Cambio elettronica
-
; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Thu Apr 02 2020 16:46:31 GMT+0200 (Ora legale dell’Europa centrale)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 Y-335 F1800 ; move quickly to Y axis endstop and stop there (first pass)
G1 Y5 F6000 ; go back a few mm
G1 H1 Y-335 F360 ; move slowly to Y axis endstop once more (second pass)
G1 H2 Z-5 F6000 ; lower Z again
G90 ; absolute positioning -
non ho sistemato i file di homing perche' trovo piu' necessario il sensore per adesso, una volta appurato che il sensore fa fermare il piatto allora mi ci mettero' dietro
-
-
ragazzi non so che cacchio ho fatto, ma il piatto si ferma, l'unica cosa che ho fatto e' stato togliere la sd da duet, portarla sul pc, riformattarla e ricaricargli tutto il sistema, una volta fatto cio' ho reinserito la sd nel duet, son dovuto ricorrere a yat, una volta fatto tutto ho riprovato ed incredibilmente funziona, ora vediamo di risolvere gli assi di home
-
houston abbiamo un problema
-
This post is deleted! -
l'asse z risponde come dovuto +25 si abbassa e -25 si alza anche in automatico
l'asse x e y sempre in manuale rispondono bene
ma quando vado a fare l'homing come mi aspetto l'asse z si abbassa, ma gli assi x e y se ne vann dalla parte opposta e in diagonale, i finecorsa sono dalla parte opposta cioe' asse X davanti a sx e l'asse Y davanti a dx e si spostano di 10 / 15cm poi si fermano e l'asse z va a trovare il sensore come dovuto -
nella configurazione il comando M569 P0 S1 e M569 P1 S1 li ho cambiati in M569 P0 S0 e M569 P1 S0
ma non riescono ad andare dove ci sono i stop perche' si fermano prima ed in manuale gli assi x e y vanno al rovescio -
Mi passate per cortesia una configurazione esempio per la corexy sulla movimentazione?
-
toc toc... c'e' nessuno?
-
ok chi fa da se fa x tre
-
It sounds like you're having a common problem experienced with corexy setups. I will copy and post a description of what must be done. Consider it an order of operations. It will hopefully get you on the right track. Please post if you have any questions.
https://forum.duet3d.com/topic/12676/mirrored-x-axis/9?_=1585861769573
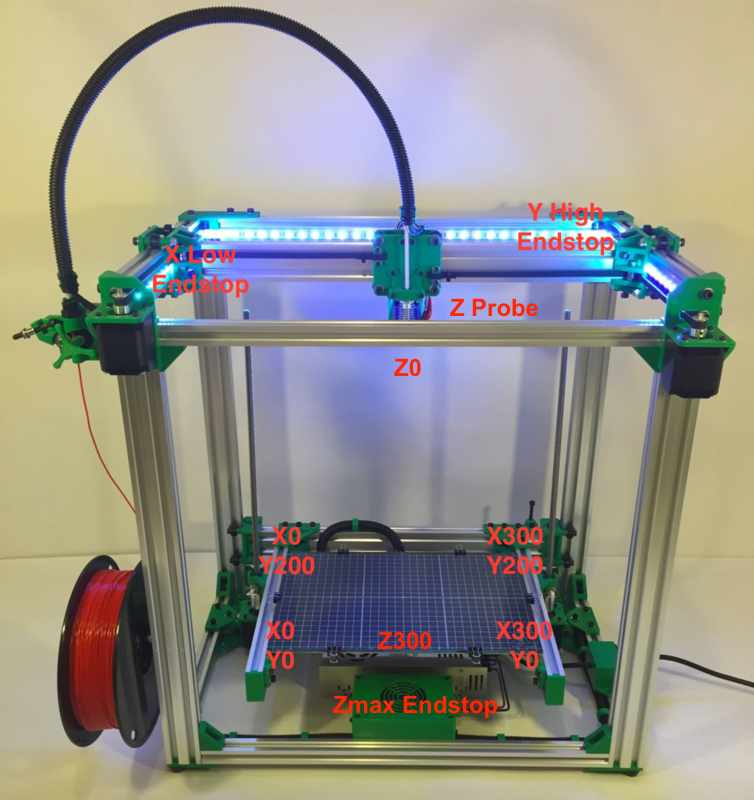
In general, here's what you need to do to define your coordinate system. The FT5 is a little tricky because by default it puts the origin at the rear right, and has some printed grid on the bed surface (I think?) but really it's all arbitrary.
