@fcwilt @Phaedrux Well you guys are amazing, after everything you stepped me through I got it working. I have learned a lot and I really appreciate all the help.
Best posts made by ThePfeiffenator
-
RE: Mesh Compensation not moving Z axis Motorsposted in Tuning and tweaking
Latest posts made by ThePfeiffenator
-
RE: Mesh Compensation not working (left side higher than right)posted in Tuning and tweaking
@phaedrux Oh yeah, the trigger height is correct in the center of the bed, but on the sides it is not.
-
RE: Mesh Compensation not working (left side higher than right)posted in Tuning and tweaking
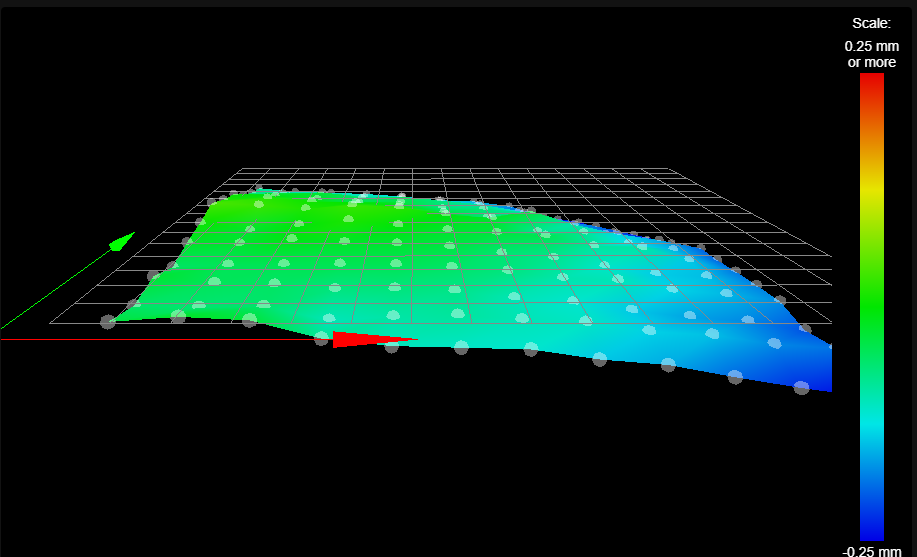
@phaedrux So I did some more investigating and found that my bed is level to my x axis, but here is my new height map, which causes it to compensate incorrectly by moving the bed up when it is in fact level on either side.
-
RE: Mesh Compensation not working (left side higher than right)posted in Tuning and tweaking
So I probed in 5 points around the bed via G30 S-1.
Center: Stopped at height 1.253 mm
Rear Left: Stopped at height 1.072 mm
Rear Right: Stopped at height 0.885 mm
Front Right: Stopped at height 1.138 mm
Front Left: Stopped at height 1.065 mm
So they are definitely different. I use a BL Touch, do you think I have a defective one? Or do you know what might cause my deviations?
-
RE: Mesh Compensation not working (left side higher than right)posted in Tuning and tweaking
@phaedrux Here are the things you requested. Though I do not see a mesh.g file.
M122
M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.3 (2021-06-15 21:44:54) running on Duet WiFi 1.02 or later Board ID: 08DGM-917DA-G4MS8-6JTD2-3SJ6T-T9VB8 Used output buffers: 3 of 24 (11 max) === RTOS === Static ram: 23876 Dynamic ram: 75240 of which 12 recycled Never used RAM 15288, free system stack 184 words Tasks: NETWORK(ready,10.2%,251) HEAT(delaying,0.0%,314) Move(notifyWait,0.1%,364) MAIN(running,86.3%,461) IDLE(ready,3.4%,29), total 100.0% Owned mutexes: === Platform === Last reset 00:00:27 ago, cause: power up Last software reset at 2022-02-19 20:13, reason: User, GCodes spinning, available RAM 15288, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 Step timer max interval 0 MCU temperature: min 17.4, current 20.0, max 20.3 Supply voltage: min 24.1, current 24.2, max 24.3, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Driver 0: position 0, standstill, SG min/max not available Driver 1: position 0, standstill, SG min/max not available Driver 2: position 0, standstill, SG min/max not available Driver 3: position 0, standstill, SG min/max not available Driver 4: position 0, standstill, SG min/max not available Driver 5: position 0 Driver 6: position 0 Driver 7: position 0 Driver 8: position 0 Driver 9: position 0 Driver 10: position 0 Driver 11: position 0 Date/time: 2022-02-20 17:19:19 Cache data hit count 1031252570 Slowest loop: 4.70ms; fastest: 0.17ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 1.5ms, write time 0.0ms, max retries 0 === Move === DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 183.36ms; fastest: 0.00ms Responder states: HTTP(2) HTTP(2) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 1 of 8 - WiFi - Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 WiFi firmware version 1.22 WiFi MAC address bc:dd:c2:89:9f:4c WiFi Vcc 3.36, reset reason Turned on by main processor WiFi flash sizeSocket states: 4 2 0 0 0 0 0 0M98 P"config.g"
