 the board reset was done within like half a second and now it takes what feels like about 5 seconds. I have an Arduino connected to monitor the PS_ON pin and if its not connected for more than a second it switches the printer off. So now with RRF 3.1 every time I want to restart the board via the web interface my printer shuts off. If it there is a setting I can tweak to get the old behaviour back without having to reprogram my Arduino that would be great.
-
RE: Very loud motorsposted in Duet Hardware and wiring
Yes, M569 V30 is set as well:
M569 P0.5 Drive 5 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 40, tpwmthrs 30 (125.0 mm/sec), thigh 200 (18.8 mm/sec) M569 P0.3 Drive 3 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 776, tpwmthrs 30 (125.0 mm/sec), thigh 200 (18.8 mm/sec) M569 P0.2 Drive 2 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 328, tpwmthrs 30 (62.5 mm/sec), thigh 200 (9.4 mm/sec) M569 P0.0 Drive 0 runs in reverse, active low enable, step timing fast, mode stealthChop, ccr 0x08053, toff 3, tblank 1, hstart/hend/hdec 5/0/0, pos 328, tpwmthrs 30 (62.5 mm/sec), thigh 200 (9.4 mm/sec) -
RE: Very loud motorsposted in Duet Hardware and wiring
OK, I just confirmed Interpolation is working by temporarly changing it to I0 in M350 and the sound got even worse

Initial settings:
M115 FIRMWARE_NAME: RepRapFirmware for Duet 3 MB6HC FIRMWARE_VERSION: 3.1.0 ELECTRONICS: Duet 3 MB6HC v0.6 or 1.0 FIRMWARE_DATE: 2020-05-15b1 M915 Driver 0.0: stall threshold 1, filter off, steps/sec 200 (8.0 mm/sec), coolstep 0, action: noneDriver 0.1: stall threshold 1, filter off, steps/sec 200 (16.0 mm/sec), coolstep 0, action: noneDriver 0.2: stall threshold 1, filter off, steps/sec 200 (8.0 mm/sec), coolstep 0, action: noneDriver 0.3: stall threshold 1, filter off, steps/sec 200 (16.0 mm/sec), coolstep 0, action: noneDriver 0.4: stall threshold 1, filter off, steps/sec 200 (40.0 mm/sec), coolstep 0, action: noneDriver 0.5: stall threshold 1, filter off, steps/sec 200 (16.0 mm/sec), coolstep 0, action: noneI tried increasing the H parameter for the stall detection with M915:
M915 P0.0:0.1:0.2:0.3:0.4:0.5 S3 H20000 M915 Driver 0.0: stall threshold 3, filter off, steps/sec 20270 (810.8 mm/sec), coolstep 0, action: noneDriver 0.1: stall threshold 3, filter off, steps/sec 20270 (1621.6 mm/sec), coolstep 0, action: noneDriver 0.2: stall threshold 3, filter off, steps/sec 20270 (810.8 mm/sec), coolstep 0, action: noneDriver 0.3: stall threshold 3, filter off, steps/sec 20270 (1621.6 mm/sec), coolstep 0, action: noneDriver 0.4: stall threshold 3, filter off, steps/sec 20270 (4054.0 mm/sec), coolstep 0, action: noneDriver 0.5: stall threshold 3, filter off, steps/sec 20270 (1621.6 mm/sec), coolstep 0, action: noneBut I didn't notice any change in noise
-
RE: Very loud motorsposted in Duet Hardware and wiring
Hi dc42 and thanks for the quick reply!
M350 Output:
Microstepping - X:16(on), Y:16(on), Z:16(on), E:16(on)"(on)" means Interpolation is enabled or microstepping is enabled? I don't see interpolation specifically mentioned here.
I have tried adding the V30 parameter to the M569 commands for every drive but it doesn't seem to have any effect noise wise. The video is for a test "print" at 30mm/s speed.
About the M915 command I'm not sure. It is for stall detection, but at the moment I have no stall detection configured. You suggest I should set it up as well?
-
Very loud motorsposted in Duet Hardware and wiring
Hi guys,
I'm currently in the phase of building my first 3D printer and unfortunately the movements of the printer are very loud/digital sounding.
I am using a Duet 3 on RFF 3.1 with 24V power supply. One of the main points of this board for me was the "silent" stepper drivers.
I am very disappointed right now about the noise and hope it maybe is just a configuration issue?This video shows the noise problem I have: https://youtu.be/O4xaL3oMB-Y
This is the config section for the motors:
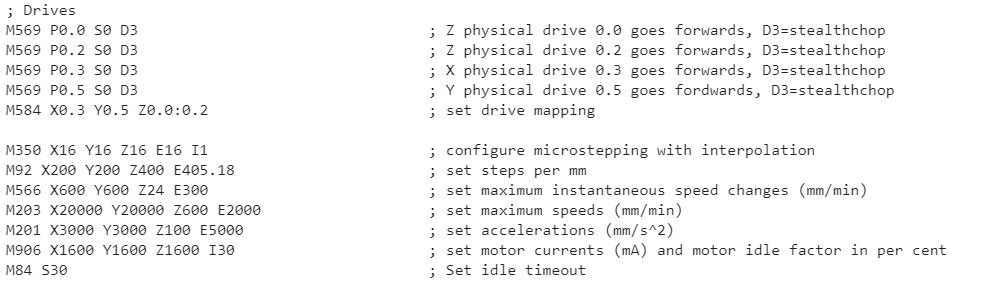
I have played around with different microstepping and motor current values, but the noise only reduces a bit, but not significantly.
You guys have any idea what could be wrong here?