First, choose a FRONT for the printer so that when you're looking at it standing in front of it 0,0 is the front left corner, X+ goes to the right, Y+ goes to the back. This does not change because it's describing the physical layout of the printer.
Next, Measure the axis length for X and Y and enter that in your M208 command to set the axis limits. 0 at the low end (or even negative if the head leaves the bed surface to hit the endstop). This does not change because it's describing the physical layout of the printer.
Now identify where your endstops are located. They can be at the low or high end of the axis. Define them with M574. M574 X1 Y1 for low side, M574 X2 Y2 for high side, or any combo thereof. This does not change because it's describing the physical layout of the printer.
Now setup your homing movements. If the endstop is at the low end of the axis, the homing move must be negative. And vice versa. This does not change because it's describing the physical layout of the printer.
Now test the motor movement direction. If X+ moves to the right, you're good to go. If it moves left, you need to change the motor rotation for the X driver by changing the M569 S0/S1 command in config.g. Same goes for Y+ moving to the back. If you've connected the motors to their default drivers, it should be mapped like this:
M569 P0 S0 ; Drive 0 (x) goes backwards
M569 P1 S0 ; Drive 1 (y) goes backwards
M569 P2 S0 ; Drive 2 (z) goes backwards
M569 P3 S0 ; Drive 3 (e) goes backwards
If you follow those steps your printed parts will match the orientation in the slicer and won't be mirrored.You can use these steps to test your motor movement and make changes accordingly: https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareCoreXYPrinter#Section_Testing_motor_movement
-
@Leblond Sorry, I'm using google translate, but I don't really understand what problem you are having. I think you say your motors are moving the X and Y axes correctly, but not towards the endstops.
First, check the X and Y axis are moving in the correct direction for CoreXY. See https://duet3d.dozuki.com/Wiki/Test_axes_or_motors_individually
Once the X and Y axis move correctly, then get the endstop configuration correct. You have the endstops set in config.g at the low end, X0 Y0.
; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystopYour homeall.g moves X and Y to the minimum, by moving X-335 and Y-335 towards the endstops. Is this not correct?
It may be a good idea to draw a picture to show where everything is on your printer, like this, which will help us understand where everything is without using Google translate:
Ian
-
ti capisco ho problemi di comunicazione anche io, scrive cio' che pare a lui e adesso ne ho capito la causa, il problema e' che devi srivere senza la correzione del traduttore, ma attivarlo solo quando leggi, si ho risolto per fortuna il problema del sensore, riformattando la SD, e si ho il problema di movimentazione degli assi x e y, grazie per il momento @droftarts ci guardo e poi ti dico.
-
@droftarts una domanda, le coppie delle fasi del motore indicate sull'immagine https://duet3d.dozuki.com/Wiki/Duet_Wiring_Diagrams : cioe' 1A+1B 2A+2B sono queste, ma se nei motori le fasi non sono corrette? che problemi puo' dare?
-
Use this method to identify the phases: https://duet3d.dozuki.com/Wiki/Choosing_and_connecting_stepper_motors#Section_Identifying_the_stepper_motor_phases
-
@Phaedrux ok fatto grazie 1000
-
@Leblond if the phases are wrong, The motors won’t move and you will quickly get a message that there is a problem. As your motors are moving, I think your motors are correctly wired.
Ian
-
@Phaedrux ok allora le fasi sono corrette, un problema in meno

ho misurato gli assi e ho 352mm su x, e 352mm su y, si parla anche di valori negativi se la testina di stampa esce dal piatto
quindi nel comando M208 invece di X0 dovrei mettere M208 X-5 mm, perche' la testina e' fuori dal piatto di 5mm a sx come X min, e come X max dovrei mettere M208 X352 mm, perche' si parla di layout fisico giusto? -
That sounds correct.