bltouch
-
Thank you
; homedelta.g
; called to home all towers on a delta printer
;
; generated by RepRapFirmware Configuration Tool v3.1.3 on Sat Jun 27 2020 18:57:16 GMT+0200 (heure d’été d’Europe centrale)
G91 ; relative positioning
G1 H1 X405 Y405 Z405 F1800 ; move all towers to the high end stopping at the endstops (first pass)
G1 H2 X-5 Y-5 Z-5 F1800 ; go down a few mm
G1 H1 X10 Y10 Z10 F360 ; move all towers up once more (second pass)
G1 Z-5 F6000 ; move down a few mm so that the nozzle can be centred
G90 ; absolute positioning
G1 X0 Y0 F6000 ; move X+Y to the centre; bed.g
; called to perform automatic delta calibration via G32
;
; generated by RepRapFirmware Configuration Tool v3.1.3 on Sat Jun 27 2020 18:57:16 GMT+0200 (heure d’été d’Europe centrale)
M561 ; clear any bed transform
G28 ; home all towers
; Probe the bed at 10 peripheral and 6 halfway points, and perform 8-factor auto compensation
; Before running this, you should have set up your Z-probe trigger height to suit your build, in the G31 command in config.g.
G30 P0 X0 Y117.2 H0 Z-99999
G30 P1 X80.93 Y111.38 H0 Z-99999
G30 P2 X142.66 Y46.35 H0 Z-99999
G30 P3 X142.66 Y-46.35 H0 Z-99999
G30 P4 X88.17 Y-121.35 H0 Z-99999
G30 P5 X0 Y-150 H0 Z-99999
G30 P6 X-83.34 Y-114.71 H0 Z-99999
G30 P7 X-113.38 Y-36.84 H0 Z-99999
G30 P8 X-103.96 Y33.78 H0 Z-99999
G30 P9 X-63.9 Y87.95 H0 Z-99999
G30 P10 X0 Y46.69 H0 Z-99999
G30 P11 X63.74 Y36.8 H0 Z-99999
G30 P12 X64.95 Y-37.5 H0 Z-99999
G30 P13 X0 Y-75 H0 Z-99999
G30 P14 X-43.98 Y-25.39 H0 Z-99999
G30 P15 X-36.59 Y21.12 H0 Z-99999
G30 P16 X0 Y0 H0 Z-99999 S8
; Use S-1 for measurements only, without calculations. Use S4 for endstop heights and Z-height only. Use S6 for full 6 factors
; If your Z probe has significantly different trigger heights depending on XY position, adjust the H parameters in the G30 commands accordingly. The value of each H parameter should be (trigger height at that XY position) - (trigger height at centre of bed) -
m401 m402 g30 everything works
-
(i also have a problem with the z axis in home i don't know why it stops before the endstop)
Are you sure that your steps per mm is 80?
-
-
@Phaedrux yes mm is 80

-
G1 H1 X405 Y405 Z405 F1800 ; move all towers to the high end stopping at the endstops (first pass)
Try increasing the distance moved for the initial homing to ensure that it goes far enough to hit the endstops.
That may solve one problem if you're sure 80 steps per mm is correct and it's moving the correct amount.
-
@Phaedrux yes I read but I don't know where I went wrong you can help me I'm really desperate
-
I'll do my best, unfortunately I'm not a delta guru. All I can really do is suggest to go through those docs carefully and try and understand what's going on. I can try and answer any specific questions.
-
ok
thank you
-
I'm hoping that if we resolve the initial homing the probing will fall into place. If M401 M402 and G30 work correctly to deploy the pin and cause the head to move towards the bed that means the probe itself is working correctly.
-
-
That should do it.