HTTP is enabled on port 80 FTP is enabled on port 21 TELNET is enabled on port 23homeall.g
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v3.3.0 on Tue Aug 03 2021 11:42:18 GMT-0500 (Central Daylight Time) M561 M400 M913 X70 Y70 ; drop motor current to 70% M400 G91; relative positioning G1 H2 Z10 F12000 ; lift Z relative to current position G1 H1 X-320.5 F10000 ; move quickly to X axis endstop and stop there (first pass) G1 H2 X5 F12000 ; go back a few mm G1 H1 X-320.5 F7000 ; move slowly to X axis endstop once more (second pass) G1 H2 Z-10 F6000 ; lower Z again G90 ; absolute positioning M400 M913 X100 Y100 ; return current to 100% M400 M400 M913 X70 Y70 ; drop motor current to 70% M400 G91; relative positioning G1 H2 Z10 F12000 ; lift Z relative to current position G1 H1 Y-320.5 F10000 ; move quickly to X axis endstop and stop there (first pass) G1 H2 Y5 F12000 ; go back a few mm G1 H1 Y-320.5 F7000 ; move slowly to X axis endstop once more (second pass) G1 H2 Z-10 F6000 ; lower Z again G90 ; absolute positioning M400 M913 X100 Y100 ; return current to 100% M400 ; BLTouch prep so we don't catch the probe pin on the edge of the bed ; M280 P7 S160 I1 ; Alarm Release and Push-Pin UP just in case it's in alarm and deployed M402 ; Retract probe just in case it's down ; Drop the bed for travel ; G91 ; Relative positioning G1 Z5 F200 H2 ; Lower bed 5mm to ensure it is below the trigger height ; Move probe into position ; G90 ; absolute positioning G1 X145 Y145 F4000 ; Move x and Y axis over to bed center so probe is on top of bed ; Set lower speeds for homing ; M566 Z5 ; Set maximum instantaneous speed changes (mm/min) (Jerk) M203 Z400 ; Set maximum speeds (mm/min) M201 Z100 ; Set maximum accelerations (mm/s^2) ; Probe the bed ; M558 A1 F350 ; Set single probing at faster feed rate G30 ; Do a single probe to home our Z axis M558 A10 F100 ; Set tripple probing at slower feed rate G30 ; Probe again to get a more accurate position ; Set normal speeds again ; M566 Z60 ; Set maximum instantaneous speed changes (mm/min) (Jerk) M203 Z600 ; Set maximum speeds (mm/min) M201 Z600 ; Set maximum accelerations (mm/s^2) ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z3 F100 ; lift Z relative to current position ;G90 ; absolute positioningBed.g
; bed.g ; called to perform automatic bed compensation via G32 ; ; generated by RepRapFirmware Configuration Tool v3.3.0 on Tue Aug 03 2021 11:42:17 GMT-0500 (Central Daylight Time) M561 ; clear any bed transform G29 ; probe the bed and enable compensationStart G-code
M107 ;start with the fan off G28 ;auto home M109 S235; G1 X0 Y20 Z0.2 F3000 ; get ready to prime G92 E0 ; reset extrusion distance G1 Z1.0 F3000 ; move z up little to prevent scratching of surface G1 X2 Y20 Z0.3 F5000.0 ; move to start-line position G1 X5 Y200.0 Z0.3 F1500.0 E15 ; draw 1st line G1 X5 Y200.0 Z0.3 F5000.0 ; move to side a little G1 X5 Y20 Z0.3 F1500.0 E30 ; draw 2nd line ; G1 E27 F3000 ; retract filament 3mm G92 E0 ; reset extruder ; done purging extruder G1 Z1.0 F3000 ; move z up little to prevent scratching of surface G29 S1; -
Mesh Compensation not working (left side higher than right)posted in Tuning and tweaking
Here is my heightmap.