-
gives me this error
can I send you a video tomorrow? so you understand me better -
G1 X0 Y0 F6000 ; move X+Y to the centre
https://duet3d.dozuki.com/Wiki/Calibrating_a_delta_printer#Section_Homing_the_machine
See this section
-
@Phaedrux good morning i read in your opinion should i delete it? G1 X0 Y0 F6000 ; move X+Y to the centre
-
@Phaedrux ok perfect I solved the problem of the z axis by deleting this G1 X0 Y0 F6000; move X + Y to the center now and only one bltouch problem you can do

-
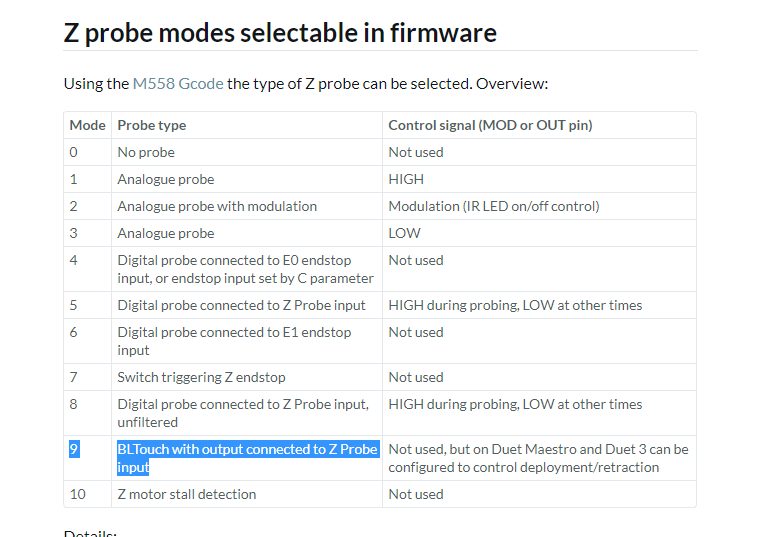
hi I managed to get it working by changing the P9 to the P5 should be P9
peche? can you explain it to me?M558 P5 H5 F120 T3000
-
Yes the BLTouch should use P9.
I'm curious now what firmware version you are running. Should be 2.05.1.
Can you please send M122 and post the results? -
yes
M122=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 2.05.1 running on Duet WiFi 1.02 or later
Board ID: 08DGM-956GU-DJMSN-6J1FL-3SJ6S-T9NVD
Used output buffers: 3 of 24 (9 max)
=== RTOS ===
Static ram: 25712
Dynamic ram: 92604 of which 396 recycled
Exception stack ram used: 432
Never used ram: 11928
Tasks: NETWORK(ready,628) HEAT(blocked,1232) MAIN(running,348) IDLE(ready,160)
Owned mutexes:
=== Platform ===
Last reset 00:40:29 ago, cause: power up
Last software reset at 2020-06-28 19:10, reason: User, spinning module GCodes, available RAM 11968 bytes (slot 1)
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d
Error status: 0
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest block write time: 6.1ms, max retries 0
MCU temperature: min 29.1, current 40.2, max 40.8
Supply voltage: min 11.9, current 12.1, max 12.2, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: standstill, SG min/max 0/381
Driver 1: standstill, SG min/max 0/371
Driver 2: standstill, SG min/max 0/377
Driver 3: standstill, SG min/max not available
Driver 4: standstill, SG min/max not available
Date/time: 2020-06-28 20:37:50
Cache data hit count 4294967295
Slowest loop: 49.05ms; fastest: 0.07ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Move ===
Hiccups: 0, FreeDm: 160, MinFreeDm: 154, MaxWait: 305348ms
Bed compensation in use: mesh, comp offset 0.000
=== DDARing ===
Scheduled moves: 422, completed moves: 422, StepErrors: 0, LaErrors: 0, Underruns: 0, 0
=== Heat ===
Bed heaters = -1 -1 -1 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Stack records: 2 allocated, 0 in use
Movement lock held by null
http is idle in state(s) 0
telnet is idle in state(s) 0
file is idle in state(s) 0
serial is idle in state(s) 0
aux is idle in state(s) 0
daemon is idle in state(s) 0
queue is idle in state(s) 0
autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 15.44ms; fastest: 0.00ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8- WiFi -
Network state is running
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 0
WiFi firmware version 1.23
WiFi MAC address 5c:cf:7f:76:6a:14
WiFi Vcc 3.34, reset reason Turned on by main processor
WiFi flash size 4194304, free heap 25944
WiFi IP address 192.168.1.35
WiFi signal strength -63dBm, reconnections 0, sleep mode modem
Socket states: 0 0 0 0 0 0 0 0
- WiFi -
-
So what exactly happens when you have it set to P9 and do this test?