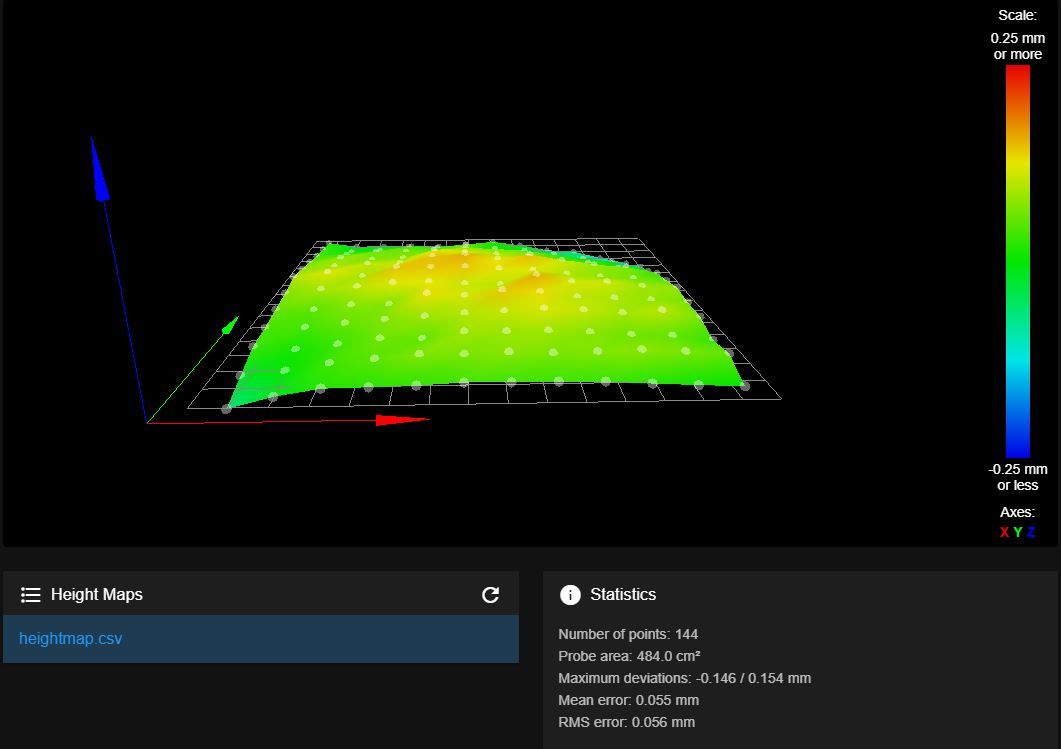
When I try and do a print with Mesh compensation enabled or not the left side is always higher than the right. I know that it is trying as I have seen the motors move, but it doesn't seem like it has any noticeable affect.
Here is my Config.g
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.0 on Tue Aug 03 2021 11:42:17 GMT-0500 (Central Daylight Time) ; General preferences M575 P1 S1 B57600 ; enable support for PanelDue G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"HyperCube" ; set printer name M669 K1 ; select CoreXY mode ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S1 ; enable FTP M586 P2 S1 ; enable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes forwards M569 P1 S0 ; physical drive 1 goes forwards M569 P2 S0 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E409.00 ; set steps per mm M566 X900.00 Y900.00 Z99.60 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X12000.00 Y12000.00 Z600.00 E3000.00 ; set maximum speeds (mm/min) M201 X1000.00 Y1000.00 Z200.00 E10000.00 ; set accelerations (mm/s^2) M906 X950 Y950 Z950 E950 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X271 Y290 Z280 S0 ; set axis maxima ; Endstops M574 X1 S3 F0 R0 ; Set active High endstops (S1=SENSORED) (X-MIN(1)) (S3=SENSORLESS) M574 Y0 S3 F0 R0 ; Set active High endstops (S1=SENSORED) (Y-MIN(1)) (S3=SENSORLESS) M574 X1 Y1 S3 ; Set endstops controlled by motor load detection M574 Z1 S2 ; configure sensorless endstop for low end on Y and X M915 X Y S7 R0 F0 ; Z-Probe M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H3 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X-2 Y-38 Z1.25 ; set Z probe trigger value, offset and trigger height M557 X15:250 Y15:250 S20 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans ;M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency ;M106 C"PartCoolingFan" P0 S0 H-1 B1 ; set fan 0 value. Thermostatic control is turned off ;M950 F1 C"fan1" Q500 ;HOTEND FAN create fan 1 on pin fan1 and set its frequency ;M106 C"HotendFAN" P1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F0 C"fan0" Q500 M106 P0 S0 H-1 B1 M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F1 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined M671 X50:250:250:50 Y250:250:50:50 P0.5 ; point1 (50,250), point2 (250,250), point3 (250,50), point4 (50,50) ; Miscellaneous M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power lossLet me know if you need anything else. I have never felt so dumb in my life trying to figure this thing out.
-
RE: Mesh Compensation not moving Z axis Motorsposted in Tuning and tweaking
@fcwilt @Phaedrux Well you guys are amazing, after everything you stepped me through I got it working. I have learned a lot and I really appreciate all the help.
-
RE: Mesh Compensation not moving Z axis Motorsposted in Tuning and tweaking
@fcwilt Still starting way too high for some reason. I am going to try an probe the bed with G29 again to see if that helps.
-
RE: Mesh Compensation not moving Z axis Motorsposted in Tuning and tweaking
@fcwilt Yeah when I go the G90 G1 Z0 and it does touch the bed. I have G29 S1 in my start gcode, but it wasn't showing on in the dashboard. I turned it on there and we will see what happens.
-
RE: Mesh Compensation not moving Z axis Motorsposted in Tuning and tweaking
@phaedrux Yeah I went through an corrected everything you told me to. I had it at Z0.95 and now I have it at Z0.825, but for some reason it is starting way too high now. Very confusing. I just put it to what the G30 S-1 showed after checking it multiple times that way. Measuring right in the middle of the bed.
-
RE: Mesh Compensation not moving Z axis Motorsposted in Tuning and tweaking
@phaedrux So I did the Probe calibration, but for some reason it is starting too high when I start the print now. Any idea why that would be? I followed the guide multiple times and am still have issues with it being to far from the bed for some reason.